Изобретение относится к области гироскопического приборостроения, в частности к гироинтеграторам линейных ускорений (ГИ), и может быть использовано для измерения линейной скорости и ускорения движущегося объекта в инерциальных навигационных системах (ИНС) как в установившемся режиме ГИ, так и в процессе разгона гиромотора (ГМ).
Известны ГИ, измеряющие линейные скорости и ускорения, действующие по оси чувствительности ГИ, которые включают трехстепенной неуравновешенный гироскоп и систему межрамочной коррекции (СМРК) [1] Недостатком известных ГИ является относительно невысокая точность измерения из-за наличия методических, инструментальных, статических и динамических ошибок прибора.
Известны ГИ [2] содержащие трехстепенной неуравновешенный гироскоп, включающий наружную рамку и чувствительный элемент (ЧЭ), в котором применены два ГМ с одинаковыми конструктивными параметрами, соединенные спарником, причем векторы кинетических моментов гироскопов направлены в противоположные стороны, систему СМРК, состоящую из последовательно соединенных датчика угла, установленного на оси подвеса, усилителя и датчика момента, закрепленного на оси чувствительности, и датчик угла, расположенный на оси чувствительности ГИ. Недостатком известных ГИ является наличие погрешности, обусловленной неравенством величин кинетических моментов гироскопов и их изменением в процессе работы прибора.
Из известных ГИ наиболее близким по технической сущности и достигаемому результату является ГИ [3] содержащий трехстепенной неуравновешенный гироскоп, включающий наружную рамку и ЧЭ, который состоит из корпуса с закрепленным на нем статором и ротора, вращающегося в подшипниках главной оси, систему СМРК, состоящую из последовательно соединенных датчика угла, установленного на оси подвеса, усилителя и датчика момента, расположенного на оси чувствительности, и датчик угла, установленный на оси чувствительности прибора.
При действии вдоль оси чувствительности линейного ускорения по оси подвеса возникает момент, пропорциональный действующему ускорению, наружная рамка ГИ прецессирует с угловой скоростью 
где 
μo, H0 номинальные значения маятниковости и кинетического момента ГИ;
Ho = I•ωo,
J момент инерции ротора ГМ относительно главной оси ГИ;
ωo номинальное значение угловой скорости вращения ротора ГМ;
n линейная перегрузка, отношение кажущегося линейного ускорения, действующего вдоль оси чувствительности ГИ, к величине ускорения силы тяжести.
На выходе датчика угла, установленного на оси чувствительности, появляется сигнал
uv = kДУ•kμ•v,
где kду коэффициент передачи датчика угла, установленного на оси чувствительности;
V величина линейной скорости объекта вдоль оси чувствительности ГИ.
Техническим недостатком известного ГИ является большое время подготовки прибора к использованию (измерению), т.е. к состоянию, когда ГИ вырабатывает информацию с заданной точностью.
Подготовка ГИ заканчивается после включения СМРК, которое производится по окончании разгона ГМ (т. е. когда угловая скорость вращения ротора ГМ становится равной номинальному значению). Следовательно, время подготовки ГИ определяется, в основном, продолжительностью разгона ГМ.
При включении СМРК во время разгона ГМ, вследствие изменения величины кинетического момента гироскопа в широких пределах 0 ≅ H ≅ H0 в известном ГИ статическая и динамическая погрешности прибора достигают значительной величины, а в начале разгона ГМ при малых H≲(0,1-0,2)H0 происходит нарушение работоспособности ГИ из-за ударов чувствительного элемента (ЧЭ) об упоры. Это объясняется тем, что параметры СМРК выбираются, исходя из обеспечения устойчивой работы ГИ при номинальном значении H0 кинетического момента гироскопа в установившемся режиме ГИ (по окончании разгона ГМ) и не удовлетворяют требованиям переходного режима (режима разгона гиромотора).
Кроме того, в известном ГИ во время разгона имеет место большая погрешность измерения линейной скорости и ускорения, изменяющаяся во времени по закону изменения кинетического момента гироскопа
где  абсолютная и относительная погрешности масштабного коэффициента ГИ во время разгона ГМ (0<t<tр, где tр продолжительность разгона ГМ);
абсолютная и относительная погрешности масштабного коэффициента ГИ во время разгона ГМ (0<t<tр, где tр продолжительность разгона ГМ); номинальное значение угловой скорости прецессии ГИ (при H0);
номинальное значение угловой скорости прецессии ГИ (при H0);
H(t) значение кинетического момента гироскопа в момент времени от начала разгона ГМ; H(t) Iω(t).
Задачей, решаемой предлагаемым устройством, является обеспечение возможности измерения с минимальными статической и динамической погрешностями в процессе разгона ГМ, что позволяет сократить время готовности ГИ к использованию.
