1. 1 Изобретение относится к электротехнике и может найти применение преимущественно в станках с ЧПУ, имеющих большую длину перемещения и требующих высокой точности позиционирования. .Сложность создания приводов перемещения механизмов подач станков с ЧПУ, имеющих длину перемещения свыше 5м, заключается в том, что обеспечение высокой добротности следящего контура электропривода, определяющей точность позиционирования и быстродействие механизмов подач, требует с точки зрения исполнения этого меха низма создания беззазорной и достаточно жесткой кинематической цепи исполнительный двигатель - рабочий механизм - датчик положения, что тру но осуществимо при такой длине перемещения. Так, при использовании в приводе беззазорной шарико-винтовой пары при ходится устанавливать специальные дополнительные опоры винта для компенсации его прогиба, редуктор, так как .движение осуществляется вращением гайки, и прецизионно устанавливать датчик положения. При перемещениях CBbmie 10 м вынужденно переходят на зубчатые рейки с люфтовыбирающими пружинными торсионами или на прецизи онные рейки. Все это приводит к значительным технологическим и экс плуатационным трудностям по сравнению с приводами подач с меньшей длиной перемещения. Подобные приводы требуют наличия сложного редуктора, для кото рого необходимы постоянное обслужива ние и регулировка, прецизионной уста новки датчика положения. Вследствие устранения люфт.а предварительным механическим натягом возникает быстры износ реечного механизма. Известен электропривод перемеще ния саней в многоцелевом станке типа обрабатывающий центр модели ИР1600МФ4, состоящий из беззазорной шарико-винтовой пары, исполнительног высокомоментного электродвигателя, редуктора, тиристорного преобразователя, представляющего собой двухконтурную систему подчиненного регули-. рования скорости с ПИ-регуляторами тока и скорости, линейного датчика положения механизма (индуктосина)U Использование известного электропривода позволяет получить наобхо12димую точность позиционирования механизма подачи, но приводит к значительным технологическим и эксплуатационным труд1 остям, вызванным необходимостью установки дополнительной динамической опоры и специальных приспособлений для растяжки винта с целью устранения его прогиба; необходимостью установки дополнительного редуктора, связанной с тем, что движение осуществляется вращением гайки шарико-винтовой пары, так как вращение винта такой длины технически неосуществимо; прецизионной установкой линеек индуктосина на длине 6м и необходимостью постоянного контроля за прогибом винта в процессе эксплуатации станка. Наиболее близким к изобретению по технической сущности -и достигаемому результату является электропривод, содержайщй два электродвигателя, якорные обмотки которых подключены к вентильным преобразователям, в цепь, управления каждого из которых включен регулятор тока якоря с подключенными к их входам датчиками тока, установленные на валах электродвигателей тахогенераторы, регулятор частоты вращения с сумматором на входе и люфтовыбирающий блок С21. Недостатком известного устройства является то, что при моменте нагрузки, большем половины максимально возможного, тормозной двигатель переходит зазор и берет на себя часть нагрузки, что приводит к возникновению противофазных колебаний между двигателями. Введение дополнительных элементов, усложняя схему, не решает вопроса перехода тормозного (ведомого) двигателя через зазор и не дает возможности использования указанных устройств в механизмах подачи станков, требукяцих высокой точности позиционирования и качественных переходных процессов . Цель изобретения - улучшение качества выбора люфта и упрощение схемы управления электроприводом. Цель доостигается тем, что в электропривод перемещения механизма подачи станка, содержащий два электродвигателя, якорные обмотки которых подключены к вентильным преобразователям, в цепь управления каждого из которых включен регулятор тока якоря с подлюченными к их входам, датчиками тока, установленные на валах электродвигателей тахогенераторы, регулятор частоты вращения с сумматором на входе и люфтовыбирающий блок, введены второй регулятор частоты вращения с сумматором на входе, блок определения знака, два управляемых ключевых элемента и два неинвертирующих усилителя, а люфтовыбирающий блок вьтолнен в виде подключенных к входам регуляторов тока двух источников напряжения, выходные сигналы которых равны по величине и разнополярны, при этом тахогенераторы подключены к входам соответствующих регуляторов частоты вращения, каждый из которых своим выходом соединен через соответствующий управляемый ключевой элемен с задающим входом подчиненного ему . регулятора тока и через тот же ключевой элемент и неинвертирующий усилитель с входом другого регулятора тока, а цепи управления ключевых элементов через блок определения знака подключены к выходу сумматора одного из регуляторов частоты вращения.
