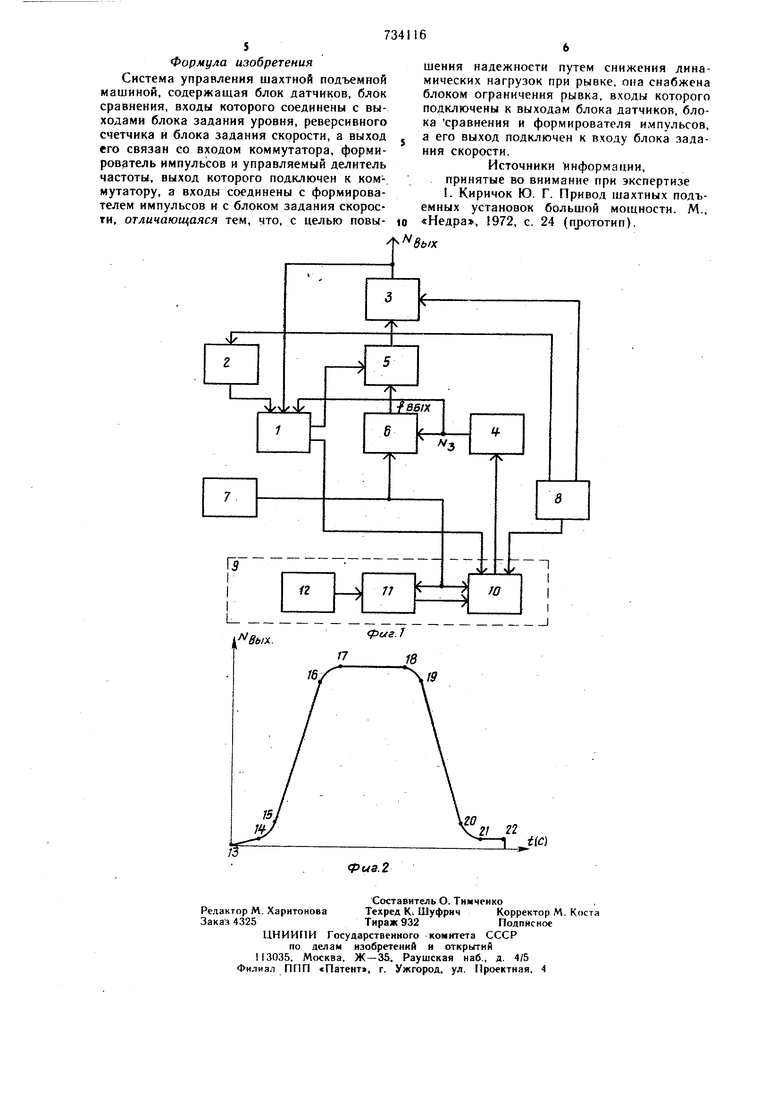
(54) СИСТЕМА УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ Изобретение относится .к области математического управления шахтными подъемными машинами и может быть использовано в цифровых и цифроаналоговых системах автоматического управления. Наиболее близким техническим решением к изобретению является система управления шахтной подъемной машиной, содержащая блок датчиков, блок сравнения, входы которого соединены с выходами блока задания уровня, реверсивного счетчика и блока задания скорости, а выход его связан со бходом коммутатора, формирователь импульсов и управляемый делитель частоты, выход которого подключен к коммутатору, а входы соединены с формирователем импульсов и с блоком задания скорости 1. Недостатком указанного устройства яв-ляется сравнительно невысокая надежность, обусловленная динамическими нагрузками, воспринимаемыми элементами подъемной машины при рывке. Целью изобретения является.повышение надежности путем снижения динамических усилий при рЬшке. Поставленная цель достигается тем, что предлагаемая система снабжена блоком ограничения рывка, входы которого подключены к -выходам блока датчиков, блока сравнения и формирователя импульсов, а его выход подключен к входу блока задания скорости. На фиг. 1 представлена блок-схема предлагаемой системы управления шахтной подъемной машиной; на фиг. 2 - тахограмма работы системы в координатах: выходной код - Nbi, и время - Ut). Система состоит из блока 1 сравнения, блока 2 задания уровня, реверсивного счетчика 3, блока 4 задания скорости, коммутатора 5, управляемого делителя 6 частоты, формировате.ая 7 импульсов, блока 8 датчиков и блока 9 ограничения рывка, который сортоит из блока 10 ключей, блока 11 управляемых делителей частоты и блока 12 ввода задания. Выходным элементом предлагаемого устройства является реверсивный счетчик 3, счетный вход которого подключен к вь1ходу коммутатора 5, а вход управления - к одному из выходов блока 8 датчиков. Выход реверсивного счетчика 3 связан с входом блока 1 сравнения, два других входа которого подключены соответственно к выходу блока 2 задания уровня и к выходу блока 4 задания скорости. Один из выходов блока сравнения подключен на управляющий вход коммутатора 5, а другой - на вход блока 10 ключей., Вход блока 2 задания уровня соединен с выходом блока 8 датчиков. Второй вход коммутатора 5 связан с выходом управляемого делителя 6 частоты, счетный вход которого соединен с выходом формирователя импульсов, а вход управления - с выходом блока 4 задания скорости, вход последнего соединен с выходом блока 10 ключей. Один из входов блока Ю соединен с одним из выходов блока I, три других входа подключены соответственно к выходам формирователя 7 импульсов, блока 8 датчиков и блока 11 управляемых делителей частоты. Счетиый вход блока 11 связан с выходом формирователя 7 импульсов, а управляющий вход - с выходом бдока 12 ввода задания. Начальной точкой тахограммы является точка 13. Точкой 14 огрйничен начальный участок 13-14. Точкой 15 ограничен участок 14-15 задания рывка, который далее имеет линейную часть, ограниченную точкой 16. Далее расположены криволинейный участок, ограниченный точкой 17, и линейная часть кривой, параллельная оси t , ограниченная точкой 18, которая является точкой начала замедления. Следующий за ней криволинейный участок ограничен точкой 19, за которой расположен линейный участок вплоть до точки 20, за которой расположен криволинейный участок до точк 1 21, соединенной прямой с точкой 22, являющейся точкой возврата схемы в исходное состояние. Устройство работает следующим образом. Формирователь 7 импульсов дает на выходе импульсы с постоянной частотой. Блок 8 датчиков выдает сигналы в начале работы устройства, точка 13 - в точке начала замедления 18 и в точке стопорения 22. Блок 12 