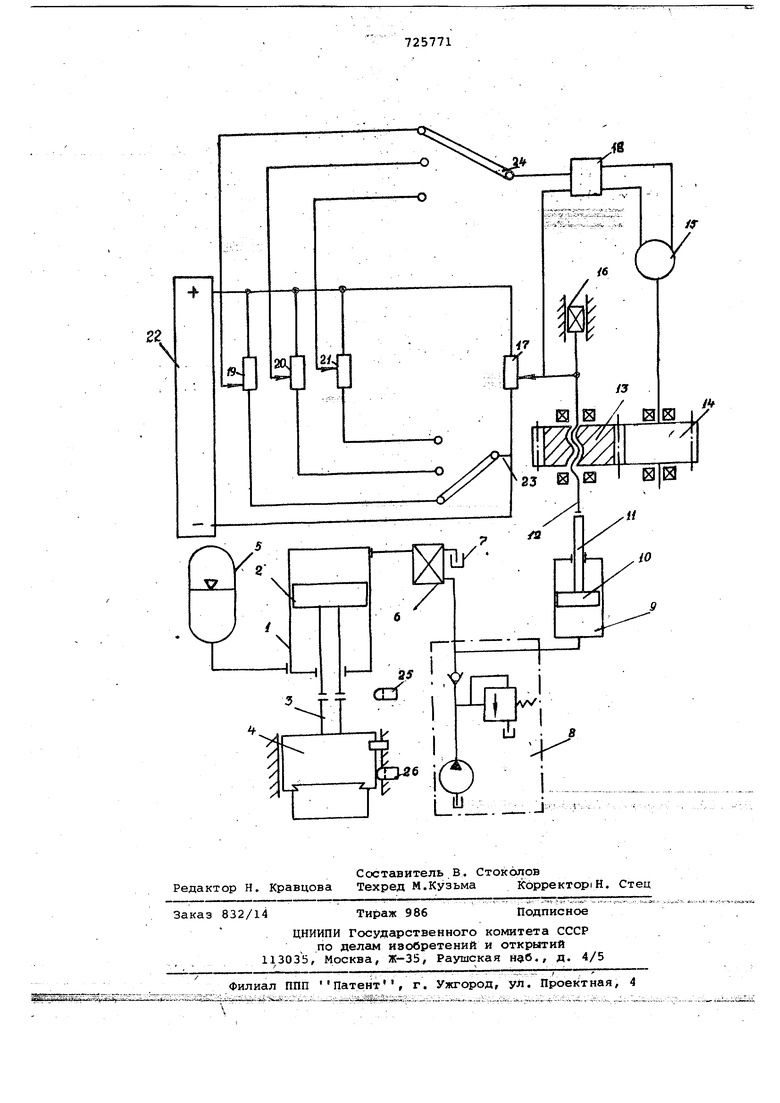
(54) СИСТЕМА УПРА Изобретение относитс-я к машиностроению и, в частности.к конструкции машин для обработки давлением. Известна система управления штамповочным молотсм, содержащая гидравлический цилиндр привода подвижных частей молота, штоковая полость которого соединена с аккумулятором воз вратного хода, а поршневая через гид рораспределитель - со сливным баком, насосной установкой и аккумуляторомдозатором, поршень которого соединен с винтом,.кинематически связанным с привЬдной гайкой 1. . Однако такая система не обеспечивает точной регулировки энергии сери ударов. Цель изобретения - повышение точнб ти дозирования энергии удара и повышение надежности. х л Указанная цель достигается тем, что система управления снабжена шаго вым искателем с двумя полями, усилителем, реохордом и переменными резисторами, причем подвижный контакт реохорда закреплен на упомянутом виН те и электрически с входом усилителя а выход последнего соединен с приводом гайки. МОЛ ИЯ ЮТАМПОВОЧНЫМ Ш П г Ь :ФШ I На чертеже изображена функциональная схема системь управления штамповочным молотом. В рабочем гидроцилиндре 1 смонтирован поршень 2, соединенный штоком 3 с подвижными частями 4, штоковая полость рабочего ,гидроцилиндра 1 связана трубопроводом с аккумулятором 5 возвратного хода, поршнебая полость связана трубопроводами и распределителем 6 со сливным баком 7, насосной установкой 8 и аккумулятором-дозатором 9. Поршень 10 аккумулятора-дозатора 9 иерез плунжер 11 связан с упором 12 механизма ограничения перемещения поршня 10. Упор 12 выполнен в виде винта и кинематически связан с гайкой 13, которая внешним зубчатым зацеплением соединена с другим зубчатым колесом 14 и реверсивнь м электродвигателем 15. Для гарантированного линейного перемещения упора 12 предусмотрено шлицевое соединение 16, Механизм ограничения перемещения поршня 10 аккумулятора:-дозатора 9 состоит из винта 12, расположенного в гайке 13, установленной в подшипниковом узле, и механически связан с подвижным контактом реохорда 17, i причем этот контакт электрически со 7 И айВг«ижй 1 - ; ----- - . , единен с входом усилителя ,18.. Реохорд с подвижным контактом 17 испольэует сГя В 1 аЧеетве плеча моста, другие плечи которого образуют один из пеё ёйённйх резистороэ с подвижным контактом 19, 20, 21ceoTBeTcfBeHHO. ОДНИ неподвижные контакты резисторов 19,20 и 21 электрически соеди нены между собой с источником 22 по е Ш йВШтЬк и неподвижным контактом реохорда 17, а дрТгйе KotfTkKffi этих резисторов электри е1 яге бёда йё нй с койтактами- второго П071Я шагового искателя 23, нулевой 8ЙГ 1 1 1 Ш&1Е бГо -еьёайнён со йторым нёподвийснБм К011тактом реохорда 17 и источником 22 постоянного тока. Подвижные контакты переменных резисторов 19, 20 и 2Г ссУёдйнёйЫ С коктЖктатаи перЁого поля шагового искателя 24, нулевой контакт которого связан с входом электронного усилите-ля-18. , , , Ва: бЖ ;9ЯектронНОГо усилителя 18 с вяэа;н С реверсивным электродвйгатё лем 15. .кгнал на оВрабОтку полЬжё нйя упора пёрекЛючёнйя распрёделителя б поступает от конечных выключателей 25 и 26 . На чертеже подвижные части 4 пока заНй в верхнем положении, аккумулятор-дозатор 9 заряжен и пориень 10 упирается в упор 12, мостовая схема сбалансирована. Система управления работает следу ющйм Ьбразом. ----- -----;- При11ШШсёний первого удар-Ж Вёрйи сигнал от кнопки или педали подается На открытые распределители 6. ПорШен 10 аккумулятора-дозатора 9 под дей .ствием давления газовойсрёдЁз движет ЙявНй з,вйтёсняя жидкость из полост аккумулятора 9 в рабочий гидроцилинд 1.