Изобретение относится к области регулируемых автоматизированных электроприводов, в которых осуществ ляется :цифроаналоговое; регулирование скорости или соотношения скоростей, либо синхронное движение двух механизмов по системе электрический вал с повы1иенной точност Измерителем в этих электроприводах является датчик импульсов,механи чески связанный с валом двигателя, причем датчик импульсов ведущего электропривода выдает импульсы задающей частоты для ведомого электропривода. Система управления ве домого элек ропривода, например, постоянного то с регулируемым тиристорным выпрямит лем содержит аналоговые регуляторы яКоря и скорости с аналоговыми датчиками. Внешним регулятором-Является цифровой интегральный регулятор скорости, выполненный обычно цифроаналоговым для повышения точное-ти 13,С2. Наиболее близким по технической сущности к изобретению является электропривод с uифpoaнaлoгoвoйt системой управления, содержащий дат чик задающей частоты, подключенный
(54) ПРИВОД через делитель частоты к первым входам регистра ключей, вторые входы которого соединены с выходом задающего блока, а выход - с первым входом блока несовпадения, второй вход которого соединен с датчиком импульсов, а выход - со входом реверсивного сумматора, выход которого через первый цифроаналоговый. преобразователь (ЦАП) подключен к первому входу блока формирования команд, выход которого соед: 1нен со входом электродвигателя, кинематически соединен™ ного с датчиком импульсов и датчиком скорости,.выход которого подключен ко второму входу блока формирования команд 3, Недостаточные быстродействие и точность работы этой системы управления обусловлены периодическими погрешностями, вносимыми на ЦАП вследствие неравномерности следования импульсов от обоих датчиков. Неравномерность импульсов задающей, частоты связана с принципом работы цифрового множителя на входе систеMJ, а неравномерность импульсов датчика электропривода - с несоосностью и эксцентриситетом в механической передаче.
Это ограничивает диапазоны скоости и коэффициентов соотношения коростей. Для повышения точности ребуется значительно увеличить коичество импульсов на один оборот атчика ирабочие ч астоты в системе о предельных для элементной базы. ля повышения точности, например, выше +0,2% устанавливают фильтры, изза которых ухудшается динамическая очность электропривода. При этом невозможно применить электроприводы в ряде случаев, когда динамические ежимы занимают значительную долю цикла (например, в прокатных станах в металлургической промышленности),
Цель изобретения - повышение быстоодействия и точности работы привода.
Эта цель достигается тем, что в предлагаемый электропривод с цифроаналоговой системой управления введен блок переключения весовых коэффициентов, блок ключей поразрядных ошибок, блок логического сложения, второй и третий ЦАП, аналоговый ключ, блок индикации и счетчик импульсов, вход которого соединен с выходом датчика импульсов, .а выход через второй ЦАП - с третьим входом .блока формирования команд, четвертйй вход которого соединен с выходом аналогового ключа. Первый вход последнего через блок индикации соединен с выходом задающего блока, а второй вход через второй ЦАП - с выходами блока логического сложения, входьг которого подключены к выходам блока ключей поразрядных ошибок. Первый вход блока ключей соединен с выходом блока переключения весовых коэффициентов, первые входы которого соединены с выходом делителя частоты, а вторые входы - с; выходом задающего блока и вторыми входами блока ключей поразрядных ошибок .