На фиг. 1 изображена блок-схема двухдвигательного электропривода с люфтовыбирающим устройством; на фиг. 2 - реечный передаточный механизм; на фиг. 3 - характеристика моментов М f (М ц((р ) .
Электропривод (фиг.1) содержит электродвигатели 1 и 2, якорные обмотки которых подключены к вентильным преобразователям 3 и 4, в цепи управления которых включены соответственно регуляторы 5 и 6 тока якоря с подключенными к их входам через сумматоры 7 и 8 датчиками 9 и 10 тока, установленные на валах электродвигателей 1 и 2 тахогенераторы 11 и 12, регулятор 13 частоты вращения с сумматором 14 на входе, а также регулятор 15 частоты вращения с сумматором 16 на входе, блок 17 определения знака, управляемые ключевые элементы 18 и 19 и инвертирующие усилители 20 и 21. Люфтовыбирающий блок выполнен в виде подключенных к входам регуляторов 5 и 6 тока двух источников 22 и 23 напряжения, выходные сигналы которых равны по величине и разнополярны. Тахогенераторы 11,и 12 подключены к входам соответствующих регуляторов частоты вращения, казвдый из которых своим выхо1 . 4
11151 дом через соответствующий управляемьй ключевой элемент (регулятор 13 якрез ключевой элемент 18, а регулятор 14 через ключевой элемент 19) соединен с задающим входом подчиненного ему регулятора тока и через тот же ключевой элемент и инвертор с входом другого регулятора тока, а цепи управления ключевых элементов 18 и 19 через блок 17 определения знака подключены к выходу сумматора одного из регуляторов частоты вращения (в данном случае к сумматору 14).
Системы импульсно-фазового управления преобразователей содержат формирователи 24 и 25 импульсов, распределители 26 и 27 импульсов и импульсные трансформаторы 28 и 29, предназначенные для гальванической развязки силовых цепей и цепей управления. Питание преобразователей 3 и 4 осуществля,ется от трансформатора 30.
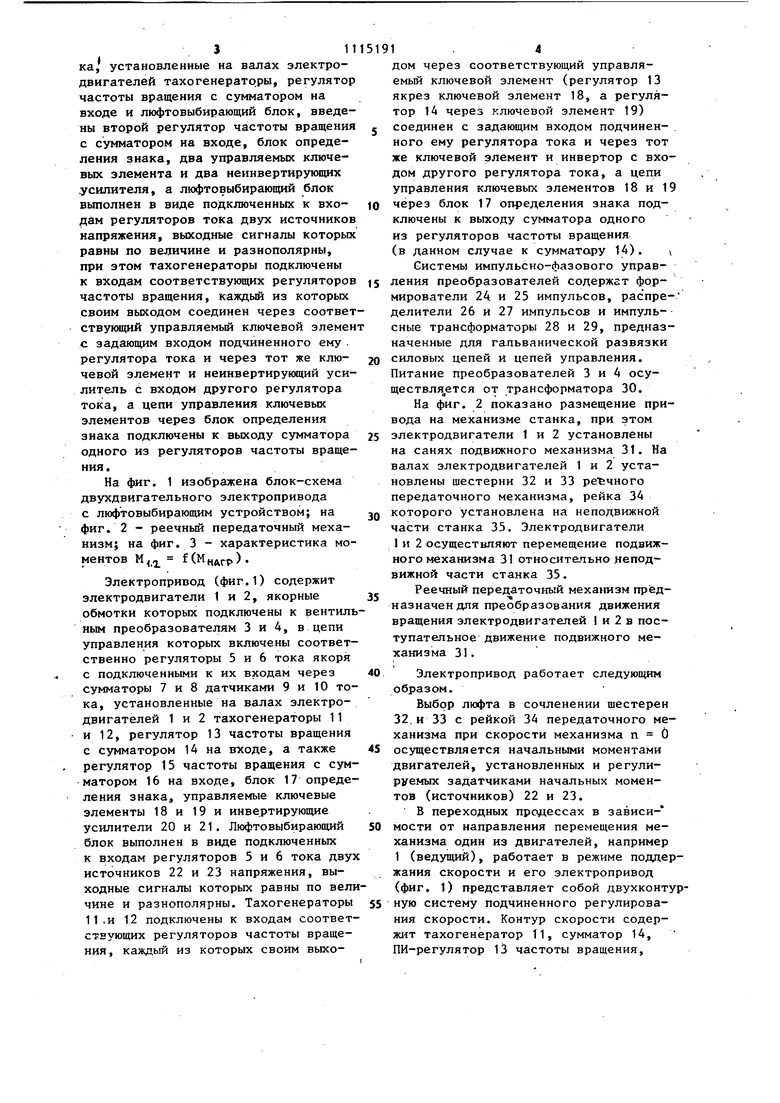
На фиг. 2 показано размещение привода на механизме станка, при этом электродвигатели 1 и 2 установлены на санях подвижного механизма 31. На валах электродвигателей 1 и 2 установлены шестерни 32 и 33 реечного передаточного механизма, рейка 34 которого установлена на неподвижной части станка 35. Электродвигатели 1 и 2 осуществляют перемещение подвижного механизма 31 относительно неподвижной части станка 35.
