Изобретение относится к автоматике и вычислительной технике и служит для преобразования угла вала поворота в код. Известны cnoco&J преобразований угла поворота вала в код, основанные на двухтактном интегрировании, В качестве подынтегральных функций используются аналоговые сигналы входных и образцовых или опорных напряжений. Пределы интегрирования Зс1даются интервалами времени,причем окончание первого интервала являет ся началом второго 1. Наиболее «близким техническим ре шением к предлагаемому является способ преобразования угла поворота вала в код, в котором напряжения с синусно-косинусного датчика выпрямляют с помощью двух выпрямителей, затем напряжения, пропорциональные синусу и косинусу угла,сра нивают по абсолютной величине, мен iaee напряжение интегрируют в течени этгшонного времени, затем интегрируют большее напряжение с противоположным знаком до полумения задан ной величины напряжения, определяют величину временного интервала интегрирования большего напряженияи преобразуют его в код 2. Недостатком известных способов преобразования является значительная погрешность преобразования на-, пряжений с синусной и косинусной обмоток датчика в постоянные напряжения, осуществляемого перед первым циклом интегрирования, вынуждающая применять два выпрямителя. Цель изобретения - повышение точности преобразования угли поворота вала в код. Поставленная цель достигается тем, что сравнивают, синусное и косинусное напряжение, большее из которых выпрямляют, интегрируют опорное напряжение, обратное по знаку выпрямленному большему напряжению, в течение эталонного интервала времени, интегрируют большее напряжение до заданной величины, определяют и запоминают интервал времени его интегрирования, выпрямляют меньшее напряжение и интегрируют его за интервал времени интегрирования большего напряжения, интегрирукзт опорное напряжение, обратное по знаку меньшему выпрямленному напря9кению, до заданной величины и определяют -временной интервал его интег рирования, по величине которог о опре,целяют кол угла поворота вала.
