1
Изобретение относится к подъемно-тран- спортному машиностроению, а именно к грузозахватным устройствам.
Цель изобретения - расширение эксплуатационных возможностей системы путем обеспечения захвата тяжелых изделий.
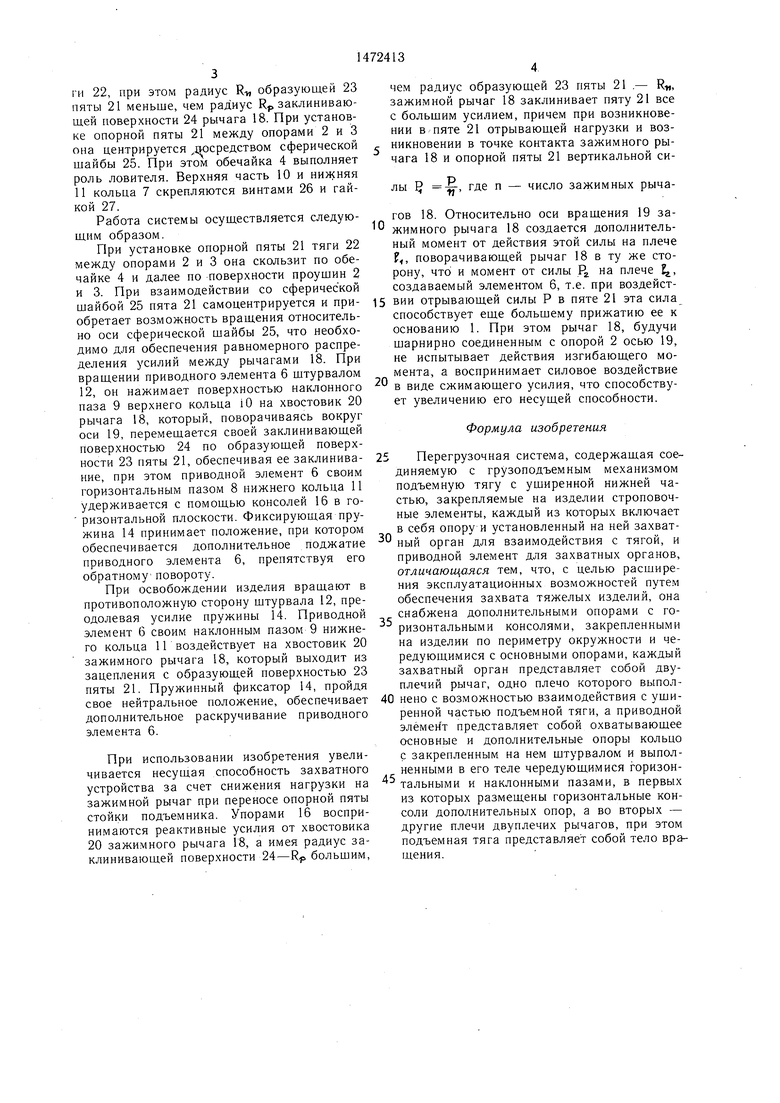
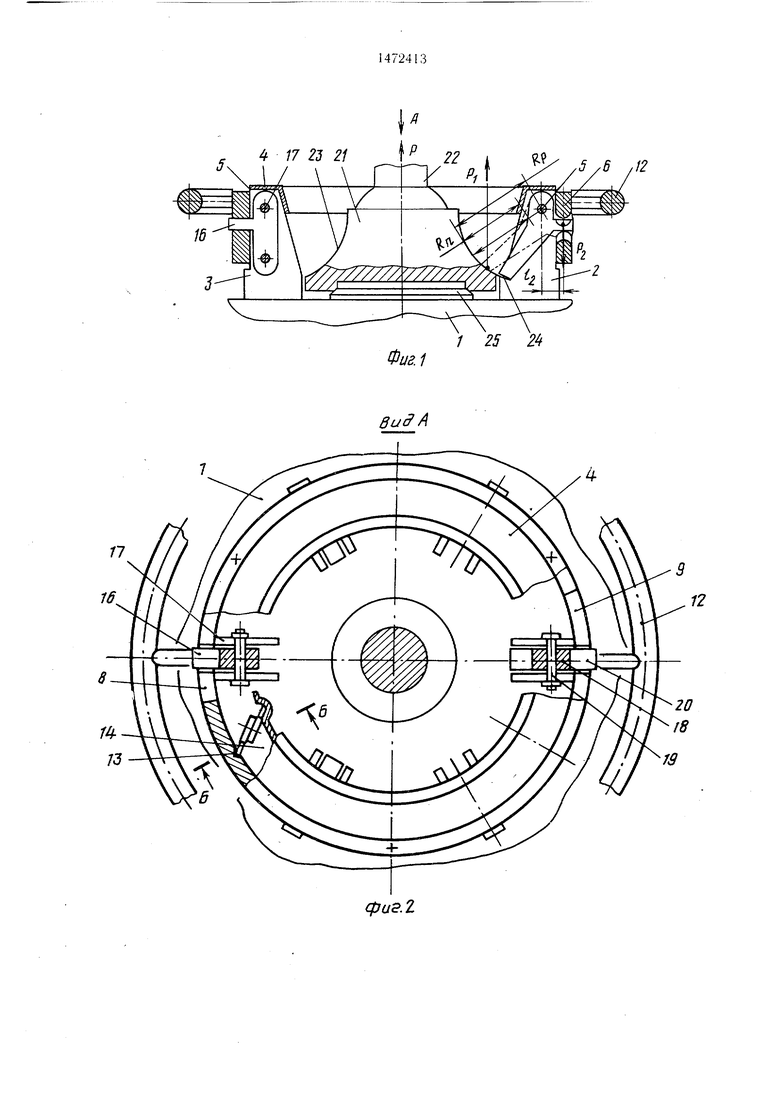
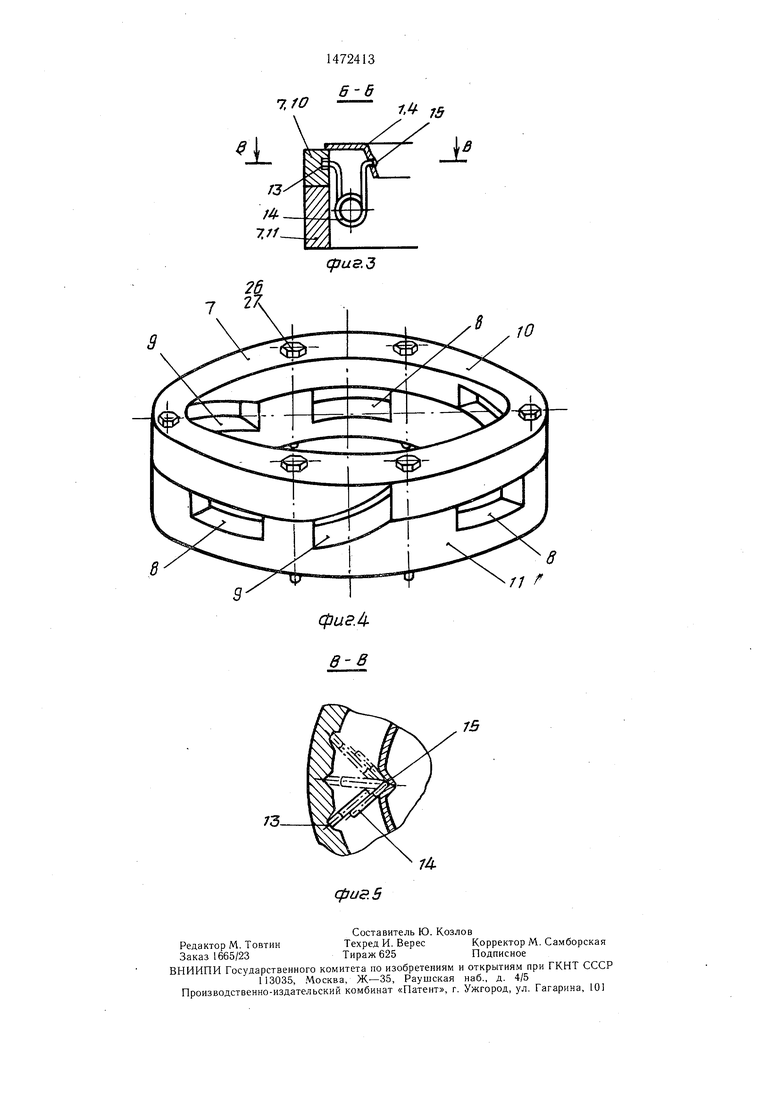
На фиг. 1 изображена система, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - кольцо в сборе; на фиг. 5 - разрез В-В на фиг. 3.
Перегрузочн-ая система содержит основание 1 поднимаемого изделия, на котором равномерно по окружности закреплены строповочные элементы в виде опор 2 и дополнительные опоры 3, соединенные в верхней части обечайкой 4. Опоры 2 и 3 расположены концентрично относительно оси симметрии изделия и своими наружными поверхностями 5 сопрягаются с приводным-элементом 6, выполненным в виде кольца 7 с чере- дуюшимися горизонтальными пазами 8 и
наклонными пазами 9. Кольцо 7 состоит из двух частей: верхней 10 и нижней II. К верхней части 10 кольца 7 приварен штурвал 12 и в ней со смещением на 120° выполнены установочные отверстия 13 для трех пружинных фиксаторов 14 положения приводного элемента 6. С противоположной стороны пружинный фиксатор 14 установлен в углублениях 15 обечайки 4 основания 1.
