1
Изобретение относится к металлургической, машиностроительной и другим отраслям промышленности , в которых применяются регулируемые вентильные электроприводы, работающие с периодической нагрузкой на валу. Подобные электроприводы распространены на прокатных станах, кузнечно-прессовых машинах, машинах непрерывного литья стальных заготовок и т.д.
По технологическим требованиям заданная скорость электропривода на указанных механизмах должна поддерживаться с высокой точностью, несмотря на периодические возмущения на валу с частотой 1-3 и бо- , лее Гц.
Известны вентильные электроприводы, в которых дпя поддержания скорости на заданном уровне используется ,двукратно интегрирующая система подчиненного регулирования с последовательно включенными регуляторами скорости и тока 1.
Однако при периодических возмущениях на валу двигателя в таких системах возникаиот значительные вынужденные колебания скорости, существенно увеличивающиеся с ростом
угловой частоты возмущающего момента до SJ. J- ,
с. т
где Тт - постоянная времени интег5рирования контура тока.
Применяемый в известной системе электропривода принцип регулирования по отклонению в условиях циклически изменяющейся нагрузки (с
10 частотой 1-3 и более Гц) не может обеспечить требуемую точность стабилизации скорости.
Наиболее :близким к изобретению по технической сущности является
15 известный вентильный электропривод, содержащий тиристорный преобразователь, двигатель постоянного тока,, приводящий через эксцентрик механизм, систему подчиненного регулирования с регуляторами и датчиками скорости и тока:, сельсинный преобразователь угла поворота эксцентрика в гармонический сигнал, связанный с регулятором тока 2.
25 . Недостатки этого с лектропривода заключаются в том, что ,он работает со стабильной скоростью лишь при пульсирующем моменте на вашу , изменяющемся по закону Мс
30 Йг + MBS riSit. , и не может эффек-.
тивно подавлять колебания скорости при ступенчатом, пилообразном и др, графиках нагрузки на валу. Кроме того, в известном электроприводе с изменением частоты возмущения необходимо вручную подстраивать фазу компенсирующего сигнала.
Цель изобретения - уменьшение вынужденных колебаний скорости и тока якоря электродвигателя, Поставленная цель достигается тек, что в вентильный электропривод, содержащий электродвигатель, подключенный к вентильному преобразователю с системой управления, выполненной по принципу подчиненного регулирования с последовательно включенными задатчиком скорости,регуляторами скорости и тока якоря и датчиками скорости и тока якоря, соединенными с входами соответствующих регуляторов, введены генератор периодических сигнашов и последовательно включенные блок расчета среднеквадратичного значения отклонения скорости, анализатор колебаний параметров электропривода и блок самонастройки фазы и формы сигналов генератора, при этом выход упомянутого блока самонастройки соединен с входом генератора периодических сигналов, входы анализатора колебаний связаны с датчиками скорости и тока электродвигателя, входные цепи блока расчета среднеквадратичного значения отклонения скорости соединены с задатчиком и датчиком скорости, а выход генератора периодических сигналов подключен к дополнительному входу регулятора тока якоря двигателя.
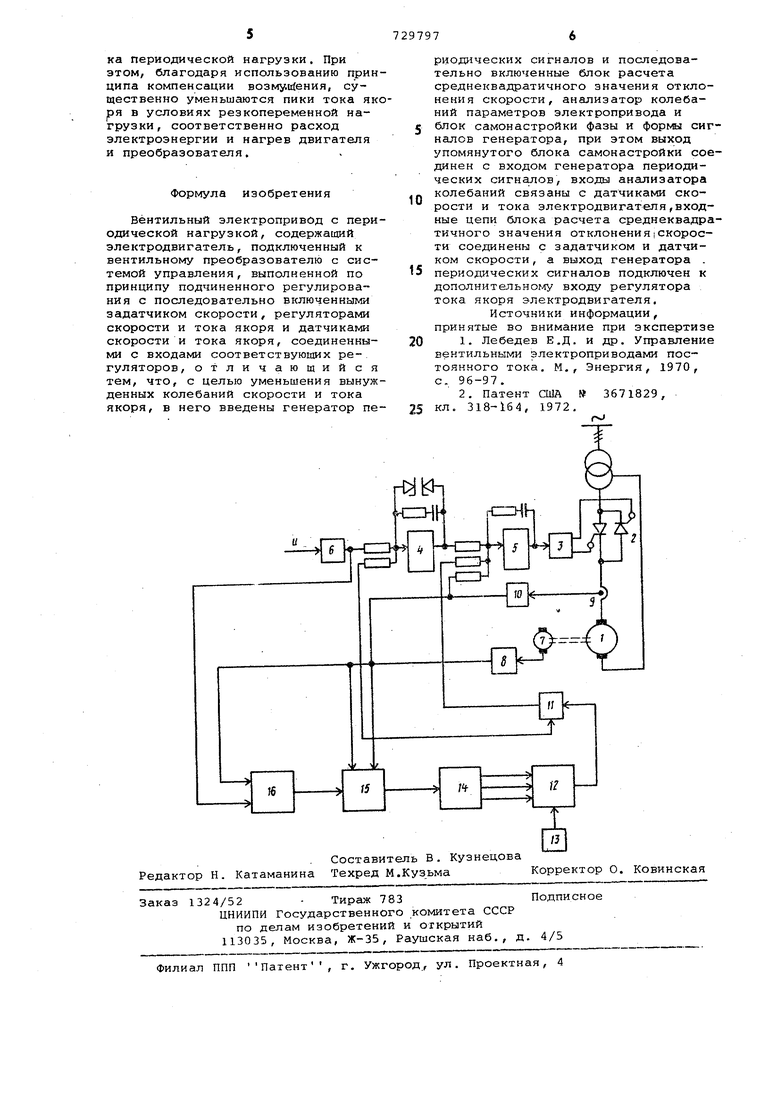
На ч.ертеже дана принципиальная схема вентильного электропривода.