Реечный передаточный механизм предназначен для преобразования движения вращения электродвигателей 1 и 2 в поступательное движение подвижного механизма 31.
Электропривод работает следующим образом.
Выбор люфта в сочленении шестерен 32, и 33 с рейкой 34 передаточного механизма при скорости механизма п О осуществляется начальными моментами двигателей, установленных и регулируемых задатчиками начальных моментов (источников) 22 и 23.
В переходных продессах в зависимости от направления перемещения механизма один из двигателей, например 1 (ведущий), работает в режиме поддержания скорости и его электропривод (фиг. 1) представляет собой двухконтурную систему подчиненного регулирования скорости. Контур скорости содержит тахогенератор 11, сумматор 14, пи-регулятор 13 частоты вращения.
J 11
сигнал выхода которого подается на вход контура тока, содержащего сумматор 7, пи-регулятор 5 тока, формирователь 24 импульсов, распределитель 26 импульсов, импульсный трансформатор 28, вентильный преобразователь 3 и сопротивление шунта датчика тока 9 в якорной цепи электродвигателя 1. Другой двигатель 2 (ведомый) работает в режимепропорционального слежения за динамическим моментом (током) ведущего двигателя 1 и его привод представляет собой одноконтурную систему регулирования тока,.содержащую сумматор 8, пи-регулятор 6 тока, формирователь 25 импульсов, распределитель 27 импульсов, импульсный трансформатор 29, вентильный преобра зователь 4, сопротивление шунта датчика тока 10 в якорной цепи двигателя 2.
Необходимые изменения в структуре электроприводов обоих двигателей осу ществляет блок 17 определения знака с двумя логическими ключами 18 и 19, работающий в функции разности напряжений задания скорости механизма и тахогенератора 11 электродвигателя 1
Блок 17 определения знака с логическими ключами 18 и 19 отключает
5191
пи-регулятор 15 частоты вращения ведомого двигателя 2 и подключает к выходу пи-регулятора 13 частоты вращения ведущего двигателя 1 неинвер5 тирующий усилитель 20. Сигналом задания пи-регулятора 6 тока ведомого двигателя 2 является выходное напряжение работающего неинвертирующего усилителя 20. При обратном направле10 НИИ движения подвижного узла по направляющим станины ведущим двигателем становится двигатель 2, ведомым двигатель 1, и система работает аналогично.