ввода задания осуществляет задание величины рывка на участках от точки 14 до точки 15, от точки 16 до точки 17, от точки 18 до точки 19 и от точки 20 до точки 21. Блок 2 задает максимальный уровень выходного сигнала на участке от точки 17 до точки 18, уровень дотяжки от точки 21 до точки 22, задает уровень начала изменения ускорений точек 14, 16, 20 и определяет наклон участков от точки 13 до точки 14, от точки 15 до точки 16, от точки 19 до точки 20. В исходном состоянии блок 4 задания скорости имеет на выходе код Ni, соответствующий ускорению участка от точки 13 до точки 14. Сигнал начала работы поступает от блока 8 датчиков, коммутатор 5 дает разрещение на прохождение сигнала с управляемого делителя 6 частоты на вход сложения реверсивного счетчика 3. Блок 1- осуществляет сравнение выходного числа реверсивного счетчика 3 с числом блока 2 Задания уровня и при достижении равенства, т. е. при достижении уровня точки 14 (фиг. 2) блок I дает сигнал на блок 10 ключей, который подключает к блоку 4 задания скорости блок И, управляемых делителей частоты, частота которого определяет рывок на участке от точки 14 до точки 15. Входная часть блока II определяется кодом блока 12 ввода задания. Таким образом, число Nj на участке от точки 14 до точки 15 в течение определенного времени меняется от значения, определяющего ускорение на участке от точки 14 до точки 3, до значеиия, определяющего ускорение на участке от точки 15 до точки 16. В точке 15 блок 1 выдает сигнал на блок 10, который накладывает загГрет на прохождение сигнала от блока 1J к блоку 4 задания скорости. Число Nj на участке от точки 16 до точки 15 остается постоянным и определяет его крутизну. В точке 16 блок 1 сравнения при равенстве числа в реверсивном счетчике 3 и числа блока 2 задания уровня дает команду на блок 10 ключей, который подключает к блоку задания скорости делитель частоты блока 11 управляемых делителей частот, определяющий рывок на участке от точки 16 до точки 17. В точке 17 при аналогичном сравнении блок I сравнения через коммутатор 5 накладывает Запрет на прохождение сигнала к реверсивному счетчику 3. На протяжении всего участка от точки 17 до точки 18 выходной код реверсивного счетчика 3 остается постоянным. В точке 16 сигнал с блока 8 датчиков поступает на счетчик 3, на блок 10 ключей, на блок 2 задания уровня. В результате коммутатор 5 подключает управляемый делитель 6 частоты на вход вычитания реверсивного счетчика 3, блок 10 дает разрешение на прохождение сигнала от делителя частоты блока 11 управляемых делителей частот, определяющего рывок на участке от точки 18 до точки 19, на блок 4 задания, скорости, блок 2 задания уровня переключается с участка от точки 13 до точки 17 на участок от точки 18 до точки 22. Начало изменения ускорения в точке 18 определяется сигналом с блока 8 датчиков, Дальнейщая работа устройства аналогична указанной. В точке 22 сигнал с блока 8 возвращает схему в исходное состояние. Применение предлагаемой системы автоматического управления шахтными подъемными мащинами позволяет более полно использовать нагрузочную способность подъемного двигателя и тяговое усилие канатоведущего шкива (при многоканатном подъеме), уменьшить износ футеровки барабана, увеличить срок службы каната. Все это приводит к повыщению экономичности работы подъемной машины, т. е. к уменыиению расхода электрической энергии и эксплуатационных затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU813374A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Цифровое устройство задания скорости дляОРгАНичиТЕлЕй СКОРОСТи шАХТНОй пОд'ЕМНОйМАшиНы | 1979 |
|
SU835919A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1059012A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Цифровое задающее устройство | 1981 |
|
SU983123A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