Это достигается тем, что в процессе разгона гиромотора при H ≈ 0,2H0 включается СМРК (подается напряжение питания в систему СМРК), в которой для обеспечения устойчивости и минимальных величин динамической и статической ошибок ГИ изменяют величину коэффициента передачи СМРК в зависимости от величины кинетического момента гироскопа, а также создается корректирующий периодический импульсный момент по оси подвеса, величина которого формируется в зависимости от величины кинетического момента гироскопа, причем длительность Δτ действия момента равна времени, в течение которого абсолютное значение угла b поворота ЧЭ относительно оси подвеса больше величины, равной заданному ограничению  по углу β, а скважность DS импульсов момента равна времени, в течение которого абсолютное значение угла β меньше величины
по углу β, а скважность DS импульсов момента равна времени, в течение которого абсолютное значение угла β меньше величины  , при этом величина линейной скорости определяется в вычислителе по формуле
, при этом величина линейной скорости определяется в вычислителе по формуле
где Ut величина выходного сигнала датчика угла, расположенного на оси чувствительности ГИ, в момент времени t разгона ГМ.
Сокращение времени готовности ГИ к измерению достигается благодаря тому, что в предлагаемом ГИ, содержащем трехстепенной неуравновешенный гироскоп, систему СМРК, состоящую из последовательно соединенных датчика угла, закрепленного на оси подвеса, усилителя и датчика момента, установленного на оси чувствительности, и датчик угла, расположенный на оси чувствительности прибора, введены последовательно соединенные датчик скорости, установленный на главной оси гироскопа, блок сравнения, вычислитель, состоящий из преобразователя напряжение -код, микропроцессора, блока памяти и таймера, согласующее устройство и датчик момента, закрепленный на оси подвеса, последовательно соединенные цифро-аналоговый преобразователь, вход которого соединен с вторым выходом вычислителя, и электронный ключ, выход которого подключен к второму входу датчика момента, закрепленного на оси подвеса, дифференцирующий блок, вход которого соединен с выходом датчика угла, расположенного на оси чувствительности, а выход соединен с вторым входом вычислителя, и реле, вход