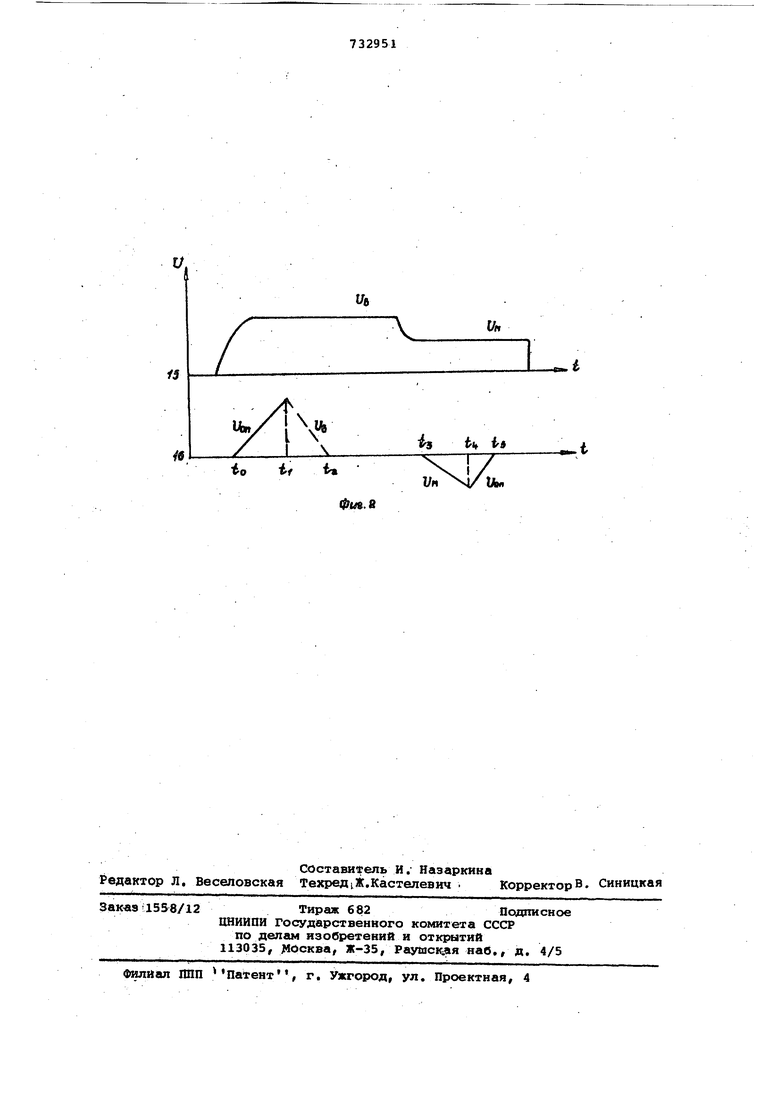
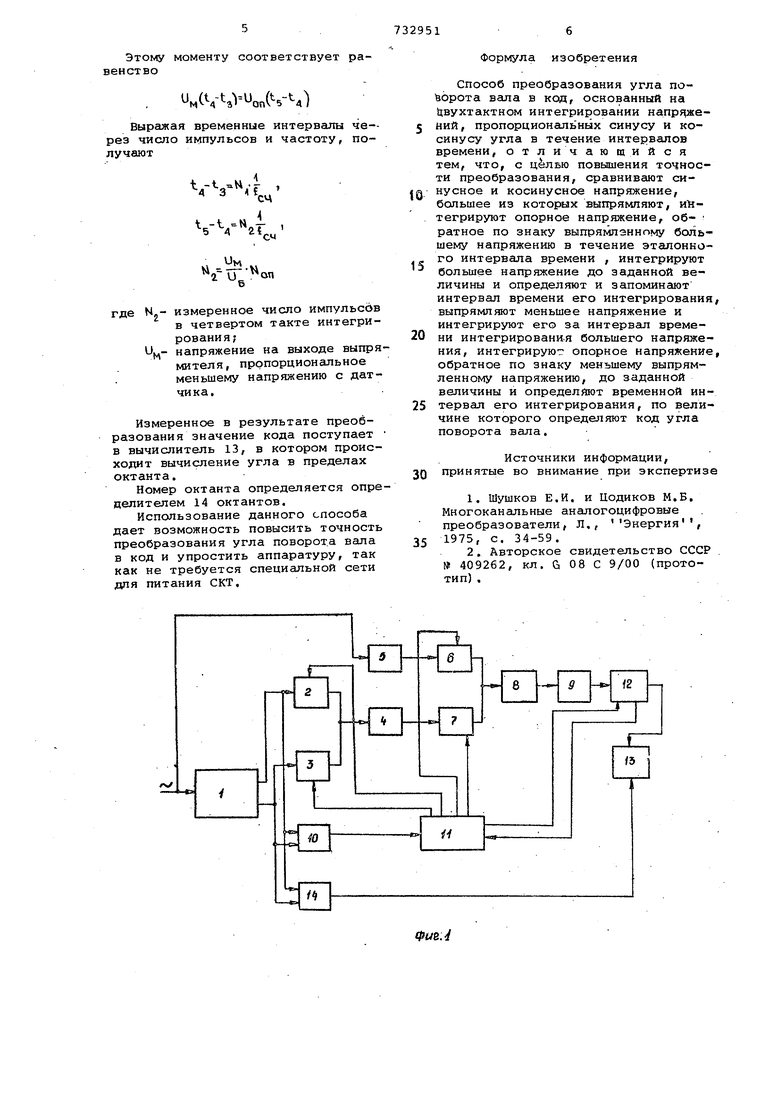
На фиг. 1 изображена блок-схема устройства, реализующего данный способ, а на фиг,. 2 - диаграммы работы устройства.. .
Блок-схема устройства содержит синусно-косинусный датчик 1, ключи 2 и 3, выпрямитель 4, опорный ис-. точник 5, ключевые элементы б и 7, интегратор 8, компаратор 9, блок. 10 сравнения/ блок 11 управления, . преобразователь 12, вычислитель 13, определитель 14 октантов.
На ди-аграммах показаны сигнал ;15 на выходе выпрямителя 4, сигнал 16 на выходе интегратора 8.
На вход синусно-косинусного датчика 1 и опорного источника 5 подают переменное напряжение синусоидальной формы/ напряжения с выхода синусно-косинусного датчика 1, пропорциональное синусу и косинусу угла поворота, через ключи 2 и 3 подключают к выпрямителю 4. Выходы выпрямителя 4 и опорного источника 5 через Юлючевые элементы б и 7 подключены на вход интегратора 8, к выходу которого подключен компаратор 9. Напряжения с датчика 1 поступают также на блок 10 сравнения и .определитель 14 октантов. Блок 11 управления управляет работой ключевых элементов 2,3, 6, и 7 и преобразователя 12. Вычисление.угла производится вычислителем 13.
Устройство работает следующим образом.
Блок 11 управления открывает один из ключевых элементов 2 или 3 и подключает большее напряжение на вход выпрямителя 4.
Сравнение напряжений и определение большего напряжения производится блоком 10 сравнения, который выдает сигнал в блок .11 управления.
Преобразователь 12 работает в двух режимах: в режиме преобразования кода во временной интервал и в режиме преобразования временного интервала в код.
