(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ НАМАТЫВАЕМОГО НА ПАКОВКУ МАТЕРИАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| Устройство для намотки нити | 1987 |
|
SU1461735A1 |
| УСТРОЙСТВО ДЛЯ НАМАТЫВАНИЯ ПРЯЖИ НА КОНИЧЕСКУЮ ПАКОВКУ | 1991 |
|
RU2019492C1 |
| Устройство для намотки нити | 1980 |
|
SU895869A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТКАЦКИХ НАВОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061807C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРТИИ БОБИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2483015C2 |
| Устройство для намотки нити | 1972 |
|
SU482378A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| Способ формирования паковки синтетических нитей | 1989 |
|
SU1806079A3 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
1
Изобретение относится к устройствам для измерения натяжения наматываемого на паковку материала, конкретнее, к устройствам для измерения натяжения нитей на сновальных и шлихтовальных машинах.
Известно устройство для измерения натяжения нитей, содержаш.ее датчик натяжения, выполненный в виде вала, связанного с преобразователем усилия в электрический сигнал, соединенным через корректирующий блок с регистратором 1.
Недостаток известного устройства заключается в том, что контроль натяжения нитей производится-без учета изменения угла охвата нитями чувствительного вала при увеличении или уменьшении диаметра паковки, что ведет к снижению точности измерения. , Цель изобретения - повышение точности измерения.
Поставленная цель достигается тем, что корректирующий блок состоит из потенциометра и датчика частоты вращения паковки, выход которого кинематичес;ки связан с движком потенциометра.
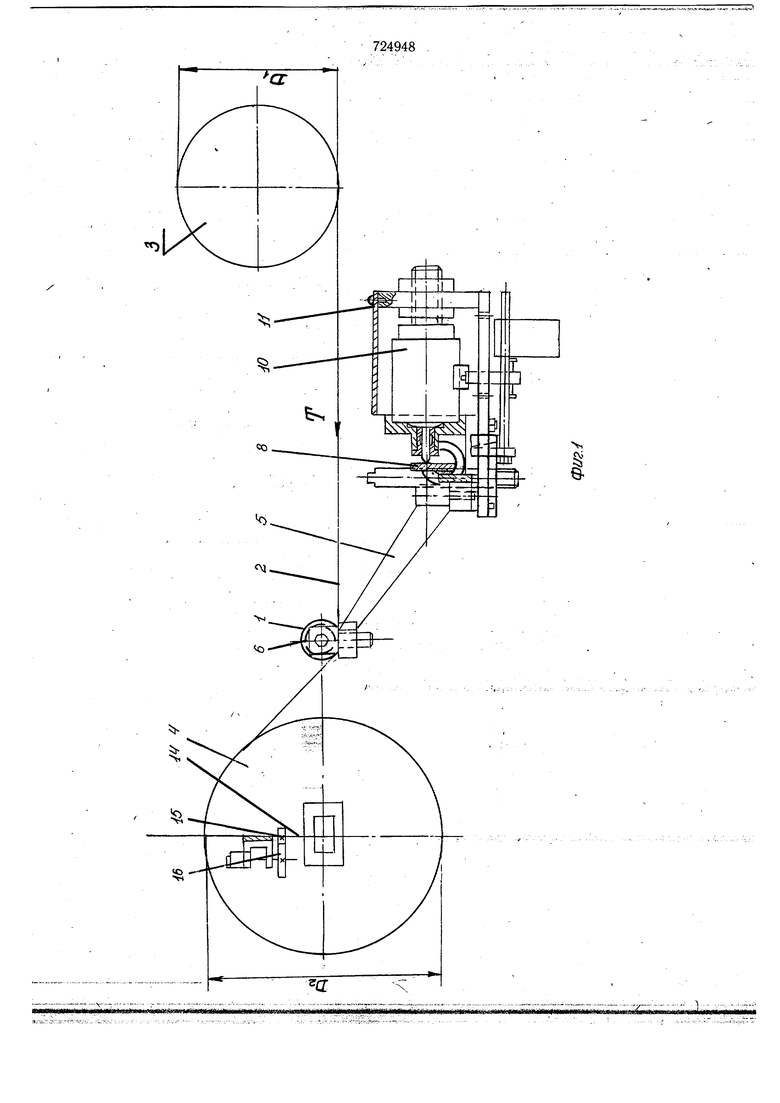
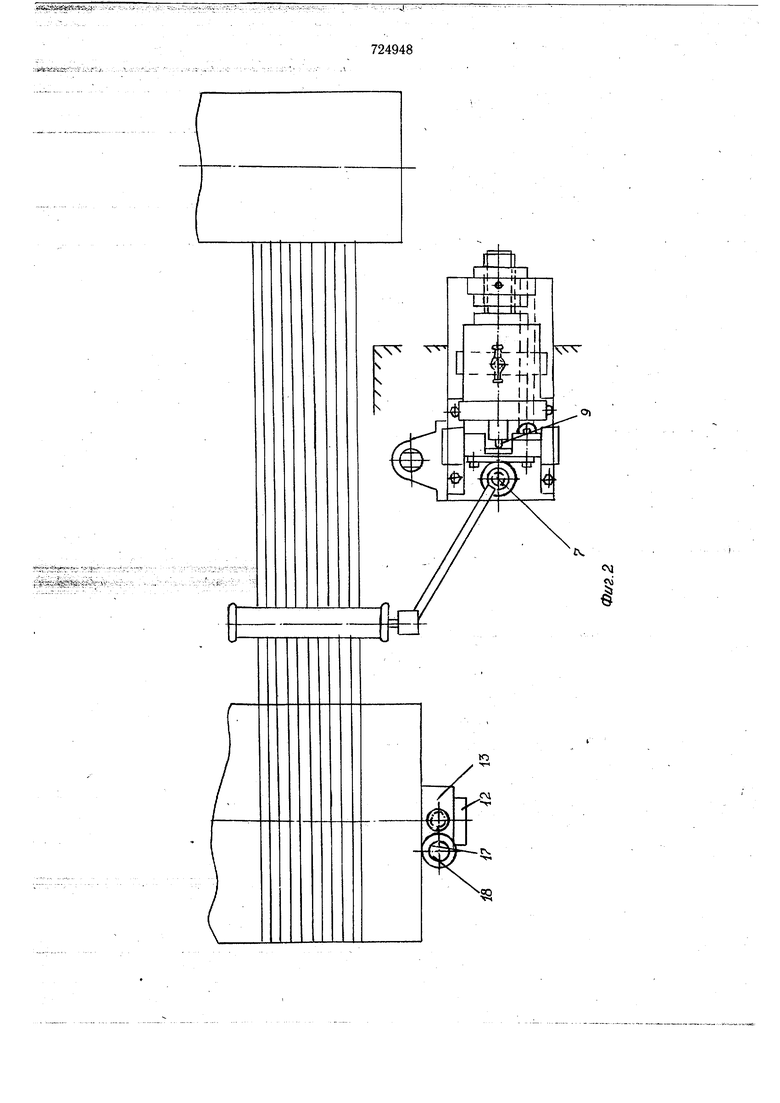
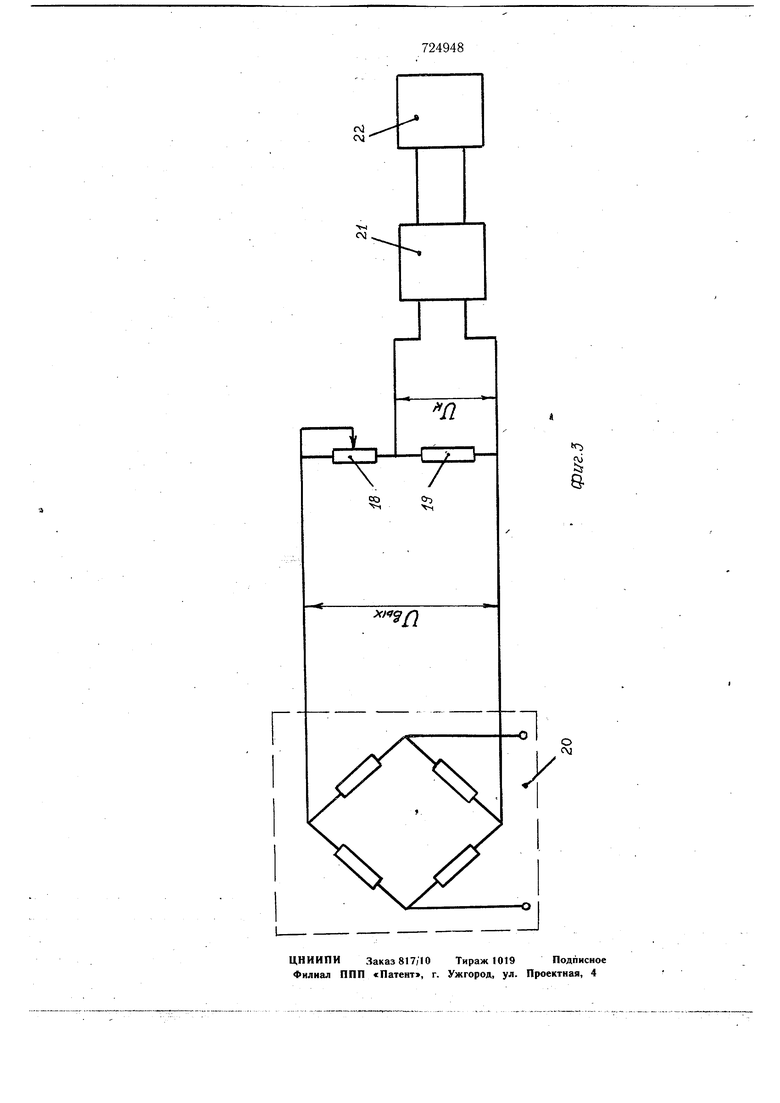
На фиг. 1 показан общий вид и место установки устройства; на фиг. 2 - устройство, вид сверху; на фиг. 3 - структурная схема устройства.
