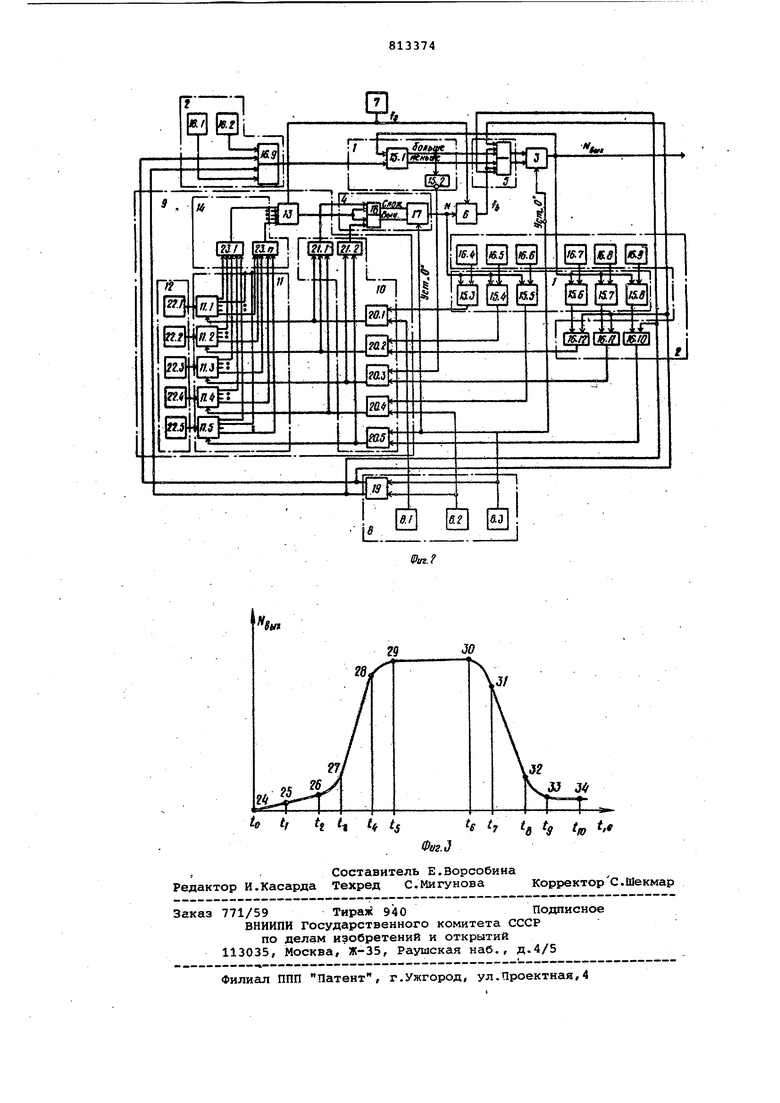
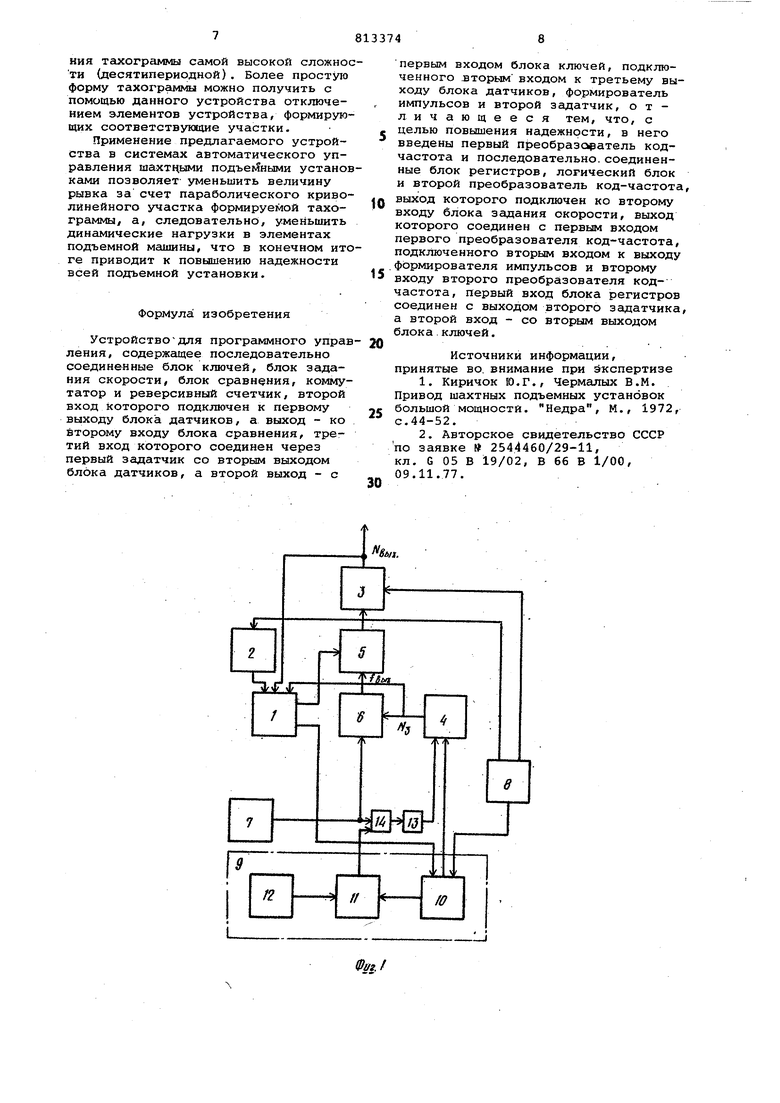
Устройство относится к автоматическому управлению шахтными подъемными машинами и может быть использов но в цифроаналоговых и цифровых системах автоматического управления в качестве программного устройства задания скорости. Известны устройства программного управления, которые используют принцип механического интегрирования jj Недостатки этих устройств - низкая точность, малая надежность, наличие подвижных частей. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство, содержащее блок датчиков, блок сравнения, входы которого соединены с вы ходами блoJ«a задания уровня,peBep-h сивного счетчика и блока задания скорости, а выход его связан со входом коммутатора, формирователь импульсов и управляемый делитель частоты, выход которого подключен к коммутатору, а входы соединены с фор мирователем импульсов и с блоком задания скорости, а также блок ограничения рывка, входы j OToporo подключе ны к выходам блока датчиков, блока ..„ , сравнения и формирователя импульсов, а его выход подключен к входу блока задания скорости, причем блок ограничения рывка состоит из блока ключей, блока управляемых делителей частоты и блока ввода задания 23. Недостаток этого устройства - наличие в блоке ограничения рывка блока управляемых кодом делителей частоты, количество которых определяется числом криволинейных участков задаваемой тахограмьи, что значительно усложняет устройство и снижает его надежность . Формирование выходного числа на криволинейных участках тахограммы осуществляется посредством последовад льно включенных управляемого делителя частоты, счетчика реверсивного в блоке, управляемого делителя частоты, счетчика реверсивного. Это :обеспечивает логарифмический закон изменения выходного числа. Математический анализ работы та1КОГО устройства показывает, что при этом обеспечивается получение логарифмического закона изменения выходного числа. Частота на выходе управляемого делителя частоты при формиро вании рывка тахограммы определяется t -2, где f - этсшонная частота формиров теля импульсов; N - число, задающее величину рывка. Число на вьохрде реверсивного сче чика 4 изменяется по закону: -J dtЬЫХ. ft . Частота на выходе управляемого . делителя частоты определяется выражением с учетом (2) а число на выходе реверсивного счет чика, т.е. на выходе устройства с учетом (3) изменяется по закону f«adt J: dt -N -ent Таким образом, выражение (4) показываетf что число на выходе изрестного устройства изменяется во времени по логарифмическому закону Цель изобретения - повышение надеж|}ости работы шахтных подъемных установок путем снижения динамических нагрузок при рывке за счет формирования параболических участков тахограммы заданной скорости. Поставл«5нная цель достигается тем, что в ус ройство для программн го управления содержащее последовательно соединенные блок ключей,блок задания скорости, блок сравнения, коммутатор и реверсивный счетчик, второй вход которого подключен К первому выходу блока датчиков, а вы ко второму входу блока сравне ния) третий вход которого соединен через первый задатчик со вторым выходрм блока датчиков, а вт.