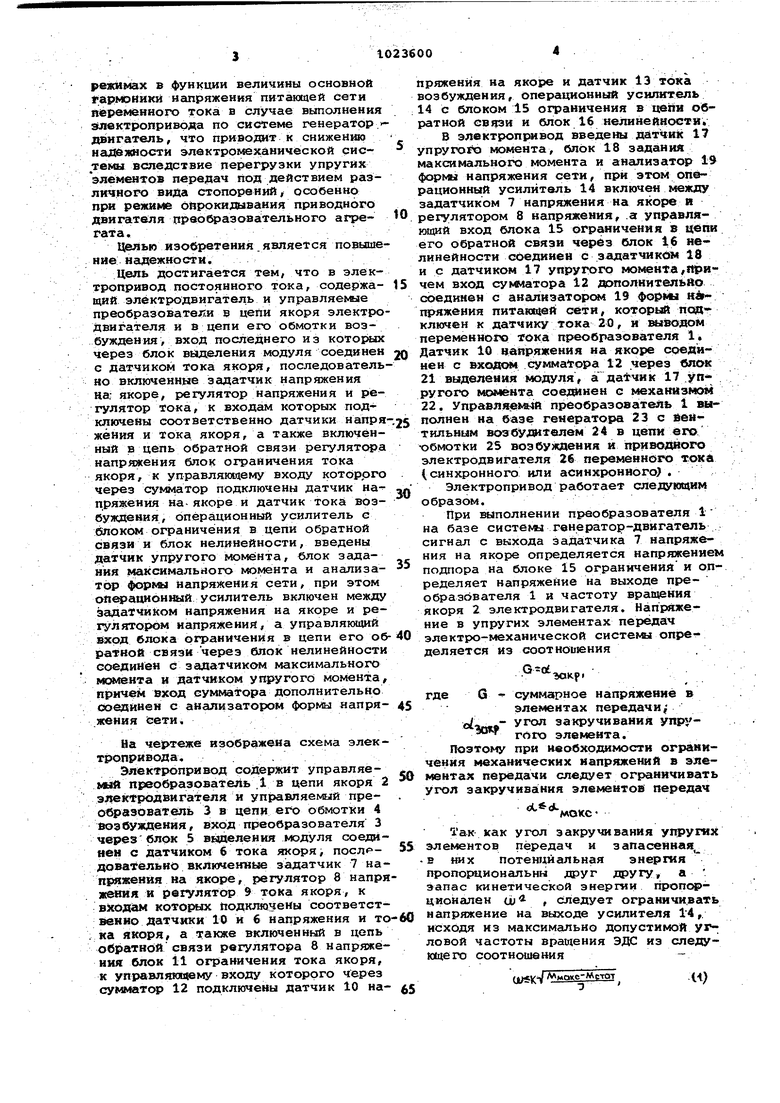
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями п стоянного тока в приводе механизмов которые в силу особенностей своей работы могут испытывать частые стопорения, например механизм экскават ра при столкновении ковша с непреод лимыми препятствиями. При .этом элек тропривод выполняется по системе ге нератор- двигатель или тиристорный преобразователь - двигатель Высокое быстродействие и надежность современного электропривода могут быть получены при полном учете всех его инерциоиностей и осо бых требований к ограничению его ре жимов. Известен электропривод постоянного тока, содержащий блок регулируемого ограничения тока якоря в цепи управления преобразователем якорной цепи, к управляющему входу которого подключен выход датчика тока якоря В этом электроприводе уставку токоограничения изменяют в функции величины тока якоря, в результате чего несколько уменьшаются динамические усилия в механизмах, электроприводы которых выполнены на базе систекы генератор-двигатель, однако при этом не учитываются коммутационные ограни чения режимов электродвигателя,состояние питающей сети, а такзке режим перед стопоренивм, что в значительно степени отрицательно сказывается на надежности и быстродействии электромеханической систекы. Известен также электропривод, в котором сравнивается сигнал, задгиощий допустимую наргрузку, с сигналом обратной связи, зависящим от сумлм сигналов тока нагрузки и скорости двигателя, и уменьшается напряжение на выходе преобраэ ователя при превы1иении сигнёшом обратной связи сигнала, задающего допустимую нагрузку. В этом электроприводе сигнал обратной связи, зависящий от сигналов тока нагрузки и заданной скорости, корректируют по условиям обес печения сум1«л динамического и статического момента Г 21. I Недостатками электропривода являются отсутствие учета возможных режимов регулируемого преобразователя переменный ток - постоянный, что Может приводить к полному нарушению тормозного режима, т.е. опрокидывани инвертора при торможении или опрокидыванию приводного электродвигателя преобразовательного агрегата отсутствие учета предельных коммутационных возможностей электродвигателя и генератора; ограничение суммы динамического и статического момента тoльJ:: ко на валу электродвигателя, отсутствие учета режима питающей сети. Известен электропривод постоянного тока с двухзонным регулированием, содержащий задатчик, последовательно включенные ре1;улятор напряжения с ограничителем выходного сигнала в цапи его обратной связи и регулятор тока якоря, регулятор возбуждения, и датчики напряжения, тока якоря и тока возбуждения, подюнгченные к входам соответствунхцИх регуляторов, при этом упомянутый ограничитель через сумматор и блоки нелинейности соединен с датчиком напряжения и через тот же сумматор и блок нелинейности с датчиком тока возбужде 1я, а датчик тока якоря через дополнительно введенный нелинейный блок соединен с входом регулятора тока возбуждения, паргшлельно которому включен ограничитель, вход которого сеязан с датчиком напряжения fsj. Недостатками этого устройства являются отсутствие учета величины напрвжения в упругих элементах механических перещач, которое имеет место в режиме, предшествунядем режиму стопорения, а также необходимость раздельного ограничения мощности приводного двигателя преобразовательного агрегата в тормозшлх и двигательных режимах в функции величины основной гармоники напряжения питающей сети переменного тока. Н аи более близ ким к предл агаемому по технической сущности и достигаемому результату является электропривод постоя«ного тока, содержащий электродвигатель и упрааяяекые преобразователи в цепи якоря электродвигателя и в цепи его обмотки возбуждения, вход последнего из которых через блок выделения модуля соединен с датчиком тока якоря, последовательно