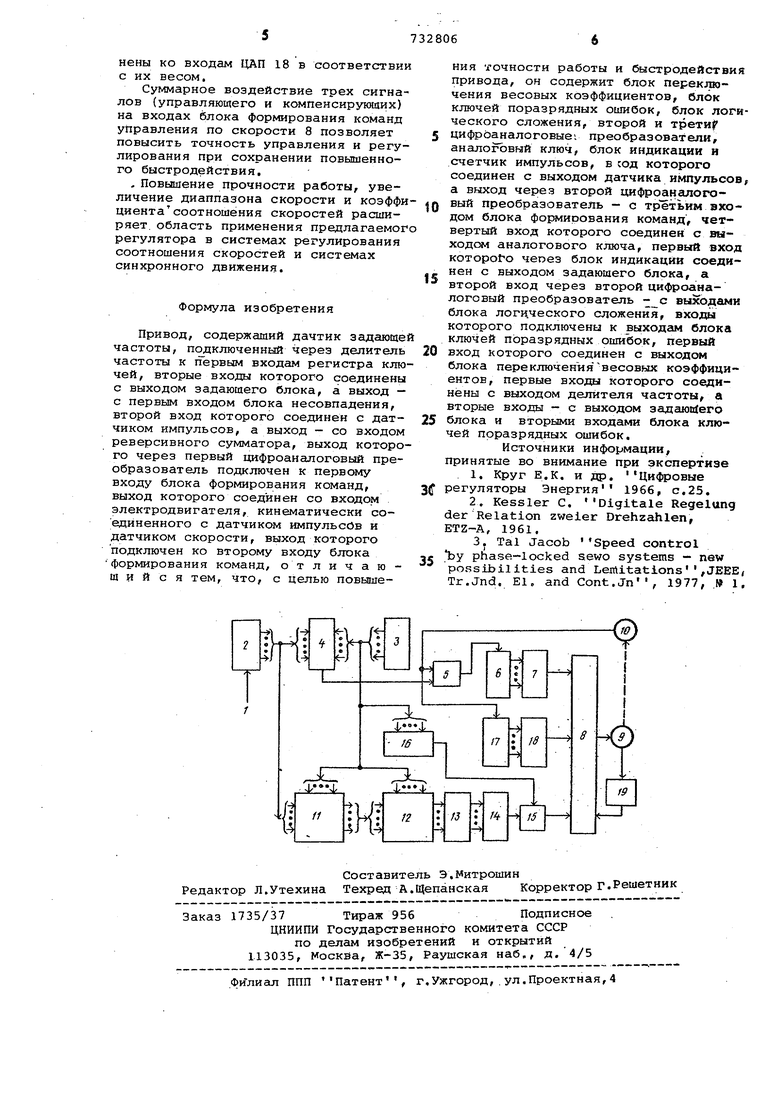
На чертеже поиведена структурная схема электропривода с цифроаналоговой системой управления.
Он содержит датчик 1 задающей частоты, делитель частоты 2,задающий блок 3, регистр 4 ключей, блок несовпадения 5, реверсивный сумматор б, первйй ЦАП 7, блок формирования команд управления по скорости 8, электродвигатель 9, датчик импульсов 10, блок переключения весовых коэффициентов 11,.блок 12 ключей поразрядных ошибок 6jtoK логического сложения ве.совых коэффициентов 13, второй ЦАП оишбок 14, аналоговый ключ 15, блок индикации кратного коэффициента 16, счетчик импульсов 17, третий ЦАП неравномерности хода 18 и датчик скорости 19.
Сигнал от датчика делится многоразрядным делителем частоты 2. Выход каждого разряда делителя частоты 2 включен в регистре ключей по схеме
совпадения с соответствующими вы кэдами многоразрядного задающего блока 3, с помощью которого задается коэффициент соотношения скоростей или умножения задающей частоты, ког торый должен быть меньше единицы. При совпадении единичных сигналов в любом из разрядов в регистре ключей формируется импульс и по схеме ИЛИ выдается на вход блока несовпадения
n 5, где последовательность импульсов сравнивается с последовательностью импульсов от датчика 10 и выдается сигнал на вход сумматора 6.
При совпадении импульсов во времени блок 5 несовпадения не пропускает их на вход сумматора б, который интегрирует разность частот.
При равных частотах и совпадении фазы импульсов на входах блока несовпадения 5 код на выходе интегратора не изменяется, а аналоговый сигнал с выхода ЦАП 7 выдается в качестве задающего на вход блока 8 и сравнивается с аналоговым сигналом на выходе датчика 19.
5 Импульсы с выходов регистра ключей и датчика 10, как правило, не совпадают по фазе.
Для компенсации интегральной ошибки все выходы разрядов делителя
fj частоты 2. соединены с первыми входами блока переключения весовых коэффициентов 11, на вторые входы которого подключены все разряды задающего блока 3. В блоке 11с помощью.