которого подключен к второму выходу цифро-аналогового преобразователя, при этом выход датчика угла, расположенного на оси чувствительности, соединен с третьим входом вычислителя, выход датчика скорости, установленного на главной оси гироскопа, подключен к четвертому входу вычислителя, второй выход датчика угла, закрепленного на оси подвеса, соединен с вторым входом электронного ключа, второй вход блока сравнения подключен через последовательно соединенные формирователь пилообразного напряжения и блок задержки с шиной питания, причем через контакты реле соединены выход датчика угла, закрепленного на оси подвеса, с первым входом усилителя, третий выход цифро-аналогового преобразователя с вторым входом усилителя и выход электронного ключа с вторым входом датчика момента, закрепленного на оси подвеса.
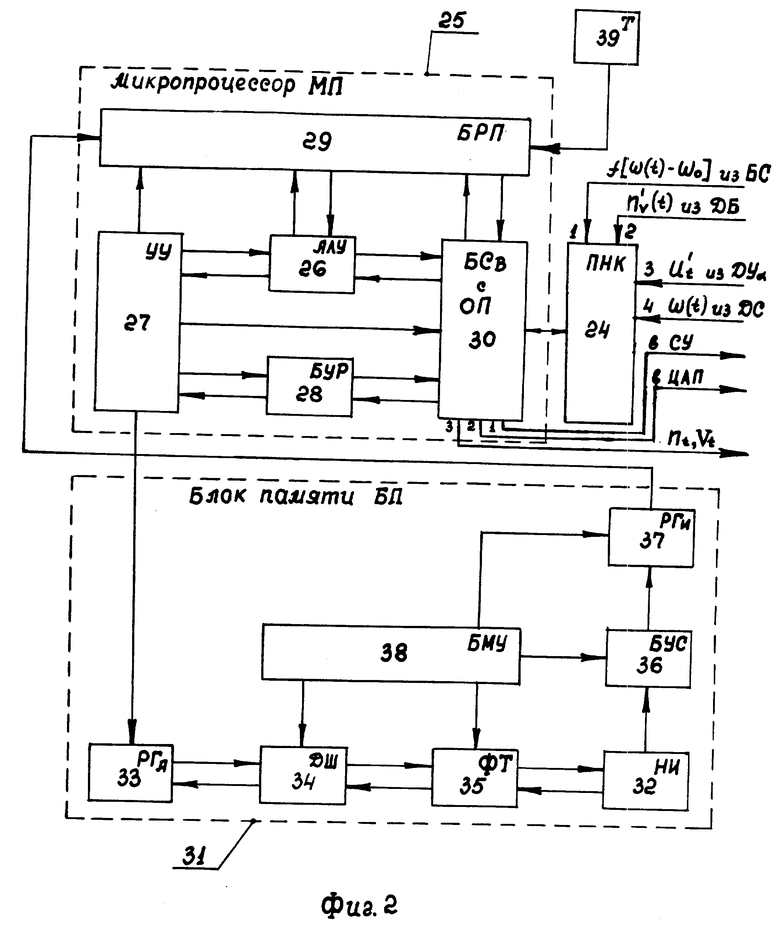
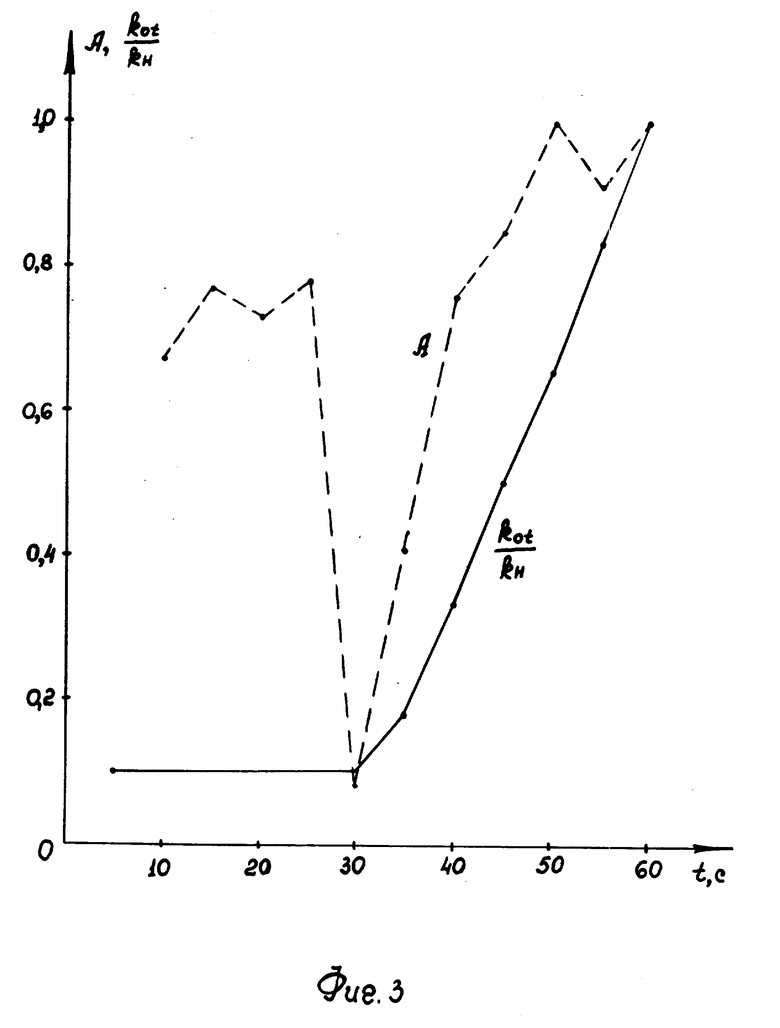
На фиг. 1 показана принципиальная схема предлагаемого ГИ; на фиг.2 - структурная схема вычислителя; на фиг.3 -график зависимости отношений динамических ошибок выходного сигнала ГИ от времени
где ΔД(t) динамическая ошибка при неизменяющемся в процессе разгона ГМ коэффициента передачи СМРК kн, определенном, исходя из устойчивости системы СМРК в установившемся режиме ГИ (при номинальном значении H0 кинетического момента гироскопа);
ΔОД(t) динамическая ошибка при оптимальных значениях коэффициента передачи СМРК kot (при которых динамическая ошибка ГИ минимальная), изменяемых во время разгона ГМ;
а также показан график  , отображающий закон, по которому изменяется коэффициент передачи СМРК в процессе разгона ГМ.
, отображающий закон, по которому изменяется коэффициент передачи СМРК в процессе разгона ГМ.
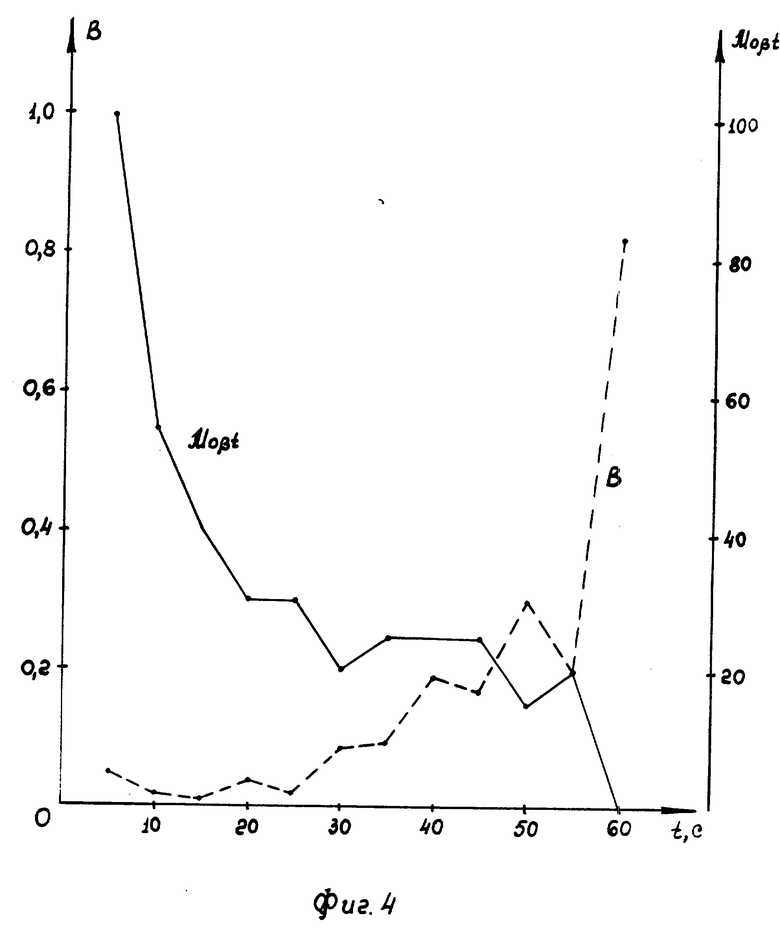
На фиг.4 приведен график зависимости отношений статических ошибок выходного сигнала ГИ от времени
где Δoc(t) статическая ошибка при оптимальных значениях величины периодического импульсного момента μoβt, создаваемого по оси подвеса ГИ (при которых статическая ошибка ГИ минимальная), изменяемых в процессе разгона ГМ;
Δc(t) статическая ошибка в процессе разгона ГМ при μβ = 0, а также график, отображающий закон moβt f(t), по которому изменяется величина периодического импульсного момента μoβt в процессе разгона ГМ.