Приводной элемент 6 своими горизонтальными пазами 8 посажен на консоли 16, закрепленные на опорах 3 посредством пальцев 17. В наклонных пазах 9 приводного элемента 6 установлены поворотные двуплечие рычаги 18, которые установлены на опорах 2 посредством осей 19. Возможность вращения рычага 18 вокруг оси 19 при вращении штурвала 12 приводного элемента 6 обеспечивается воздействием нажимного элемента 6 на хвостовик 20 рычага 18, размещенного в наклонном пазу 9. Рычаги 18 взаимодействуют с опорной пятой 21 подъемной тя4 Ю
СО
ги 22, при этом радиус R образующей 23 пяты 21 меньше, чем радиус Rp заклинивающей поверхности 24 рычага 18. При установке опорной пяты 21 между опорами 2 и 3 она центрируется посредством сферической щайбы 25. При этом обечайка 4 выполняет роль ловителя. Верхняя часть 10 и нижня я 11 кольца 7 скрепляются винтами 26 и гайкой 27.
Работа системы осуществляется следующим образом.
При установке опорной пяты 21 тяги 22 между опорами 2 и 3 она скользит по обечайке 4 и далее по поверхности проущин 2 и 3. При взаимодействии со сферичес кой щайбой 25 пята 21 самоцентрируется и приобретает возможность вращения относительно оси сферической щайбы 25, что необходимо для обеспечения равномерного распределения усилий между рычагами 18. При вращении приводного элемента 6 щтурвалом
чем радиус образующей 23 пяты 21 ,- R,, зажимной рычаг 18 заклинивает пяту 21 все с больщим усилием, причем при возникновении в пяте 21 отрывающей нагрузки и возникновении в точке контакта зажимного рычага 18 и опорной пяты 21 вертикальной силы 13 -2., где п - число зажимных рычагов 18. Относительно оси вращения 19 за жимного рычага 18 создается дополнительный момент от действия этой силы на плече F,, поворачивающей рычаг 18 в ту же сторону, что и момент от силы Р на плече , создаваемый элементом 6, т.е. при воздейст 5 ВИИ отрывающей силы Р в пяте 21 эта сила способствует еще большему прижатию ее к основанию 1. При этом рычаг 18, будучи щарнирно соединенным с опорой 2 осью 19, не испытывает действия изгибающего момента, а воспринимает силовое воздействие
IVlCrliu. а DWVllLyrllllllTlC-Hw-l fIlill Jl J- ij/j, IV- I
12, он нажимает поверхностью наклонного 0 в виде сжимающего усилия, что способству- па за 9 верхнего кольца iO на хвостовик 20 рычага 18, который, поворачиваясь вокруг оси 19, перемещается своей заклинивающей поверхностью 24 по образующей поверхет увеличению его несущей способности. Формула изобретения
ности 23 пяты 21, обеспечивая ее заклинивание, при этом приводной элемент 6 своим горизонтальным пазом 8 нижнего кольца 11 удерживается с помощью консолей 16 в го ризонтальной плоскости. Фиксирующая пружина 14 принимает положение, при котором обеспечивается дополнительное поджатие приводного элемента 6, препятствуя его обратному повороту.
При освобождении изделия вращают в противоположную сторону штурвала 12, npej одолевая усилие пружины 14. Приводной элемент 6 своим наклонным пазом 9 нижнего кольца 11 воздействует на хвостовик 20
зажимного рычага 18, который выходит из зацепления с образующей поверхностью 23 пяты 21. Пружинный фиксатор 14, пройдя
30
35
Перегрузочная система, содержащая соединяемую с грузоподъемным механизмом подъемную тягу с уширенной нижней частью, закрепляемые на изделии строповоч- ные элементы, каждый из которых включает в себя опору и установленный на ней захватный орган для взаимодействия с тягой, и приводной элемент для захватных органов, отличающаяся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата тяжелых изделий, она снабжена дополнительными опорами с горизонтальными консолями, закрепленными на изделии по периметру окружности и чередующимися с основными опорами, каждый захватный орган представляет собой двуплечий рычаг, одно плечо которого выполllnlDl Л..1. t- j .. -) f --i свое нейтральное положение, обеспечивает 40 нено с возможностью взаимодействия с ущи
,л.л11 Л1 11тллч тчт/- гтг- тп аилиг глтсгР1Д ЗГГГЛГЛРГ ЛИОН
дополнительное элемента 6.
раскручивание приводного
репной частью подъемной тяги, а приводной элемент представляет собой охватывающее основные и дополнительные опоры кольцо с закрепленным на нем щтурвалом и выполненными в его теле чередующимися горизонтальными и наклонными пазами, в первых из которых размещены горизонтальные консоли дополнительных опор, а во вторых - другие плечи двуплечих рычагов, при этом подъемная тяга представляет собой тело вра щения.
