(54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ОДНОКОВШОВОГО ЭКСКАВАТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1989 |
|
SU1624097A2 |
| Устройство для управления процессом компания одноковшового экскаватора | 1976 |
|
SU617546A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТЙОПРНВЙДОМ " ' КОПАЮЩЕГО МЕХАНИЗМА -—_. | 1975 |
|
SU825808A1 |
| СПОСОБ УПРАВЛЕНИЯ КОПАЮЩИМ МЕХАНИЗМОМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2001 |
|
RU2211292C2 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1975 |
|
SU595463A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
1
Изобретение относится к одноковшовым экскаваторам типа прямая лопата и предназначается для автоматического управления операцией копания.
Известен способ управления процессом, копания одноковшового экскаватора, включающий измерение усилия привода подъема, определение рассогласования между этим усилием и заданным значением и уменьшение пропорционально этому рассогласованию величины тока якорной цепи привода подъема 1.
Это способствует уменьшению нагрузок, действующих на привод подъема при стопорении, однако отстутствие воздействия на привод напора при этом не позволяет регулировать толщину стружки и автоматизировать процесс копания.
Известен также способ управления процессом копания одноковшового экскаватора с регулируемыми приводами подъема и напора, включающий измерение суммы величин усилия механизма привода подъема и производной этого усилия, определение рассогласования между их значением этой
суммы и заданным значением усилия механизма привода подъема и уменьшение тока якорной цепи привода подъема в зависимости от величины этой разности 2.
Цель изобретения - повышение производительности экскаватора за счет регулирования толщины стружки, снимаемой ковшом.
Это достигается тем, что уменьшают величину стопорного тока якорной цепи привода напора пропорционально рассогласованию между значением суммы величин усилия механизма привода подъема и производной этого усилия, и заданным значением усилия механизма привода подъема.
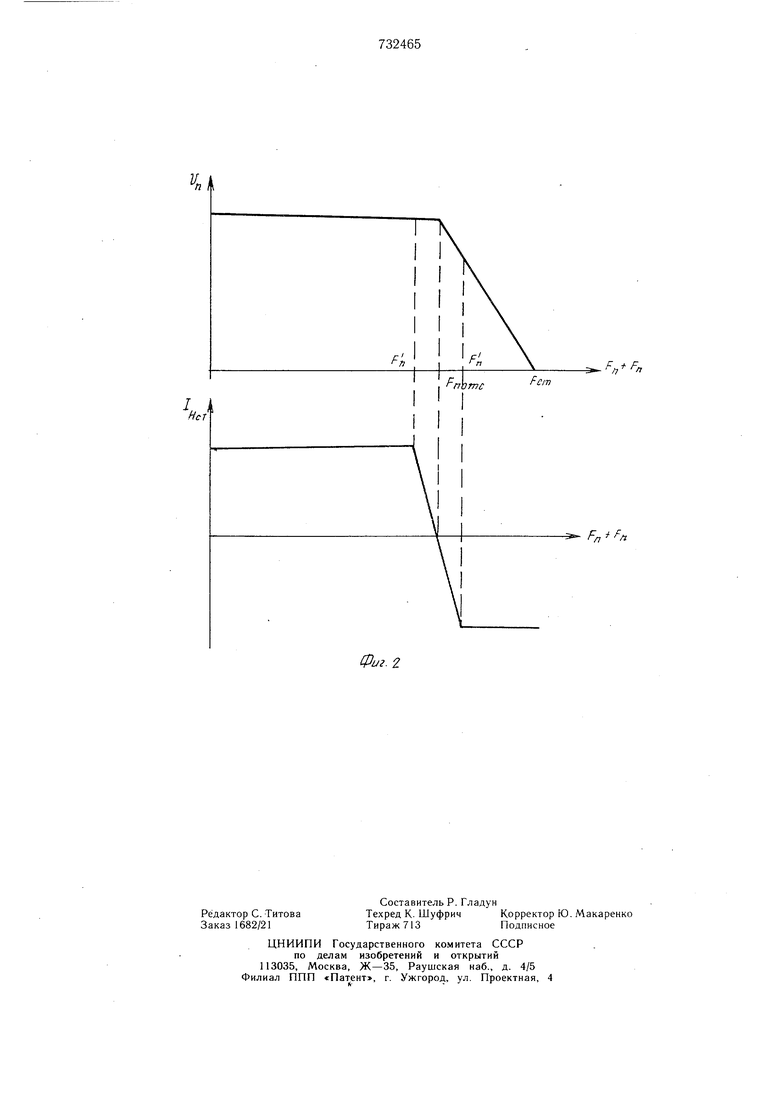
На фиг. 1 изображен вариант устрой j ства, иллюстрирующего предлагаемый способ; на фиг. 2 - статистическая характеристика этого устройства.
Устройство включает в себя систему 1 управления привода напора, состоящую из последовательно соединенных регулятора 2
20 скорости, первого ключевого элемента 3 и регулятора тока 4. Система управления подключена к преобразователю 5 с присоединенным к нему двигателем 6. Датчик 7 усилия привода подъема и датчик 8 производной этого усилия через нелинейный суммирующий усилитель 9 и второй ключевой элемент 10 соединены с регулятором тока 4. Управляющие входы первого и второго ключевых элементов подключены к узлу 11 включения системы автоматического копания.
Устройство работает следующим образом.
При включении системы автоматического копания на выходе узла 11 появляется сигнал, размыкающий первый ключевой элемент и замыкающий второй ключевой элемент. При этом выход регулятора скорости отключается от входа регулятора тока, который подсоединяется к выходу нелинейного суммирующего усилителя.
Нелинейный суммирующий усилитель имеет характеристику, обеспечивающую реализацию статической характеристики, приведенной на фиг. 2. При нагрузке на привод подъема меньщих значений на выходе усилителя 9 имеется сигнал, соответствующий максимальному значению стопорного тока привода напора. Привод напора при этом развивает максимальное усилие, заглубляя ковш с высокой интенсивностью и увеличивая толщину стружки.
При возрастании нагрузки на привод подъема больще значения величина стопорного тока привода напора уменьшается. При дальнейшем увеличении усилия привода подъема задание на стопорный ток привода напора изменяет знак,и ковш выглубляется из забоя, уменьшая толщину стружки. Таким образом, обеспечивается стабилизация нагрузки на привод подъема и, соответственно, оптимизация процесса копания.
Производная усилия привода подъема (в простейшем случае производная тока якорной цепи подъема при постоянном токе возбуждения двигателя), получаемая с помощью датчика 8 служит для повышения быстродействия системы и улучшения качества регулирования.
Использование способа управления процессом копания позволяет повысить производительность экскаватора на 7-8% .
Формула изобретения
Способ управления процессом копания одноковшового экскаватора с регулируемыми приводами подъема и напора, включающий измерение суммы величин усилия механизма привода подъема и производной этого усилия и определение рассогласования между значением этой суммы и заданным значением усилия механизма привода подъема, отличающийся тем, что, с целью повышения производительности экскаватора за счет регулирования толщины стружки, снимаемой ковшом, уменьшают величину стопорного тока якорной цепи привода напора пропорционально рассогласованию между значением суммы величин усилия механизма привода подъема и производной этого усилия и заданным значением усилия механизма привода подъема.
Источники информации, принятые во внимание при экспертизе
1Авторское свидетельство СССР № 442272, кл. Е 02 F 9/20, 24.10.72.
2Авторское свидетельство СССР по заявке № 2676411/03, кл. Е 02 Е 9/20, 12.10.78 (прототип).
.