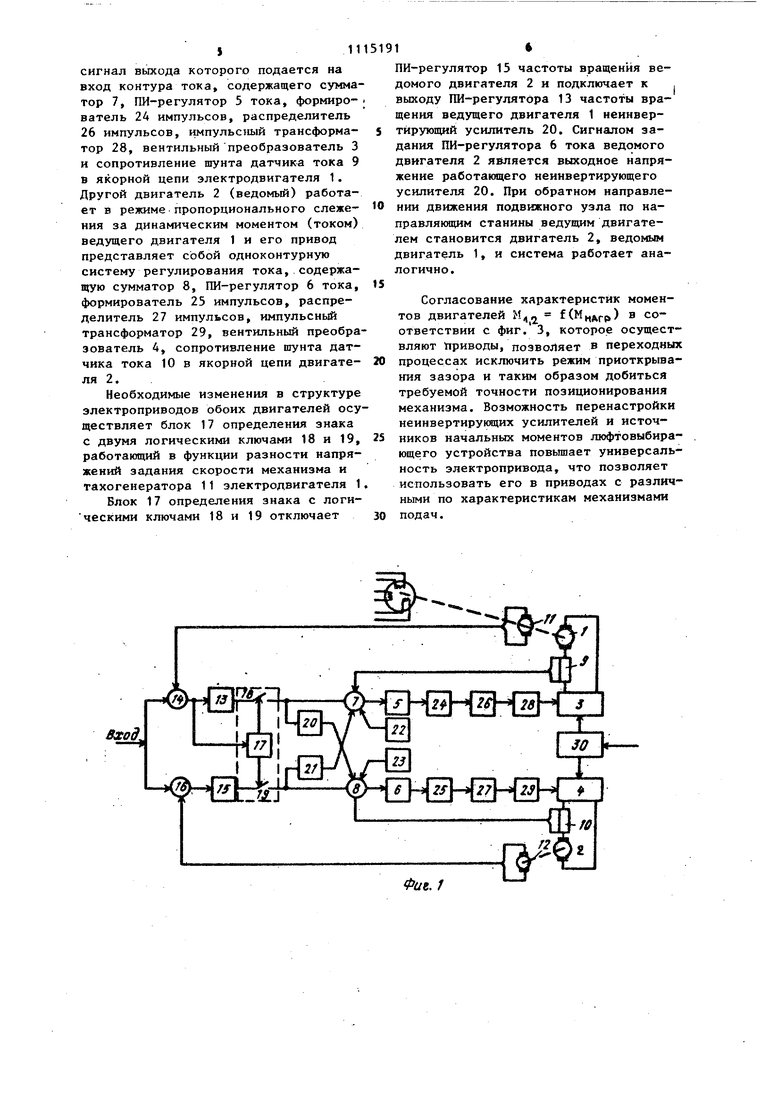
Согласование характеристик моментов двигателей М, ) в соответствии с фиг. 3, которое осуществляют йриводы, позволяет в переходных процессах исключить режим приоткрывания зазора и таким образом добиться требуемой точности позиционирования механизма. Возможность перенастройки неинвертирукицих усилителей и источников начальных моментов люфтовыбира ющего устройства повьппает универсальность электропривода, что позволяет использовать его в приводах с различными по характеристикам механизмами подач.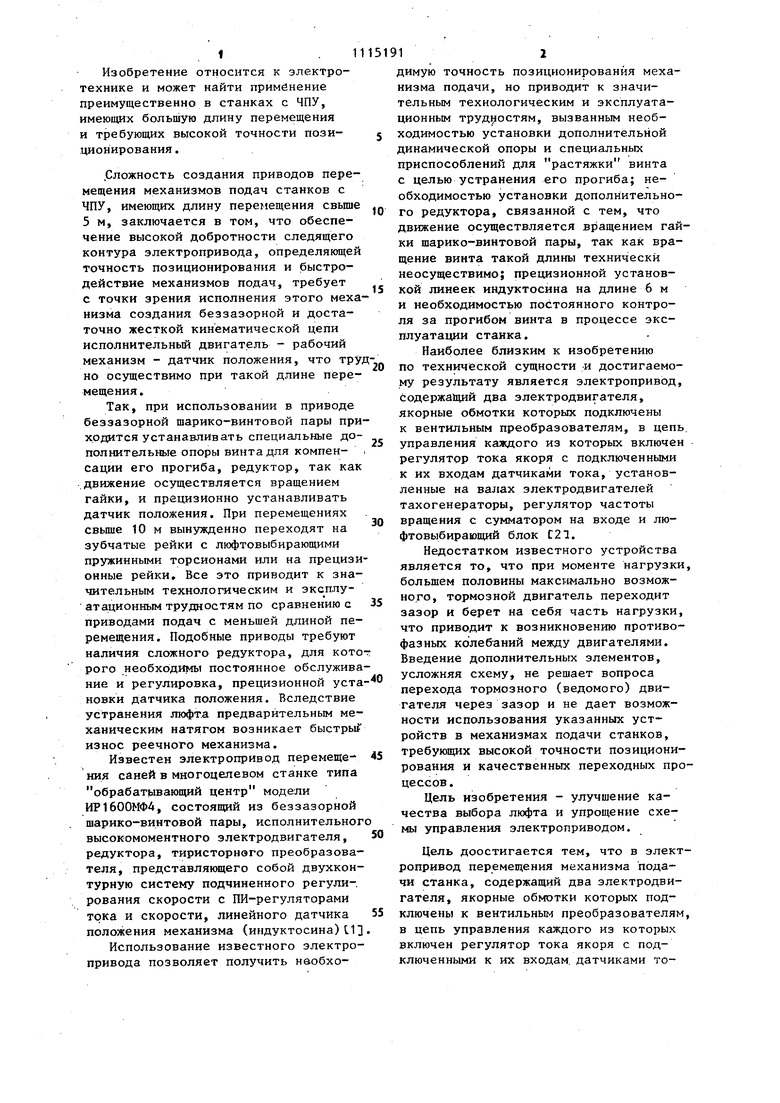
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Вентильный электропривод постоянного тока | 1984 |
|
SU1492438A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Реверсивный вентильный электропривод постоянного тока | 1970 |
|
SU650191A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011287C1 |
| Электропривод с подчиненным регулированием параметров | 1985 |
|
SU1297202A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод по системе генератор-двигатель с подчиненным регулированием | 1978 |
|
SU896732A1 |