ГИ содержит трехстепенной неуравновешенный гироскоп (Г) 1, включающий наружную рамку 2 и ЧЭ, который состоит из корпуса 3 с закрепленным на нем статором 4 и ротора 5 ГМ, систему СМРК, состоящую из последовательно соединенных датчика 6 угла (ДУβ), установленного на оси 7 подвеса, усилителя (У) 8 и датчика 9 момента  , расположенного на оси 10 чувствительности, причем датчик ДУβ6 подключается к усилителю У8 через контакты К1 реле (Р) 11, последовательно соединенные импульсный датчик 12 скорости (ДС), установленный на главной оси 13 гироскопа, блок 14 сравнения (БС), вычислитель (В) 15, согласующее устройство (СУ) 16 и датчик 17 момента ДМβ, размещенный на оси 7 подвеса, последовательно соединенные датчик 18 угла (ДУα), установленный на оси 10 чувствительности, и дифференцирующий блок (ДБ) 19, выход которого соединен с вторым входом вычислителя В15, причем выход датчика ДУα18 подключен также к третьему входу вычислителя В, последовательно соединенные цифро-аналоговый преобразователь (ЦАП) 10, вход которого подключен к второму выходу вычислителя В, и электронный ключ (ЭК) 21, выход которого через контакты К3 реле Р соединен с вторым входом датчика ДМβ, реле Р, вход которого подключен к второму выходу преобразователя ЦАП, при этом третий выход преобразователя ЦАП через контакты К2 реле Р соединен с вторым входом усилителя У, выход датчика ДС подключен к четвертому входу вычислителя В, второй выход датчика ДУβ подключен также к второму входу ключа ЭК, второй вход блока БС подключен через последовательно соединенные формирователь пилообразного напряжения (ФПН) 22 и блок задержки (БЗ) 23 с шиной питания. Вычислитель 15 (фиг.2) содержит:
, расположенного на оси 10 чувствительности, причем датчик ДУβ6 подключается к усилителю У8 через контакты К1 реле (Р) 11, последовательно соединенные импульсный датчик 12 скорости (ДС), установленный на главной оси 13 гироскопа, блок 14 сравнения (БС), вычислитель (В) 15, согласующее устройство (СУ) 16 и датчик 17 момента ДМβ, размещенный на оси 7 подвеса, последовательно соединенные датчик 18 угла (ДУα), установленный на оси 10 чувствительности, и дифференцирующий блок (ДБ) 19, выход которого соединен с вторым входом вычислителя В15, причем выход датчика ДУα18 подключен также к третьему входу вычислителя В, последовательно соединенные цифро-аналоговый преобразователь (ЦАП) 10, вход которого подключен к второму выходу вычислителя В, и электронный ключ (ЭК) 21, выход которого через контакты К3 реле Р соединен с вторым входом датчика ДМβ, реле Р, вход которого подключен к второму выходу преобразователя ЦАП, при этом третий выход преобразователя ЦАП через контакты К2 реле Р соединен с вторым входом усилителя У, выход датчика ДС подключен к четвертому входу вычислителя В, второй выход датчика ДУβ подключен также к второму входу ключа ЭК, второй вход блока БС подключен через последовательно соединенные формирователь пилообразного напряжения (ФПН) 22 и блок задержки (БЗ) 23 с шиной питания. Вычислитель 15 (фиг.2) содержит:
преобразователь ПНК 24 может быть, например, выполнен по принципу преобразователя цифровых вольтметров [3] и включает: электронные усилитель, интегратор и ключи, генератор тактовых импульсов, селекторы и триггеры;
микропроцессор МП 25 программно-управляемое устройство обработки цифровой информации и управления, выполненное на базе интегральных схем, структурно состоящее из арифметическо-логического устройства (АЛУ) 26, управляющего устройства (УУ) 27, блока управляющих регистров (БУР) 28, блока регистровой памяти (БРП) 29 и блока связи (БСв) 30, имеющего оперативную память ОП (Коган Б.М. Электронные вычислительные машины и системы. М. Энергоатомиздат, 1985, с. 219-222);
блок БП 31 состоит из элементов памяти и логической схемы управления записью и считывания информации (Преснухин Л.Н. Нестеров П.В. Цифровые вычислительные машины. М. Высшая школа, 1981, с. 248-250) и включает накопитель информации (НИ) 32, регистр адреса (РГА) 33, где записывается код адреса числа, дешифратор адреса (ДШ) 34, формирователь адресного тока (ФТ) 35, блок усилителей считывания (БУС) 36, предназначенный для усиления выходных сигналов накопителя НИ 32, выходной информационный регистр (РГи) 37 и блок местного управления (БМУ) 38, который осуществляет управление блоком БП;
таймер Т 39 подключается к блоку БРП 29 микропроцессора МП 25 и представляет собой кварцевый резонатор (Политехнический словарь./Под ред. А.Ю. Ишлинского. М. Советская энциклопедия, 1989) электромеханическую колебательную систему, содержащую кварцевую пластину, с делителем частоты и счетчиком импульсов.
