1
f
Изобретение относится к области бу рения, освоения и ремонта нефтяных и газовых скважин, а именно, к устройствам для проведения спуско-подъемных операций с трубами и штaнгa fIи, имеющими муфты, при бурении . и ремонте; скважин.
Известны автоматические элеваторы, в которых захват труб осуществляется кулачками, перемещающимися в на- наклонных пазах корпуса элеватора ij. Привод кулачков осуществляется сложны ми рычажными механи змами.
Такие элеваторы ненадежны в работе и сложны в устройстве, так как механизм, привод5пций в движение кулачки, состоит из множества сопряженных подвижных элементов, требующих точного изготовления.
Наиболее близким по конструкции является автоматический элеватор 2J.
Перемещение кулачков в положение захвата осуществляется сильфонами, а перемещение кулачков в положение скоя
бодного прохода трубы вдоль оси элеватора - плоскими пружинами, при этом в сильфоны подается воздух (жидкость).
Недостатком конструкции является то, что она сложна и ненадежна, так как надежность и долговечность сильфонов недостаточно велика и, ввиду отсутствия механизма синхронизации перемещения сильфонов, разной жесткости сильфонов и плоских пружин, возможен в процессе работы перекос исполнительного элемента привода и, как следствие, заклинивание элеватора.
Целью настоящего изобретения является упрощение конструкции автоматического элеватора.
Для достижения этой цели в элеваторе кольцо выполнено с наклонными пазами на боковой поверхности, а кулачки шарнирно связаны с корпусом и снабжены пальцами со сферическими головками, расположенными в паоах кольца.
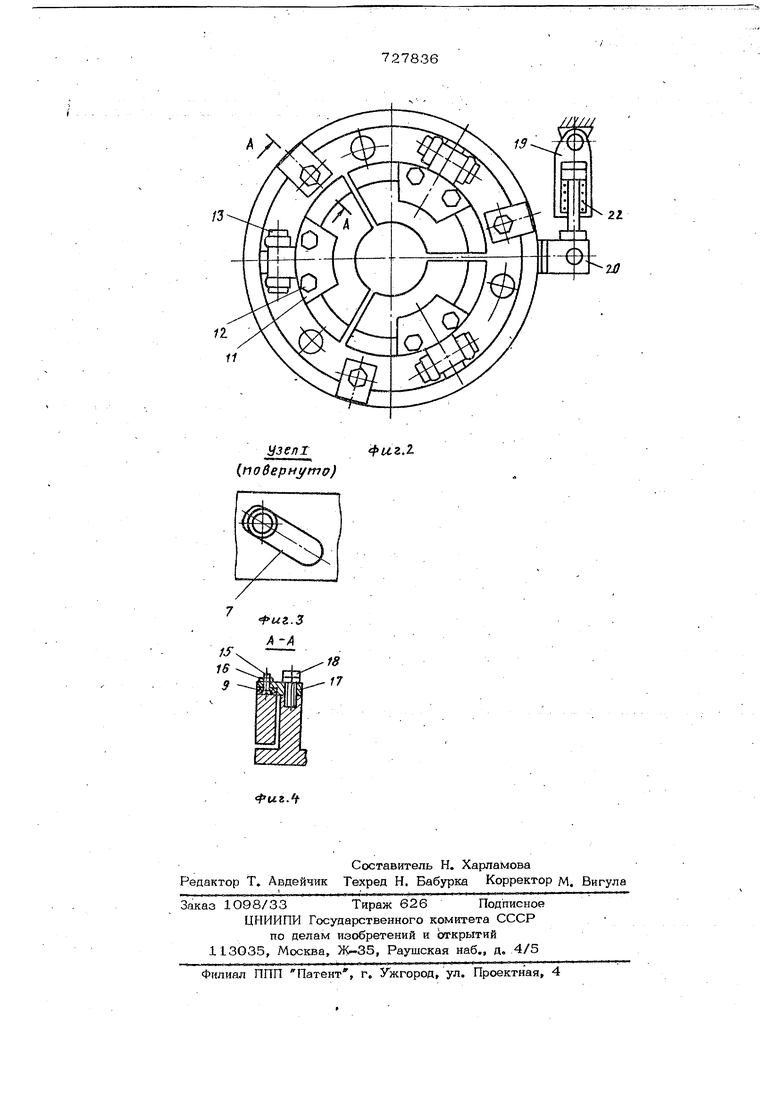
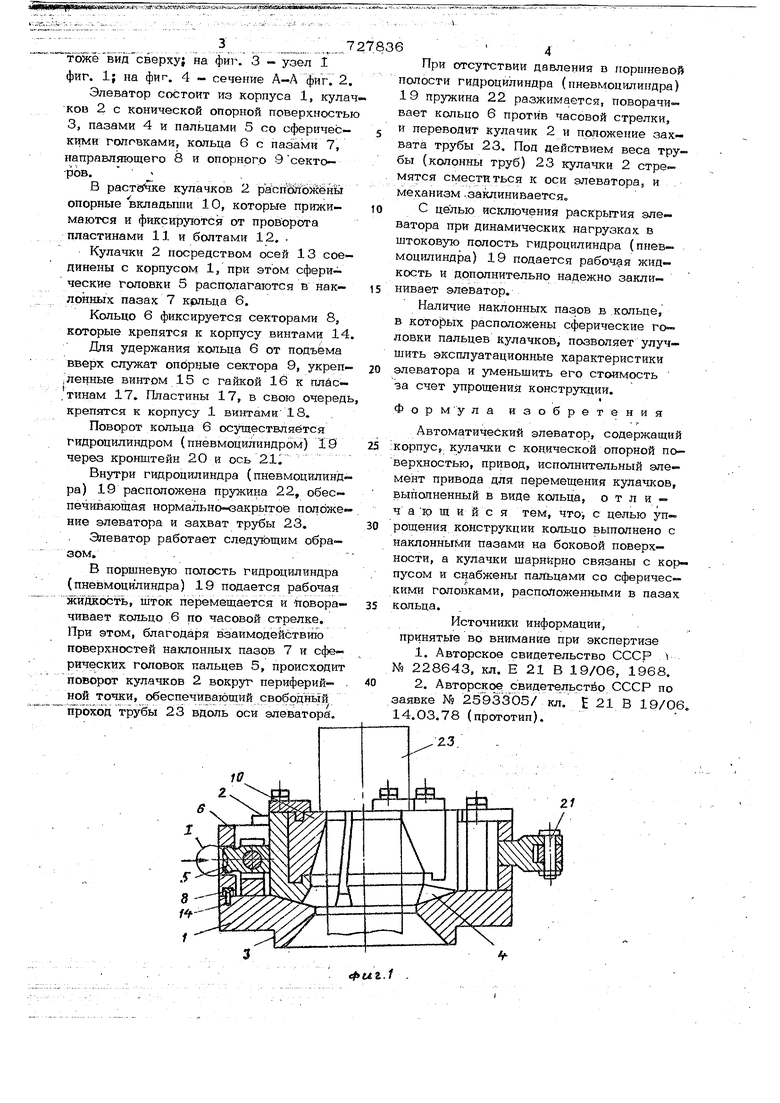
На фиг. 1 - общий вид ,чвток ат1Ттского элеватора в рапреле| на фиг. 2 - тоже вид сверху на фит. 3 - узел 1 фиг, 1; на фиг. 4 - сечение А-А фиг. 2, Элеватор состоит из корпуса 1, кула ков 2 с конической опорной поверхность 3, пазами 4 и пальцами 5 со сферичес- кими голгвками, кольца 6 с пазами 7, направляющего 8 и опорного 9 секто- ров. J В растейке кулачков 2 рйсйШожёны опорные вкладыши 10, которые прижимаются и фиксируются от проворота пластинами 11 и болтами 12. . Кулачки 2 посредством осей 13 соединены с корпусом 1, при этом сферические головки 5 располагаются в нак- лонных пазах 7 крльца 6. Кольцо 6 фиксируется секторами 8, которые крепятся к корпусу винтами 14 Для удержания кольца б от подъема вверх служат опорные сектора 9, укреп ленные винтом 15 с гайкой 16 к плас ,тинам 17. Пластины 17, в свою очеред крепятся к корпусу 1 винтами 18. Поворот кольца 6 осуществляется гидроцилиндром (пневмоцилиндром) 19 через кронштейн 20 и ось 