После установления напряжения на выпрямителе 4 блок 11 управления открывает ключевой элемент 6 и выдает стар т -импульс на преобразователь 12, подключая н.а эталонное время напряжение с опорного источника 5 на вход интегратора 8. Напряжейие опорного источника 5 противоположно по знаку напряжению с выпрямителя 4.
После окончания эталонного времени с преобразова еля 12 поступает стоп-ийпульс на блок 11 управления, преобразователь 12 в этот момент переходит врежим преобразования временного интервала в код, Ключевой элемент 6 закрывается и
открывается ключевой элемент 7,под1слючая напряжение с выпрямителя 4 на вход интегратора 8.
При достижении напряжения определенной величины на выходе интег« ратора В компаратор 9 выдает стоп импульс на преобразователь 12, полученное в результате преобразования значение кода в преобразователе 12 запоминается.
О-Этому моменту соответствует равенство
МзлГ г oj l ef i J (см.фиг.2) Выражая временные интервалы через число импульсов и частоту, име5 ют
- -t К - - о оп.{
сч
и
О W
к.
on I
где (,ц - частота импульсов счета в преобразователе 12;
Коп- фиксированное число импульсов ;
измеренное число импульсов во втором такте интегрирования;
Ug- напряжение на выходе выпрямителя, пропорциональное большему напряжению с дат5чика.
,3атем блок 11 управления открывает другой ключевой элемент (2 или 3) и подключает меньшее напряжение на вход выпрямителя 4.
После установления напряжения на выпрямителе 4, блок 11 управЛе-ния открывает ключ 7, .подключая .напряжение с выпрямителя 4 на вход интегратора 8, и видает стоп-импульс на преобразователь 12.
В преобразователе 12 значение кода преобразуется во временной ин-. тервал,по окончании которого вы- дается стоп-импульс на блок 11 управления, преобразователь в этот момент переходит в режим преобразования временного интервала в код, а ключ 7 закрывается.
После этого блок 11 управления
открывает ключевой элемент 6 и подключает напряжение опорного источника 5 на вход интегратора В и выдает старт-импульс на преобразователь 12, где временной интервал преобразуется в код.
При достижении напряжения определенной величины на выходе интегратора В компаратор 9 выдает стопрмпульс на преобразователь 12.
Этому моменту соответствует равенство
UMCV4V%n(4-M
Выражая временные интервалы че-рез число импульсов и частоту, получают
,,
ilr on 6
где N.- измеренное число импульсов в четвертом такте интегрирования;
напряжение на выходе выпрямителя, пропорциональное меньшему напряжению с датчика.
Измеренное в результате преобразования значение кода поступает в вычислитель 13, в котором происходит вычисление угла в пределах октанта.
Номер октанта определяется определителем 14 октантов.
Использование данного способа дает возможность повысить точность преобразования угла поворота вала в код и упростить аппаратуру, так как не требуется специальной сети дпя питания СКТ.
Формула изобретения
Способ преобразования угла поворота вала в код, основанный на Двухтактном интегрировании на.пряркений, пропорционёшьных синусу и косинусу угла в течение интервалов времени, отличающийся тем, что, с повышения точности преобразования, сравнивают синусное и косинусное напряжение,
3 большее из которых выпрямляют, ийтегрируют опорное напряжение, об- ратное по знаку выпрямленному большему напряжению в течение эталонного интервала времени , интегрируют
5 большее напряжение до заданной величины и определяют и запоминают интервал времени его интегрирования, выпрямляют меньшее напряжение и интегрируют его за интервал време0ни интегрировани-я большего напряжения, интегрируют опорное напряжение, обратное по знаку меньшему выпрямленному напряжению, до заданной величины и определяют временной ин5тервал его интегрирования, по величине которого определяют код угла поворота вала.
Источники информации, принятые во внимание при экспертизе
1.Шушков Е.И. и Цодиков М.Б. Многоканальные аналогоцифровые преобразователи. Л,, Энергия,
1975, с. 34-59.
2.Авторское свидетельство СССР . 409262, кл. G 08 С 9/00 (прототип) .
«N/1
UN.
Vn
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1982 |
|
SU1101866A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1403373A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1145479A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА В КОД | 1973 |
|
SU409262A1 |
| Способ преобразования угла поворота вала в код | 1981 |
|
SU982049A1 |
| Способ преобразования угла поворотаВ НАпРяжЕНиЕ | 1978 |
|
SU807051A1 |
| Способ преобразования угла поворота вала в код | 1983 |
|
SU1124358A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1981 |
|
SU1840281A1 |