Блок ДБ 19 может быть построен, например, на операционном усилителе с емкостью на входе и сопротивлением в цепи обратной связи (Бесекерский В.А. Попов Е. П. Теория систем автоматического регулирования. М. Наука, 1975, с. 87).
Преобразователь ЦАП 20 (многоканальный) кода в напряжение может быть построен по схеме суммирования токов, пропорциональных весам разрядов двоичного кода (Стрыгин В.В. Щарев Л.С. Основы вычислительной, микропроцессорной техники и программирования. М. Высшая школа, 1989), представляющей собой последовательно-параллельное соединение эталонных сопротивлений с электронными ключами в параллельных цепях, управляемыми от триггеров регистра.
Ключ ЭК 21 строится по схеме замыкающего ключа (Тетельбаум И.М. Шнейдер Ю. Р. 400 схем для АВМ. М. Энергия, 1978), на входы которого подаются сигнал с выхода преобразователя ЦАП 20 и сигнал с выхода датчика ДУβ6, а также выставляется ограничение  по углу β.
по углу β.
При подаче напряжения питания на ГИ контакты К2 и К3 реле Р11 замкнуты, а контакт К1 реле Р11 разомкнут, СМРК выключена, ротор 5 ГМ начинает вращаться, при этом наружная рамка 2 с ЧЭ ГИ не вращается относительно оси 10 чувствительности и на выходе датчика ДУα18 сигнал равен 0.
В блоке БП31 записываются программа выработки управляющих сигналов Sk и Sm, постоянные величины kДУ, kДБ, kЦАП, kЭК, kДМβ,, kДУβ,, kДМα, J, mo, H0, Sу, kμ, ωo, а также значения kot и μoβt в зависимости от величины H(t) т.е. в блоке БП помещаются массивы, в которых каждому значению H в диапазоне (≈0,2-1,0)H0 (каждому значению текущего времени в процессе разгона ГМ) соответствуют оптимальные значения kot и μoβt величин коэффициента передачи СМРК и периодического импульсного момента, создаваемого по оси подвеса.
В процессе разгона 5 ГМ с выхода датчика ДС12 четвертый вход вычислителя 15 поступает сигнал, пропорциональный фактическому значению угловой скорости ω(t) вращения ротора 5 ГМ в момент t.
При достижении угловой скоростью вращения ротора 5 ГМ величины, равной ~0,2ωo в преобразователь ЦАП 20 поступает сигнал из вычислителя 15, преобразователь 20 выдает в реле Р 11 команду, по которой замыкаются контакты К1. В результате происходит включение СМРК. Наружная рамка 2 с ЧЭ начинает прецессировать вокруг оси 10 чувствительности с угловой скоростью  (nt линейная перегрузка в момент времени t, отношение кажущегося линейного ускорения, действующего вдоль оси чувствительности ГИ, к величине ускорения силы тяжести) и на выходе датчика ДУα18 появляется сигнал, пропорциональный линейной скорости движущегося объекта, который через блок ДБ19 подается на второй вход вычислителя В15:
(nt линейная перегрузка в момент времени t, отношение кажущегося линейного ускорения, действующего вдоль оси чувствительности ГИ, к величине ускорения силы тяжести) и на выходе датчика ДУα18 появляется сигнал, пропорциональный линейной скорости движущегося объекта, который через блок ДБ19 подается на второй вход вычислителя В15: ,
,
где kДУα, kДБ коэффициенты передачи датчика ДУα18 и блока ДБ19.
