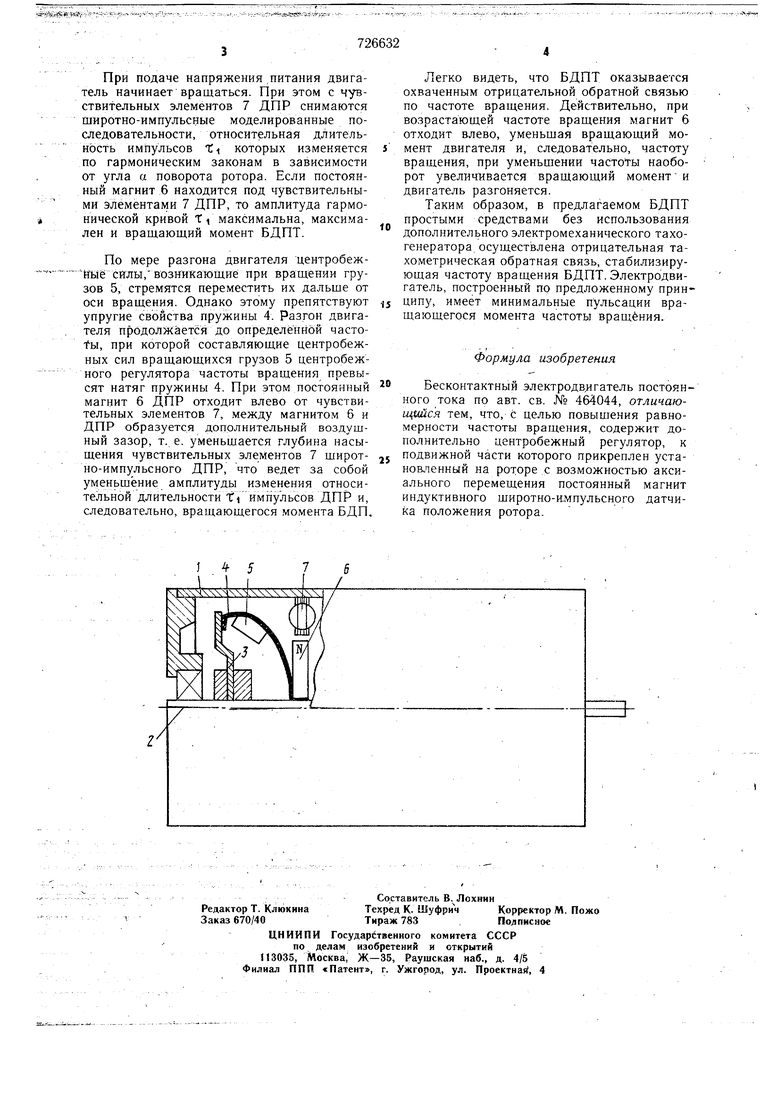
(54) БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА При подаче напряжения питания двигатель начинает вращаться. При этом с чувствительных элементов 7 ДПР снимаются широтно-импульсные моделированные последовательности, относительная длительность импульсов t которых изменяется по гармоническим законам в зависимости от угла а поворота ротора. Если постоянный магнит 6 находится под чувствительными элементами 7 ДПР, то амплитуда гармонической кривой Т 1 максимальна, максимален и вращающий момент БДПТ. По мере разгона двигателя центробеж Шё СИЛЫ,возникающие при вращении грузов 5, стремятся переместить их дальше от оси вращения. Однако этому препятствуют упругие свойства пружины 4. Разгон двигателя продолжается до определённой частоtbi, при которой составляющие центробежных сил вращающихся грузов 5 центробежного регулятора частоты вращения превысят натяг пружины 4. При этом постоянный магнит 6 ДПР отходит влево от чувствительных элементов 7, между магнитом 6 и ДПР образуется дополнительный воздушный зазор, т. е. уменьшается глубина насыщения чувствительных элементов 7 щиротно-импульсного ДПР, что ведет за собой уменьшение амплитуды изменения относительной длительности тГ импульсов ДПР и, следовательно, вращающегося момента БДП. Легко видеть, что БДПТ оказывается охваченным отрицательной обратной связью по частоте вращения. Действительно, при возрастающей частоте вращения магнит 6 отходит влево, уменьщая вращающий момент двигателя и, следовательно, частоту вращения, при уменьшении частоты наоборот увеличивается вращающий момент и двигатель разгоняется. Таким образом, в предлагаемом БДПТ простыми средствами без использования дополнительного электромеханического тахогенератора, осуществлена отрицательная тахометрическая обратная связь, стабилизирующая частоту вращения БДПТ. Электродвигатель, построенный по предложенному принципу, имеет минимальные пульсации вращающегося момента частоты вращения. Формула изобретения Бесконтактный электродв 1гатель постоянного тока по авт. св. № 464044, отличающийся тем, что, с целью повышения равномерности частоты вращения, содержит дополнительно центробежный регулятор, к подвижной части которого прикреплен установленный на роторе с возможностью аксиального перемещения постоянный магнит индуктивного щиротно-и-мпульсного датчика положения ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Бесконтактный привод постоянного тока | 1975 |
|
SU655037A1 |
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Бесконтактный электродвигатель постоянного тока | 1974 |
|
SU600669A2 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Бесконтактный тахогенератор | 1975 |
|
SU551563A1 |
| Вентильный электродвигатель | 1976 |
|
SU647806A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Вентильный электродвигатель | 1979 |
|
SU790079A1 |