При использовании изобретения увеличивается несущая способность захватного устройства за счет снижения нагруз ки на зажимной рычаг при переносе опорной пяты стойки подъемника. Упорами 16 воспринимаются реактивные усилия от хвостовика 20 зажимного рычага 18, а имея радиус заклинивающей поверхности 24 -RP большим.
чем радиус образующей 23 пяты 21 ,- R,, зажимной рычаг 18 заклинивает пяту 21 все с больщим усилием, причем при возникновении в пяте 21 отрывающей нагрузки и возникновении в точке контакта зажимного рычага 18 и опорной пяты 21 вертикальной силы 13 -2., где п - число зажимных рычагов 18. Относительно оси вращения 19 за жимного рычага 18 создается дополнительный момент от действия этой силы на плече F,, поворачивающей рычаг 18 в ту же сторону, что и момент от силы Р на плече , создаваемый элементом 6, т.е. при воздейст5 ВИИ отрывающей силы Р в пяте 21 эта сила способствует еще большему прижатию ее к основанию 1. При этом рычаг 18, будучи щарнирно соединенным с опорой 2 осью 19, не испытывает действия изгибающего момента, а воспринимает силовое воздействие
IVlCrliu. а DWVllLyrllllllTlC-Hw-l fIlill Jl J- ij/j, IV- I
0 в виде сжимающего усилия, что способству-
в виде сжимающего усилия, что способств
ет увеличению его несущей способности. Формула изобретения
0 в виде сжимающего усилия, что способству-
0
5
Перегрузочная система, содержащая соединяемую с грузоподъемным механизмом подъемную тягу с уширенной нижней частью, закрепляемые на изделии строповоч- ные элементы, каждый из которых включает в себя опору и установленный на ней захватный орган для взаимодействия с тягой, и приводной элемент для захватных органов, отличающаяся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата тяжелых изделий, она снабжена дополнительными опорами с горизонтальными консолями, закрепленными на изделии по периметру окружности и чередующимися с основными опорами, каждый захватный орган представляет собой двуплечий рычаг, одно плечо которого выполi 40 нено с возможностью взаимодействия с ущи
,л.л11 Л1 11тллч тчт/- гтг- тп аилиг глтсгР1Д ЗГГГЛГЛРГ ЛИОН
45
репной частью подъемной тяги, а приводной элемент представляет собой охватывающее основные и дополнительные опоры кольцо с закрепленным на нем щтурвалом и выполненными в его теле чередующимися горизонтальными и наклонными пазами, в первых из которых размещены горизонтальные консоли дополнительных опор, а во вторых - другие плечи двуплечих рычагов, при этом подъемная тяга представляет собой тело вращения.
и
Фиг.1
2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Устройство для подъема длинномерной конструкции в вертикальное положение | 1985 |
|
SU1291542A1 |
| Захват механической руки для пере-МЕщЕНия пОлыХ КОРпуСНыХ издЕлий | 1979 |
|
SU812570A1 |
| Захват для группы грузов | 1988 |
|
SU1546406A1 |
| УСТРОЙСТВО КАРУСЕЛЬНОЕ ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1992 |
|
RU2014370C1 |
| Захватное устройство для цилиндрических длинномерных изделий | 1986 |
|
SU1440842A1 |
| Устройство для захвата труб | 1972 |
|
SU746080A1 |
| ПРИВОД РУЧНОГО ТОРМОЗА для ЖЕЛЕЗНОДОРОЖНОГО подвижного СОСТАВА | 1972 |
|
SU346163A1 |
| Переносной токарный станок для обработки концов труб | 1989 |
|
SU1710193A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к грузозахватным устройствам. Целью изобретения является расширение эксплуатационных возможностей. Перегрузочная система содержит закрепляемые на грузе строповочные опоры 2 и промежуточные опоры 3 с консолями 16. Опоры охватывают приводное кольцо с наклонными и горизонтальными пазами и штурвалом 12. В горизонтальных пазах установлены консоли 16, а в наклонных - хвостовики 20 зажимных рычагов 24. С грузоподъемным механизмом соединена подъемная тяга 22 с опорной пятой 21. При повороте штурвала 12 пята 21 зажимается рычагами и удерживается в этом состоянии при подъеме груза. Система обеспечивает подъем тяжелых грузов при относительно небольшой массе самого устройства. 5 ил.
11
Buff А
4
J9
Фиэ.г
gjus.3
фигЛ
фиг 5
Составитель Ю. Козлов Техред И. ВересКорректор М. Самборская
.,Тираж 625Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат «Патент, г. Ужгород, ул. Гагарина, 101
Редактор М. Товтин Заказ 1665/23
8
10
в
11
| Сцепное устройство | 1980 |
|
SU1009971A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