Устройство УУ27 микропроцессора 25 в соответствии с программой выработки управляющих сигналов извлекает из блока БП31 постоянные величины J, mo, SУ, kДУα, kДБ, kЦАП, kДМβ, а из блока БРП 29 величину w, поступающую из датчика ДС 12, текущее значение t времени, вырабатываемое таймером Т39, и осуществляют передачу указанных величин в устройство АЛУ26, где определяется величина кинетического момента H(t) Iω(t) соответствующая данному моменту времени.
Затем устройство УУ27 по величине H(t) определяет ячейки памяти, в которых записаны оптимальные значения kot и μoβt величин коэффициента передачи СМРК и периодического импульсного момента, соответствующие рассчитанной величине H(t), и считывает величины kot и μoβt в устройство АЛУ 26, в котором вычисляются управляющие сигналы
где SУ коэффициент управления;
kЦАП, kЭК, kДМβ коэффициенты передачи преобразователя ЦАП 20, ключа ЭК21 и датчика ДМβ6.
Кодовые управляющие сигналы Sk и SM поступают на вход преобразователя ЦАП 20, где преобразовываются в аналоговые сигналы, и затем подаются соответственно на второй вход усилителя У 8 и первый вход ключа ЭК 21.
На втором входе усилителя У8 устанавливается управляемое сопротивление, являющееся входным сопротивлением одного из каскадов усилителя У8, величина которого изменяется в зависимости от величины управляющего сигнала Sk. В результате происходит изменение коэффициента kУt передачи усилителя У8 на такую величину, при которой коэффициент передачи СМРК становится равным kot = kДУβ•kуt•KДМα.. Таким образом производится изменение коэффициента передачи СМРК по закону kot f(t), показанному на фиг.3, и обеспечивается устойчивость СМРК и минимальная динамическая ошибка ГИ в процессе разгона ГМ.
Одновременно с управляющим сигналом SM, поступающим на первый вход ключа ЭК 21, на второй вход ЭК 21 подается выходной сигнал uДУβ с второго выхода датчика  . При величине uДУβ меньше величины ограничения
. При величине uДУβ меньше величины ограничения  по углу β ключ ЭК 21 разомкнут и управляющий сигнал на выходе ЭК 21 равен нулю. При величине выходного сигнала датчика ДУβ6 больше величины ограничения по углу b ключ ЭК 21 замыкается и на выходе ЭК 21 появляется сигнал, который поступает на вход датчика ДМβ17. Датчик ДМβ17 создает по оси подвеса импульсный момент величиной moβt и длительностью, равной времени, в течение которого
по углу β ключ ЭК 21 разомкнут и управляющий сигнал на выходе ЭК 21 равен нулю. При величине выходного сигнала датчика ДУβ6 больше величины ограничения по углу b ключ ЭК 21 замыкается и на выходе ЭК 21 появляется сигнал, который поступает на вход датчика ДМβ17. Датчик ДМβ17 создает по оси подвеса импульсный момент величиной moβt и длительностью, равной времени, в течение которого  . Таким образом производится изменение величины момента moβt по закону μoβt = f(t), показанному на фиг.4, и формирование длительности импульсов и периодичности их следования. В результате обеспечивается минимальная статическая ошибка ГИ в процессе разгона ГМ.
. Таким образом производится изменение величины момента moβt по закону μoβt = f(t), показанному на фиг.4, и формирование длительности импульсов и периодичности их следования. В результате обеспечивается минимальная статическая ошибка ГИ в процессе разгона ГМ.
Одновременно в процессе разгона ГМ устройство УУ 27 извлекает из блока БРП 29 величину  и передает ее в устройство АЛУ 26, где вычисляются величины действующего линейного ускорения и линейной скорости объекта вдоль оси чувствительности прибора.
и передает ее в устройство АЛУ 26, где вычисляются величины действующего линейного ускорения и линейной скорости объекта вдоль оси чувствительности прибора.
 ,
,
где ti и ti-1 текущие значения времени начала i-го и i-1-го шагов интегрирования.
В результате в процессе разгона ГМ обеспечивается устойчивая работа СМРК и определение линейной скорости объекта с минимизацией статической и динамической ошибок ГИ, т.е. существенно сокращается время готовности ГИ к использованию.
По достижении угловой скоростью вращения ротора 5 значения, равного ωo, из вычислителя В15 в преобразователь ЦАП 20 поступает сигнал, по этому сигналу преобразователь ЦАП выдает в реле Р11 команду, по которой реле Р размыкает контакты К2 и К3, т.е. происходит отключение преобразователя ЦАП от усилителя У и ключа ЭК от датчика ДМβ.
В установившемся режиме при изменении угловой скорости вращения ГМ на величину ± Δω = ω-ωo (например, из-за нестабильности частоты питания ГМ, момента трения в опорах ГМ, воздействия углового движения объекта) угловая скорость прецессии ГИ уменьшается (увеличивается) на величину  и сигнал на выходе датчика ДУα становится равным
и сигнал на выходе датчика ДУα становится равным ,
,
т.е. в нем появляется ошибка.
Одновременно с изменением величины угловой скорости вращения ГМ изменяется фаза сигнала скорости на выходе датчика ДС 12 по отношению к преобразованному опорному сигналу на выходе блока БЗ 23.