--В это время шаговый искательс дв - комайЙГ-от-кШ|ё«Гб1 0 вы ключателя 25 , такты 23 и 24 в ,при КбтО ром качестве плёЧГ 1Г йОегё -йспЬйьзу ет;СЯ резистор 20. 7 Поло:жёнйё подвижногб конта кта рё зистора 26 oпpёдёляeт п6явйвшйЙcя pa 6aJi;fHt:;Жic;тaг и йес1 гсЗмпёнсировайное н ф1 ёниёV ffOCT упаюШё 1на вхсШ элёкт ронно-го усилителя 18. ,. ;----у,5 дц-щ2й;1;;тйгнет ЪШ вёрси;вный двигатель 15 для отработки реохорда IT, прй котбром мост ёуЙёт; сбалансирован.: Упор 12 эс(яимаёт нО|оёПблсЗжёйИе соответствии с программой Нанесения Швдр)Щёго-у;с(жда 15ёрШ ег--|ШНёред эаданной энергией. . Аккумулятор-дозатор 9 полностью разряжается, а доза выданной жидкост высокого давления в рабочий гидроцииндр 1 определяет энергию, с котоой будет нанесен удар.. После удара от конечного выключаеля 26 поступает сигнал на переклюение распределителя 6. Он соединяет оршневую полость рабочего цилиндра со сливом и запирает напорную магитраль. Происходит зарядка аккумуляора-дозатора 9. При этом упор 12 заимает новое положение согласно прорамме нанесения ударов серии. Подъем одвижных частей 4 после удара происодит подачей жидкости от аккумулятоа 5 возвратного хода в штоковую поость гидроцилиндра 1 и слива жидкоси из поршневой полости через распреелитель 6 в сливной бак 7. При подходе к верхнему положению одвижные части 4 воздействуют на конечный выключатель 25. Сигнал от него подает команду на Переключение распределителя бис задержкой времени на переключение полей шагового искателя в новое прложение согласно программе нанесения ударов серии. Распределитель 6 перекрывает сливную магистраль и открывает напорную, происходит слёдукядий удар. Величину энергии ударов устанавливают настройкой переменных резисторов 19, 20 и 21, а число различных значений энергий определяют количеством этих резисторов. Экономический эффект от внедрения системы управления обуславливается повышением точности и возможностью автоматического регулирования величины энергии каждого из серии ударов молота. Формула изобретения Система управления штамповочным молотом, содержащая гидравлический цилиндр привода подвижных частей молота , штоковая полость которого соединена с аккумулятором возвратного хода, а .поршневай через гидрораспределитель - со сливным баком, насосной установкой И аккумулятором-дозатором, порШёнь которого соединен с винтом, кинематически связанным с приводной гайкой, отличаюJ4 а я с я тем, что, с целью повышения точносЛй дозирования энергии и повышения надежности, она снабжена шаговым искателем с двумя поляШ, y M TerteM, реохордом и переменньв и резисторами, причем подвижный КШПгаКтрёохорда закреплен на упомянутом винте и электрически связан с входом усилителя, а выход последнего соединен с приводом гайки. Источники информации,, принятые во внимание при экспертизе 1. Патент ФРГ 1527209, кл. В 21 7 7/20, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод штамповочного молота | 1977 |
|
SU660767A1 |
| Система управления гидравлического штамповочного молота | 1975 |
|
SU546419A1 |
| Гидропривод штамповочного молота | 1977 |
|
SU695757A1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2334583C2 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2409446C1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Гидравлический привод штамповочного молота | 1989 |
|
SU1682024A1 |
| КОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2005 |
|
RU2327542C2 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВИЛИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2574623C1 |