включенные задатчик напряжения на якоре, регулятор напряжения и регулятор тока, к 1входам которых подключены соответственно датчики напряжения и тока якоря, а также включенный в цепь обратной связи регулятора напряжения блок ограничения тока якоря, к управляющему входу которого через сумматор подключены датчик напряжения на якоре и датчик тока возбуждения, операционный усилитель с блоком ограиичения в цепи обратной связи и блок нелинейности Однако в известном электроприводе не учитываются необходимость изменения уровня ограничения частоты вращения от напряжения в упругих элементах передач, а также необходимость раздельного ограничения мощности приводного двигателя преобразовательного агрегата в тормозных и двигательн режимах в функции величины основной t apMOвики напряжения питаихдеи сети переменного тока в случае выполнения эглектроприврда по cиcteмe генератор двигатель, что приводит к снижению надежности электромеханической сиетем 1 вследствие перегрузки упругих элементов передач под действием различногчэ вида стопорений, особенно при режиме ойрркидываиия приводного двигателя преобразовательного агрегата. . - :. Целью изобретения.является повыше ние надежности. Цель достигается тем, что в электропривод постоянного тока, содержащий электродвигатель и управляемые преобразователи s цепи якоря электро двигателя и в цепи его обмотки возбуждения, вход последнего из КОТОЕЯЛХ через блок выделения модуля соединен с датчиком тока якоря, последователь но включенные задатчик напряжения на; якоре, регулятор напряжения и регулятор тока, к входс1м которых подключены соответственно датчики напр я жёния и тока якоря, а также включенный в цепь обратной связи регулятора напряжения блок охраничения тока якоря, к управляющему входу которрго через сумматор подключены датчик напряясоиия на-якоре и датчик тока возбуждения, операционный усилитель с блоком ограничения в цепи обратной связи и блок нелинейности, введены датчик упругого момента, блок задания ликсимального момента и анализатор напряжения сети, при этом оп апионный усилитель включен между эадатчиком напряжения на якоре и регулятором напряжений, а управляющий вход блока ограничения в цепи его об ратной связи через блок нелинейности соединен с задатчиком максимального момента и датчиком угфугого момента, причем &ХОД сумматора дополнительно соединен с анализатором формы напряжения йети. На чертеже изображена схема электропривода,.. Электропривод содержит управляемый прео азователь ,1 S цепи якоря 2 элек родвигателя и управляемый преобразователь 3 в цепи его обмотки 4 возбуждения, вход преобразователя 3 черезблок 5 выделения модуля соедаиен с датчиком б тока якоря, послрдоватёльно включенные задатчик 7 напряжения на якоре, регулятор 8 напря жения и регулятор 9 тока якоря, к входам которых йодключены соответственно датчики 10 и 6 напряжения и то ка якоря, а также включенный в цепь о6ратнс)й связи регулятора 8 Напряжения блок 11 ограничения тока якоря, к управляюадму входу которого через 12 подключены датчик 10 напряжения на якоре и датчик 13 тока возбуждения, операционный усилитель 4 с блоком 15 ограничения в цепи обратной связи и блок 16 нелинейносф. В электропривод введены датчик 17 ynpyrotxD момента, блок 18 задания максимального момента и анализатор 19 формы напряжения сети, при этом операционный усилитель 14 включен 1 /южду задатчиком 7 напряжения на якоре и регулятором 8 напряжения, .