орой выход - с первым входом блока ключей подключенного вторым входом к треть му выходу блока датчиков, формирова пель импульсов, и второй эадатчик, введены первый преобразователь кодчастота и последовательно соединенные блок регистров, логический блок и второй преобразователь код-частот выход которого подключен ко второму входу блока задания скорости, выход которого соединен с первым входом первого преобразователя код-частота, подключенного вторым входом к выходу формирователя импульсов и второму входу второго преобразователя кодчастота, первый вход блока регистров соединен с выходом второго задатчика, а второй вход - со вторым выходом блока ключей. На фиг.1 представлена функциональная схема устройства; на фиг.2 структурная схема; на фиг.З - формируемая тахограмма. Устройство содержит блок 1 сравнения, первый задатчик 2, счетчик 3 реверсивный, блок 4 задания скорости , коммутатор 5, первый преобразо.ватель & код-частота, формирователь 7 импульсов, блок 8 датчиков, блок 9 ограничения рывка, блок 10 ключей, блок 11 регистров, второй задатчик ; 12, второй преобразователь 13 кодчастота и логический блок 14. Блок 1 сравнения состоит из злементов 15.1-15.8-сравнения, задатчик 2 состоит из элементов 16.1-16.8 памяти и элементов 16.9-16.12 совпадения, блок 4 состоит из счетчика 17,. Коммутатора 18, блок 8 датчиков состоит из датчиков 8.1-8.3 и триггера 19, блок 10 ключей состоит из триггеров 20.1-20.5 и сумматоров 21.1-21.2, блок регистров включает пять регистров 11.1-11.5, задатчик 12 состоит из элементов совпадения 22.1-22.5/ блок 14 состоит из элементов разделения ,23.1-23.и. Устройство работает следующим образом. Формирователь 7 импульсов дает на выходе импульсы с постоянной частотой. .Блок 8 выдает сигналы в начале работы устройства (точка 24)j, в точке 30 начала замедления и в точке 34 стопорения. Задатчик 12 осуществляет задание величины рывка на участках от точки 24 до точки 25, от точки 26 до точки 27, от точки 28 до точки 29,от точки точки 31, от точки 32 до . точки ЗЗ ГЗадатчик 2 задает максима- I льный уровень выходного сигнала на участке от точки 29 до точки 30, уровень дотяжки от точки 33 до точки 34, задает уровни начала изменения ускорения точек 25,27,31 и определяет наклоны участков этими элементами от ;точки 25 до точки 26, от точки 27 до .точки 28, от точки 31 до точки 32. Начала криволинейных участков определякзтся числами, вводимыми соответственно устройствами 16.7-16.9 зада ния. В исходном состоянии выходное число N блока 4 задания скорости и выходное число счетчика 3 равно нулю.