ЭЛЕКТРОПРИВОД ПЕРЕМЕЩЕНИЯ МЕХАНИЗМА ПОДАЧИ СТАНКА, содержащий два электродвигателя, якорные обмотки которых подключены к вентильным преобразователям, в цепь управления каждого из которых включен регулятор тока якоря d подключенными к их входам датчиками тока, установленные на валах электродвигателей тахогенераторы, регулятор частоты вращения с сумматором на входе и люфтовыбирающий блок, отличающийся, тем, что, с целью улучшения качества выбора люфта и упрощения схемы управления, в него введены в-торой .регулятор частоты вращения с сумматором на входе, блок определения знака, два управляемых ключевых элемента и два неинвер- тирующих усилителя, а люфтовыбиракиций блок BMnojiHeH в виде подключенных к входам регуляторов тока двух источников напряжения, выходные сигналы которых равны по величине и разнополярны, при этом тахогенераторы подключены к входам соответствующих регуляторов частоты вращения, каждый из которых своим выходом соединен через соответствующий управляемый ключевой элемент с задающим входом подчиненного ему регулятора тока и через тот же ключевой элемент и неинвертирующий усилитель с входом другого регулятора тока, а цепи управления ключевых элементов через блок определения знака подключены к выходу сумматора одного из регуляторов чассл тоты вращения.
Вход, S2 Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ручной механизм для движения лодки | 1925 |
|
SU1600A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