а управляющий вход блока 15 ограничения s цбпи его обратной связи через блок 16 нелинейности соединен с задатчиком 18 и с датчиком 17 упругого момента,Причем вход сумматора 12 дополни тел bitp соединен с анализатором 19 фор1ви на щ яжения питающей сети, ко-горал подключен к датчику тока 20, и водом переменного тока преобразователя 1, Датчик 10 наНряження на якоре соединен с входюм сУлалаТора 12 через бпеяс 21 выделения модуля, а даТчик 17 упругого момента соединен с механизмом 22. Управляемыми преобразователь 1 выполнен на базе генератора 23с дентильным возбудителем 24 в цепи его обмотки 25 возбуждения и приводиого электродвигателя 26 пере нного тока (синхронного или асинхронного) . Электропривод работает следующим образом. При выполнении преобразователя 1 на базе системы генератор-Двигатель сигнал с выхода задатчика 7 напряжения на якоре определяется напряжением подпора на блоке 15 ограничения и определяет напряжение на выходе преобразователя 1 и частоту вращения якоря 2 электродвигателя. Напряжение в упругих элементах передач электро-механической системы определяется из соотноиюния , где G - сукнчарное напряжение в элементах передачи, закручивания ynpv гого элемента. Поэтому при необходимости ограничення механических напряжений в элементах передачи cneftyer ограничивать угол закручивания элементов передач - -мокс. Так как угол закручивания упругих элементов передач и запасенная, в них потен1дйальная энергия пропорциональны друг другу., а запас кинетической энергии пропорционален U) , следует ограничивать напряжение на выходе усилителя 14,. исходя из максимально допустимой угловой частоты вращения ЭДС из следующего соотношенияи КУ «окс С где M - максимсшьно допустимый момент, передаваеьалй каждым упругим snet HTOMi М г- статический момент в этом же упругом элементе; суммарный приведенный момент инерции, включающий момент инерции электродви гателя и других элементов передач между электродвигателем и данным элементо передачи , Со - допустимая частота вращения электродвигателя, определяемая для каждого элемента передачи. При соблюдении соотношения (1) обеспечивается возможность при самом разном стопорении ограничивать допус тимым уровнем механические нагрузки в упругих элементах передач.Исходная информациядля формирования зависимо ти 11J получается на входе блока 16 нелинейности как разность сигналов на выходе датчика 17 упругого момент и задатчика 18 максимального момента а величина коэффициента К определяет ся как и механизмом, так и возможнос тью рекуперации Части запасенной кинетичеркой энергии электромеханической системы в сеть через преобразова тель 1. Приближение величины упругого момента к максимально допустимой величине при водит к снижению до близких к нулю значений сигнала на выходе усилителя 14 и входе регулятора 8 напряжения, что обеспечивает отсутствие колебаний момента на валу электродвигателя в стопорных режимах и првмиёние надежности электромеханической системы. Учет скорости изменения разности моментов на валу электродвигателя, осуэдествляемай блоком 16 нелинейности , позволяет начать упреждакиее торможение электродвигателя, снижать заранее запас его кинетической энергии и всей совокупностью этих мер ограничить диншлйческие нагруэ ки на электромеханическую систему и повысить ее надежность. t - Для обеспечения высокой надежности электромеханической системы требуется надежная рекуперация в сеть части запасенной кинетической энергии ограничение двигательных режимов. Это достигается тем, что помощи cyNwaTopa 12, управляющего токоограниченнем, выявляется доминиЕ мщее в каждом отдельном режиме ограничение, т.е. то ограничение, которое обусловливает наименьшее значенне предельно допустимого тока якоря, что обеспечивается подключением череэ сумматор 12 необходимого напряжения подпора встречно к выводам постоянного ток блока 11 ограничения. Сигналами, действухяцими иа выходное напряжение ре гулятора б напряжения, являются снгна/в) пропорциональные току 4 возбуждения и модулю напряжения на якоре 2 электродвигателя, а также сигнал с выхода анализатора 19, определяемый близостью режима преобразователя 1 к предельно допустимому. Так, например, при выполнении преобразователя 1 в виде генератора 23 с вентильным возбудителем 24 в цепи обкютки 25 возбуждения генератс« а и асинхронным приводным двигателем сигнал на выходе анализатора 19 фор в виде напряжения пропорционального..