Триггеры 20.1-20.5 блока 10 и триггер 19 блока 8 находятся в нулевом состоянии, в блок 1 сравнения введено число с 16.2, соответствующее максимальной скорости, а числа с элементов 16.4-16.9, задающи соответствующие величины наклонов и величины скоростей, соответствугацих началам криволинейных-участков тахограммы. Элементы 16.11 и 16.12 совпадения открыты, к16.10 - закрыт. Коммутатор 5 подключает счетчик 3 иа сложение. Формирователь импульсов 7 выдает импульсы частотой fy иа преобразователи код-частота 13 и 6. Сигнал начала работы поступает с блока 8 датчиков. При этом триггер 20.1 переходит в единичное состояние и число с элемента 22.1 через регист 11.1 поступает на вход преобразователя 13 код-частота. Одновременно че рез сумматор 21.1 и коммутатор 18 счетчик 17 коммутируется на сложение На выходе преобразователя 13 формируются импульсы, частота которых f пропорциональна входному коду, зала ваемому с элемента 22.1: где На - входное число, Зсщаваемов 22.1; Ng - Числовая емкость сумматора преобразователя 13; fg -.этгш9нная частрта формирователя 7 импульсов. На выходе устройства 4 задания скорости (счетчика реверсивного) число изменяется по закону . ci Код числа N/ поступает на вход преобразователя 6, на выходе которо го формируются импульсы частотой f. определяемые выражением «с, что соответствует параболическому закону изменения тахогрс1ммы иа первом криволинейном участке. При равенстве N и числа, задающего величину наклона участка 25-26 элемент 15. 3 вырабатывает сигнал и переводит триггер 20.1 в нулевое со стояние, в результате чего отклю4ается вход преобразователя 13 и вход Сложение счетчика 17. Число на выходе 4 остается на участке 25-26 постоянным и равным HI (t ). Число «а выходе счетчика 3 для участка 25-26 изменяется по выражению , ) э Л%) « b --f-Vt -d --V:r--. что соответствует линейному закону изменения числа ЕО времени. Величина наклона определяется числом N вводимым элементом 16.4. При равенстве .c числом, зещаваемым элементом 16.7, на выходе элемента 15.6 вырабатывается сигнгш и триггер 20.2 переводится в единичное состояние, в результате чего число с элемента 22.2, задающего величину рывка на участке 26-27, вводится в преобразователь 13, выход которого подключается на вход Сложение счетчика 17. При равенстве числа, задгиощего значение максимальной скорости с элемента 16.2 сигнал Больше на выходе элемента 15.1 исчезает и вход Сложение счетчика 3 коммутатором 5 отключается. На выходе счетчика 3 хранится постоянное число riffiax, соответствующее максимальной скорости формируемой тахограммы. Одновременно элементом 15.2 триггер 20.3 перево цится в исходное нулевое состояние. Момент начала замедления точки 30 определяется сигналом с датчика 8.2 1начала замедления, в результате чего триггер 20.4 переходит в единичное состояние