Сигнал скорости и преобразованный опорный сигнал поступают на входы блока БС14, где определяется фазовое рассогласование между этими сигналами.
Для повышения точности измерения фазового рассогласования опорный сигнал предварительно преобразуется в формирователе ФНП 22 в парафазный симметричный относительно нулевого уровня пилообразный сигнал, а в блоке БЗ23 импульсов осуществляется согласование момента формирования сигнала скорости с моментом пересечения пилообразным сигналом нулевого уровня.
С выхода блока БС14 сигнал, пропорциональный фазовому рассогласованию между сигналом скорости и опорным сигналом, преобразованным в пилообразный, поступает на первый вход вычислителя В15. На второй вход вычислителя 15 поступает сигнал, пропорциональный линейному ускорению движущегося объекта, вырабатываемый в блоке ДБ19, на вход которого подается с выхода датчика ДУα18 сигнал, пропорциональный линейной скорости движущегося объекта.
В вычислителе 15 определяется поправка  , которая после преобразования в устройстве СУ 16 подается на вход датчика ДМβ17, создающего по оси 7 подвеса момент, вызывающий увеличение (уменьшение) угловой скорости прецессии ГИ на величину
, которая после преобразования в устройстве СУ 16 подается на вход датчика ДМβ17, создающего по оси 7 подвеса момент, вызывающий увеличение (уменьшение) угловой скорости прецессии ГИ на величину  , в результате ее значение становится равным
, в результате ее значение становится равным  и на выходе датчика ДУα18 сигнал будет равен U. Таким образом происходит компенсация ошибки измерения, возникающей при движении объекта вследствие изменения величины угловой скорости вращения ГМ.
и на выходе датчика ДУα18 сигнал будет равен U. Таким образом происходит компенсация ошибки измерения, возникающей при движении объекта вследствие изменения величины угловой скорости вращения ГМ.
По сравнению с известным ГИ в предлагаемом ГИ благодаря введению последовательно соединенных датчика ДС, установленного на главной оси гироскопа, блока БС, вычислителя В, состоящего из преобразователя ПНК, микропроцессора МП, блока БП и таймера Т, устройства СУ и датчика момента ДМβ, закрепленного на оси подвеса, последовательно соединенных преобразователя ЦАП, вход которого соединен с вторым выходом вычислителя В и ключа ЭК, выход которого подключен к второму входу датчика ДМβ, блока ДБ, вход которого соединен с выходом датчика ДУα, расположенного на оси чувствительности, а выход соединен с вторым входом вычислителя В, и реле Р, вход которого подключен к второму выходу преобразователя ЦАП, а также соединению выхода датчика ДУα с третьим входом вычислителя В, выхода датчика ДС с четвертым входом вычислителя В, второго выхода датчика ДУβ, закрепленного на оси подвеса, с вторым входом ключа ЭК, второго входа блока БС через последовательно соединенные формирователь ФПИ и блок БЗ с шиной питания, причем через контакты реле Р соединены выход датчика ДУβ с первым входом усилителя У, третий выход преобразователя ЦАП с вторым входом усилителя У и выход ключа ЭК с вторым входом датчика ДМβ, сокращается время готовности ГИ в 4-5 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Интегратор линейных ускорений | 2020 |
|
RU2751051C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА | 1994 |
|
RU2104491C1 |
Использование: в гироскопическом приборостроении, в частности гироинтеграторах линейных ускорений (ГИ), и может быть использовано для измерения линейной скорости и ускорения движущегося объекта в инерциальных навигационных системах, как в установившемся режиме ГИ, так и в процессе разгона гиромотора. Сущность изобретения: ГИ содержит трехстепенной неуравновешенный гироскоп, систему межрамочной коррекции, состоящую из последовательно соединенных датчика угла, закрепленного на оси подвеса, усилителя и датчика момента, установленного на оси чувствительности прибора, последовательно соединенные датчик скорости, установленный на главной оси гироскопа, блок