21. Внутри гидроцилиндра (пневмоцилинд ра) 19 расположена пружина 22, обеспечивающая нормально-закрытое положе ние элеватора и захват трубы 23, еватор работает следующим образом.. В поршневую полость гидроцилиндра (пневмоцилиндра) 19 подается рабочая жй йкость, шток перемещается и Ловора- чивает кольцо 6 nio часовой стрелке. При этом, благодаря взаимодействию поверхностей наклонных пазов 7 и сфе- рических головок пальцев 5, происходит поворот кулачков 2 вокруг периферий- ной точки, обеспечивающий свободный проход трубы 23 вдоль оси элеватора.
727836
Фиг.1 При отсутствии давления в поришевой полости гидроцилиндра (пневмоцилиндра) 19 пружина 22 разжигиается, поворачивает кольцо 6 против часовой стрелки, и переводит кулачик 2 и положение захвата трубы 23. Под действием веса трубы (колонны труб) 23 кулачки 2 стремятся сместиться к оси элеватора, и механизм .заклинивается. С целью исключения раскрытия элеватора при динамических нагрузках в штоковую полость гидроцилиндра (пнев моцилиндра) 19 подается рабочая жидкость и дополнительно надежно заклинивает элеватор. Наличие наклонных пазов в кольце, в которых расположены сферические головки пальцев кулачков, позволяет улучшить эксплуатационные характеристики элеватора и уменьшить его стоимость за счет упрощения конструкции. Формула изобретения Автоматический элеватор, содержащий :корпус, кулачки с конической опорной по- верхностью, привод, исполнительный элемент привода для перемещения кулачков, выполненный в виде кольца, о т л и - ч ато щ и И с я тем, что , с целью упрощения конструкции кольцо выполнено с наклонными пазами на боковой поверхности, а кулачки щарнкрно связаны с корпусом и С1|абжены пальцами со сферичес- кими головками, расположенными в пазах кольца. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР V № 228643, кл. Е 21 В 19/О6, 1968. 2.Авторское свидетельство СССР по заявке № 25 931305/ кл. Е 21 В 19/06. 14.ОЗ.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический элеватор | 1981 |
|
SU996716A1 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ДВУХШТРОПНЫЙ | 2023 |
|
RU2816608C1 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ | 2022 |
|
RU2794051C1 |
| ЭЛЕВАТОР ТРУБНЫЙ | 1998 |
|
RU2143538C1 |
| Перегрузочная система | 1986 |
|
SU1472413A1 |
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107146C1 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ | 2024 |
|
RU2830718C1 |
| Элеватор для спуска и подъема бурильных труб | 1981 |
|
SU1016477A2 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ | 2023 |
|
RU2810658C1 |
| УСТРОЙСТВО ДЛЯ КЛЕЙМЕНИЯ ПРОКАТА | 1993 |
|
RU2086325C1 |