S Регистра сдвига и ключевых элементов (диодных матриц) осуществляется пере ключ.ение выходов.
Этот блок выполняет функции переключателя весовых коэффициентов, когда коэффициент в задающем блоке
0 3 меньше 0,5, 0,24, 0,125 и т.д. Выходы блока .11 подключены ко входам блока ключей поразрядных ошибок 12 содержащего ключи, управляемые поразрядно по входам от задающего блока 3.
Выходы блока 12 подключены ко входам блока 13, который выполняет функции сложения сигналов с одинаковыми 0 весовыми значениями. На. выходе этого блока образуется код, распределенный по весовым значениям так, что после преобрааования с помощью ЦАП 14 образуется аналоговьгй сигнал, точно
повторяющий характеристику ошибки
умножения.
Для компенсации второй неравномерности, вызываемой в частности погрешностями датчика 19, введены кольцевой счетчик 17 и третий ЦАП 18.
Выход датчика 10 подключен ко входу счетчика 17, заполняемого количест -. вом импульсов, соответствующим периоду неравномерности. Заполнение повторяется каждый период. Выходы
всех разрядов счетчика 17 подсоедийены ко входам ЦАП 18 в соответствии с их весом.
Суммарное воздействие трех сигналов (управляющего и компенсирующих) на входах блока формирования команд управления по скорости 8 позволяет повысить точность управления и регулирования при сохранении повышенного быстродействия,
. Повышение прочности работы, увеличение диаппазона скорости и коэффициента соотношения скоростей расширяет, область применения предлагаемог регулятора в системах регулирования соотношения скоростей и системах синхронного движения.
Формула изобретения
Привод, содержащий дачтик задающе частоты, подключенный через делитель частоты к первым входам регистра ключей, вторые входы которого соединены с выходом задающего блока, а выход - с первым входом блока несовпадения, второй вход которого соединен с датчиком импульсов, а выход - со входом реверсивного сумматора, выход которого через первый цифроаналоговый преобразователь подключен к первому входу блока формирования команд, выход которого соединен со вхсщом электродвигателя, кинематически соединенного с датчиком импульсов и датчиком скорости, выход которого подключен ко второму входу блока формирования команд, отличающий с я тем, что, с целью повышения точности работы и быстродействия привода, он содержит блок переключения весовых коэффициентов, блок ключей поразрядных ошибок, блок логического сложения, второй и трети цифроаналоговые. преобразоваггели, аналоговый ключ, блок индикации и счетчик импульсов, в юд которого соединен с выходом датчика импульсов, а выход через второй цифроаналоговый преобразователь - с третьим вхо0дом блока формирования команд, четвертый вход которого соединен с выходом аналогового ключа, первый вход KOTOpoto чепез блок индикации соединен с выходом задающего блока, а
5 второй вход через второй цифроаналоговый преобразователь выходами блока логического сложения, входы которого подключены к выходам блока ключей поразрядных ошибок, первый
0 вход которого соединен с выходом блока переключения весовых коэффициентов, первые входы которого соединены с выходом делителя частоты, а вторые входы - с выходом задающего
5 блока и вторыми входами блока ключей поразрядных ошибок.
Источники информации, принятые во внимание при экспертизе
1.Круг Е.К. и др. Цифровые регуляторы Энергия 1966, с.25.
(Г
2.Kessler С. Digitale Regelung der Relation zweier Drehzahlen, ETZ-A, 1961.
3. Tal Jacob Speed control by phase-locked sewo systems - new
5 possibilities and Lerrtitations,JEEE,
Tr.Jnde El. and Cont.Jn
1977, 1,
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Многоканальная электроразведочная станция | 1980 |
|
SU934414A1 |
| Цифровой синтезатор частот | 1990 |
|
SU1748251A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2433528C2 |
| ЦИФРОВОЙ МАГНИТОФОН | 1992 |
|
RU2054715C1 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДНА ВОДОЕМОВ | 2002 |
|
RU2212692C1 |
| Устройство для регулирования температуры | 1981 |
|
SU980076A1 |