Вентильный электропривод содержит электродвигатель 1, питающийся от тиристорного преобразователя 2, имеющего систет«1у фазо-вого управления 3, Система подчиненного регулирования состоит из регулятора 4 скорости, регулятора 5 тока якоря, задатчика б скорости, обратные связи осуществлены с помощью измерите ля скорости, например, тахогенератора 7, датчика 8 скорости, измерителя 9 тока и датчика 10 тока.
Регулятор 5 тока имеет дополнительный вход, на который через пороговый коммутирующий элемент 11 гЮдается сигнал от генератора 12 периодических сигналов. Генератор 12 имеет блок 13 ручной настройки частоты, формы, амплитуды, длительности и фазы ёыходного напряжения, а также блок 14 самонастройки фазы и формы сигналов генератора с автоматическим поиском, связанный чере анализатор 15 колебаний параметров электропривода с блоком 16 расчета
среднеквадратичного значения отклонения скорости.
Входы блока 16 соединены с задатчиком 6 и датчиком 8 скорости, ,На входы анализатора 15 подаются также сигнсшы датчиков 10 тока и скорости 8 двигателя 1.
Пороговый элемент 11 управляется сигналом датчика 8 скорости.
Электропривод работает следующим образом.
После подачи сигнала от задатчика б скорости на вход регулятора 4 скорости осуществляется пуск электродвигателя 1. Оптимальный характер переходных процессов пуска и торможения обеспечивается настройкой системы регулирования по симметричному оптимуму . Пропорционально-интегральный регулятор у скорости обусловливает нулевой статизм относительно постоянной составляющей момента на валу привода.
После окончания пуска срабатывает пороговый коммутирующий элемент
11,подключая генератор 12 периодических сигналов к дополнительному входу регулятора 5 тока, В зависимости от вида нагрузки форма периодического сигнала задается блоком
13Настройки, Этот блок может использоваться также для установки частоты, скважности и амплитуды периодических сигналов.
В автоматическом режиме указанные параметры определяются блоком
14самонастройки с автоматическим поиском и анализатором 15, которые получают информацию о среднеквадратичном отклонении скорости от блока 16 расчета указанной величины,
а также о текущих значениях тока и скорости от выходных датчиков 10 и 8 измерителя тока 9 и тахогенератора 7.
Информация от датчиков 8 и 10 используется для определения частоты периодических сигналов генератора 12 (как правило, пропорциональной скорости двигателя 1) и амплитуды этих сигналов, зависящей от величины момента нагрузки на валу, рассчитываемого по полному току якоря и его динамической составляющей,
Влок 14 самонастройки осуществляет автоматический поиск фазы и находит оптимальную амплитуду и форму выходного напряжения генератора
12,которые обеспечивают создание необходимой компенсирующей периодической составляющей в кривой напряжения тиристорного преобразователя
2 и минимизацию среднеквадратичной ошибки регулирования, рассчитываемой блоком 16.
Преимущества вентильного электропривода заклюгаются в автоматическом поддержании стабильной скорости вращения при различных видах графи
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1981 |
|
SU985915A1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2101844C1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU974535A1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Устройство управления электроприводом обжимного реверсивного прокатного стана | 1976 |
|
SU671890A1 |
| Электропривод постоянного тока | 1971 |
|
SU555525A1 |