Устройство состоит из валика 1, который находится в контакте с нитями основы 2, сматываемых с входной паковки 3 диаметром D, и наматываемых на входную паковку 4, диаметром Dj. Валик I установлен на кроьщтейне 5 в подшипниках 6. Кронштейн 5 закреплен на оси 7, к которой приварена пластина 8, контактирующая с чувствительным элементом 9 тензорезисторного датчика 10, установленного на подставке 11. На валу паковки 4, установлен датчик частоты вращения 12, включающий редуктор 13. На оси 14 редуктора 13 закреплена шестерня 15, которая кинематически связана с шестерней 16. Шестерня 16 механически связана с движком 17 переменного электрического сопротивления потенциометра 18. Переменное электрическое сопротивление 18 (фиг. 3) включено последовательно с постоянным электрическим сопротивлением 19, образуя корректирующую цепь 18-19, которая подключена на выход (Uflbot) электрической схемы 20 тензорезисторного датчика 9. Постоянное напряжение (UKOP), снимаемое с корректирующей
Ч fiSgr ftl Чй ir. . :i6fc; ;i; -Jifc;v 4iS -3jSg5 S ffi: a Sg ;i;f ; ,-:
цепи 18-19 подано на преобразователь 21, связанный с регистраторов 22.
Устройство работает следующим образом. : :- : -.-.В процессе перевиванид нитей основы 2 с паковки 3 на паковку 4 нити контактируют с валиком 1 и передают усилие Р через кронштейн 5 и пластину 8 к чувствительному элементу 9 тензорезисторного датчика, 10. По мере перевивания,оснрвь 2 происхо/ ит изменение диаметров Dt и Dg паковок 3 и 4, а следовательно, и усилия, воспринимаемого тензорезисторным датчиком. Величину напряжения ивь«. пропорциональную приложенному усилию Р, подают на корректирующую цепь 18-19. В это время при вращении выходной паковки 4 через кинематическую передачу 13, 15, 16 производят непрерывное врвщение движка 17 переменного сопротивления 18, а следовательно, и изменение его величины. В этом случае на выходе корректирующей цепи 18-19 получают напряжение 3щ, пропорционального измеряемой величине натяжения. Инва- r; --риантность сигнала, пропорционального измеряемой величине натяжения от изменения угла охвата нитями орновы измерительного вала при изменении диаметров входной и выходной паковок достигают за счет подбора на основании расчета величин электрических сопротивлений корректирующей цепи 18-19.
Исходной формулой для расчета корректирующей цепи берут зависимость величины усилия, передаваемого; к тензррезистбрному датчику от углов, образуемых набегающей и сбегающей ветвью нитей основы и осью кронштейна 5 Передачи усилия Р от валика к чувствительному элементу 9 тензорезистор- .ного датчика 10.
724948
Величину усилия (F), воспринимаемого тензорезисторным датчиком 10 определяют по формуле
F Т (sin а -sin /5), где Т - измеряемое натяжение; а - угол , образуемый между набегающей ветвью нитей и осью кронщтейна 5; ;, .,f. /.
S - угол, образуемый между сбегающей ветвью гнитей и осью кронщтейна 5. Направление оси кронщтейна 5 передачи усилия Р от валика 1 к чувствительному элементу 9 тензорезисторного датчика 10 всегда можно выбрать таким, что при подставке в формулу углов ч к f при минимальном и максимальном диаметрах входной и выходной паковок, получают линейный закон измерения усилия F с требуемой точностью. На орнрв нии этой зависимости определяют номиналы линейных электрических сопротивлений 18 и 19 корректирующей цепи.
Формула изобретения
Устройство для измерения натяжения наматываемого на паковку материала, содержащее датчик натяжения, выполненный в виде вала, связанного с преобразователем усилия в электрический сигнал, соединенным через корректирующий блок с регистратором, отличающёёся тем, что, с целью повышения точности измерения, корректирующий блок состоит из потенциометра и датчика частоты вращения паковки, выход которого кинематически связан с движком потенциометра.
Источники информации принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 454552, кл. G 01 L 5/04, 1974:
724948
ii:fiS;J|gfe «-i
0
S