т), U) где К - коэф циент пропорциональности f I- - максимальная опрокидываю ыая мсяцность на валу электродю1гателя J F . - потребляемая электродви гателем мотНость; V} - КПД электродвигателя при мощности близкой к PMQKU/ 1 - напряжение основной rapNroннческол составляющей. Приближение к недостимо 1 зким значениям вызывает через анализатор 19 ограничение на входе регулятора 9 тока , снижение PQKT и увеличение U-i , что в своп очередь. Обеспечивает увеличение устойчивости режима движения или торможения и, тем самим, увеличение надежности работы электромеханической системл в целом.. При применении в качестве электродвигателя 26 сэ н}фонного электродвигателя влияние U-, определяется зависимостью , а ограничение Р ограннчении тока якоря приводит к повьхиению возмощности уЕеличе1Я1я выработки реактивной мощности и увеличения U . При осуществлении sasufsit- ocTH (2 ) значение (Ракт)ля двигательного и тормозного pexaiMa электродвигателя 26 в общем случае раэлнчшл. Этим обеспечивается ув.елйчвние сянхронизируквдего электродвигатели и повмиение надежности работы привода и электромеханнческой cиcтe l в целсм. При иопользованш в качестве преобразователя 1 вейтнльвого преобразователя огранич1в11ие тока якоря 2 происходит при шсуперацин энергии в сеть в функции гшплитуды напряжеНИИ, подведенного к преобразователю 1, и потребляемой активной мощности, что овеспечивает эачиту от опрокидывания иимрторного режима преобразоаатёля 1 и noKBiteHite надежности эяекч Р механической системы в целом. Регулирование тока .возбуждения в функции тока якоря по цепи датчик 6 бпок 5 выделения модуля обеспечивает бблёе мягкие механические характерис тики привода, уменьшение электро-меосанической постоянной электродвигателя, что ведет к уменьшению динамических нагрузок. Таким образом, предложенный электропривод по сравнению с известными обеспечивает снижение динамических нагрузок в механической системе и исключение возможности опрокидывания режима преобразовательного агрегата при стопорении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Устройство для двухзонного регулирования скорости | 1980 |
|
SU928577A2 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Электропривод с упругой механической связью между электродвигателем и механизмом | 1984 |
|
SU1277330A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264287A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU771835A1 |
ЭЛЕКГРОТШВОД ПОСТОЯННОГО ТОКА, eoiteixiausHft электрода rate ль, упраяяяемые пйое азователи в цели якоря элвктродвнгаселя It в цепи его Q6Moir(tM возбуждения, вход последнег из через выделения мод ля х сик«мем с датчиком тока якоря, посл«и овжгвлы1О вкякмёН:Ные э адатч йк напряжения/на якоре,, регулятор напряжения и регулятор c ieek4 к вхо;{ам кото ptzK подключены соответственно датчики напряжения и якоря, а также включенный в ii&nit-oQgpaTilbli связи PCL гулятора блок ограничения тока якоря, к зп1 Ш1Ющему пжащу кр торого через cyMMstOi тэакп10((ег)ы датчик напряжения йа якоре и датчик тока возбуждения, операцндш{ый усилитель с блоком ограничения в цепи обратной связи и блок нелинейности, о т л и чаю щи и с я тем, что, с цель повышения Надежности в него ввеяеша датчик упругого момента, блок задания максимального момента и аиализат4:ф формы напряжения сетн, при дтом опё раиионный усилитель включен между за датчиком Напряжения HaOfiKopevB ре гулятором напряжения, а управл1вдв1Ий вход Плока ограничения в цепи его об ратной связи блок нелинейности соединен с задатчиком макси 4гш1 ного но мента и датчиком упруrotxa момента, причам Вход су «4атс1 а дополнитеяЫ1о соединен с анализатором формл напряжения сети.