сравнения, вычислитель, состоящий из преобразователя напряжение-код, микропроцессора, блока памяти и таймера, согласующее устройство и датчик момента, закрепленный на оси подвеса, последовательно соединенные цифро-аналоговый преобразователь, вход которого соединен с вторым выходом вычислителя, и электронный ключ, выход которого подключен к второму входу датчика момента, закрепленного на оси подвеса, дифференцирующий блок, вход которого соединен с выходом датчика угла, расположенного на оси чувствительности, а выход соединен с вторым входом вычислителя, и реле, вход которого подключен к второму выходу цифро-аналогового преобразователя, при этом выход датчика угла, расположенного на оси чувствительности, соединен с третьим входом вычислителя, выход датчика скорости, установленного на главной оси гироскопа, подключен к четвертому входу вычислителя, второй выход датчика угла, закрепленного на оси подвеса, соединен с вторым входом электронного ключа, второй вход блока сравнения подключен через последовательно соединенные формирователь пилообразного напряжения и блок задержки с шиной питания, причем через контакты реле соединены выход датчика угла, закрепленного на оси подвеса, с первым входом усилителя, третий выход цифро-аналогового преобразователя - с вторым входом усилителя и выход электронного ключа - с вторым входом датчика момента, закрепленного на оси подвеса, что позволяет сократить время готовности гироинтегратора к использованию. 4 ил.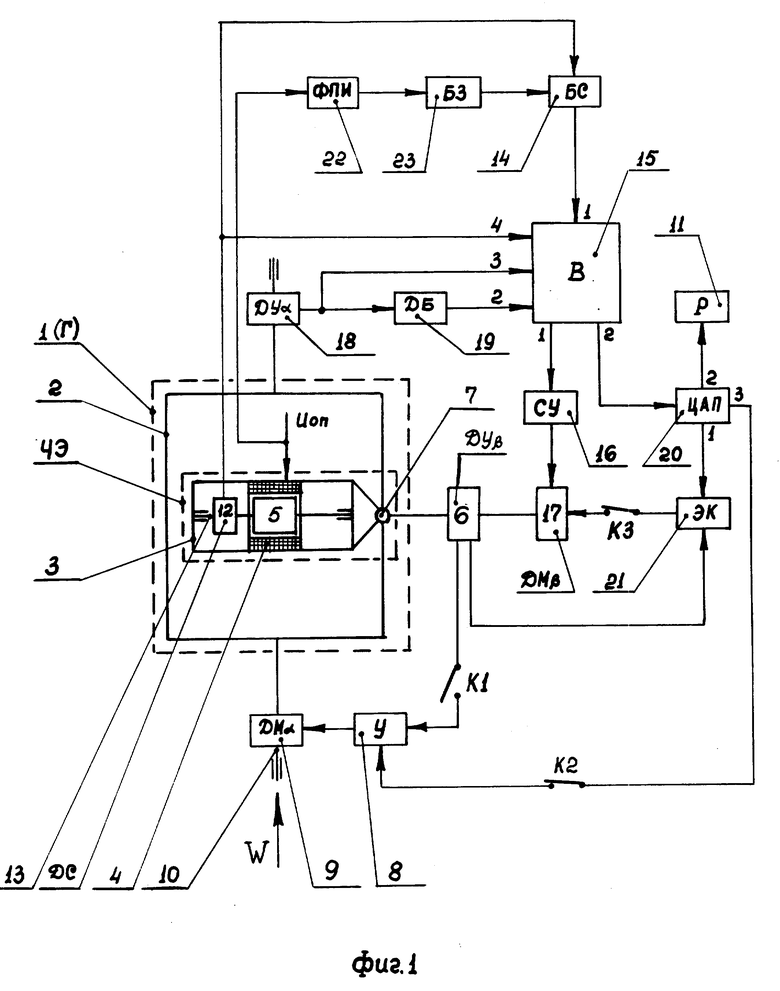
Гироинтегратор линейных ускорений, содержащий трехстепенной неуравновешенный гироскоп, систему межрамочной коррекции, состоящую из последовательно соединенных датчика угла, закрепленного на оси подвеса, усилителя и датчика момента, установленного на оси чувствительности, и датчик угла, расположенный на оси чувствительности, отличающийся тем, что введены последовательно соединенные датчик скорости, установленный на главной оси гироскопа, блок сравнения, вычислитель, состоящий из преобразователя напряжение код, микропроцессора, блока памяти и таймера, согласующее устройство и датчик момента, закрепленный на оси подвеса, последовательно соединенные цифроаналоговый преобразователь, вход которого соединен с вторым выходом вычислителя, и электронный ключ, выход которого связан с вторым входом датчика момента, закрепленного на оси подвеса, дифференцирующий блок, вход которого соединен с выходом датчика угла, расположенного на оси чувствительности, а выход с вторым входом вычислителя, и реле, вход которого подключен к второму выходу цифроаналогового преобразователя, при этом выход датчика угла, расположенного на оси чувствительности, соединен с третьим входом вычислителя, выход датчика скорости, установленного на главной оси гироскопа, подключен к четвертому входу вычислителя, второй выход датчика угла, закрепленного на оси подвеса, соединен с вторым входом электронного ключа, второй вход блока сравнения подключен через последовательно соединенные формирователь пилообразного напряжения и блок задержки к шине питания, причем через контакты реле соединены выход датчика угла, закрепленного на оси подвеса, с первым входом усилителя, третий выход цифроаналогового преобразователя с вторым входом усилителя и выход электронного ключа с вторым входом датчика момента, закрепленного на оси подвеса.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ягодкин В.В., Хлебников Г.А | |||
| Гироприборы баллистических ракет | |||
| - Воениздат, 1967, с.94 - 103 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Развитие механики гироскопических и инерциональных систем | |||
| - Наука, 1973, с.142 и 143 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Коновалов С.Ф., Никитин Е.А., Селиванова Л.М | |||
| Гироскопические системы | |||
| Акселерометры, датчики угловой скорости, интегрирующие гироскопы и гироинтеграторы | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Д.С.Пельпора | |||
| - М.: Высшая школа, 1980. | |||