и в преобразователь 13 вводится число с элемента 22.4, задающего величину рывка на участке 30-31. Одновременно триггер 19 переводится в единичное состояние, при этом в элемент 15.1 вводится число :с элемента 16.1, задающего величину скорости дотяжки, на выходе элементу 15.1 появляется сигнал Меньше и выход преобразователя 6 подключается через коммутатор 5 на вход Вычитание счетчика 3. Одновременно запираются элементы 16.11 и 16.12 и отпирается элемент 16.10. ; Таким образом, начинается формирование участка замедления тахограммы. Порядок переключения элементов устройства при переходе с формирования одного участка тахограммы на другой аналогичен. Окончание цикла формирования тахограммы осуществляется подачей сигнала с датчика стопорения 8.3, в результате чего триггеры 20.5 и 19 устанавливаются в нулевое состояние и все элементы схемы приходят в исходное состояние. Одновременно счетчики 17 и 3 устанавливеиотся в нулевое состояние. Схема устройства готова к формированию следующего цикла тахограммы. Схемой предлагаемого устройства рредусмстрена возможность формирования тахограммы самой высокой сложно ти (десятипериодной). Более простую форму тахограммы можно получить с помощью данного устройства отключением элементов устройства, формирую щих соответствующие участки. Применение предлагаемого устройства в системах автоматического управления шахтцыми пoдъe ными устано ками позволяет уменьшить величину рывка за счет параболического криво линейного участка формируемой тахограммы, а, следовательно, уменьшить динамические нагрузки в элементах подъемной машины, что в конечном ит ге приводит к повышению надежности всей подъемной установки. Формула изобретения Устройстводля программного упра ления, содержгидее последовательно соединенные блок ключей, блок задания скорости, блок сравнения, комму татор и реверсивный счетчик, второй вход которого подключен к первому выходу блока датчиков, а выход - ко второму входу блока сравнения, третий вход которого соединен через первый задатчик со вторым выходом блока датчиков, а второй выход - с первым входом блока ключей, подключенного .вторым входом к третьему выходу блока датчиков, формирователь импульсов и второй задатчик, отличающееся тем, что, с целью повышения надежности, в него введены первый преобразоратель кодчастота и последовательно, соединенные блок регистров, логический блок и второй преобразователь код-частота, выход которого подключен ко второму входу блока задания скорости, выход которого соединен с первым входом первого преобразователя код-частота, подключенного вторым входом к выходу формирователя импульсов и второму входу второго преобразователя кодчастота, первый вход блока регистров соединен с выходом второго задатчика, а второй вход - со вторым выходом блока.ключей. Источники информации, принятые во. внимание при экспертизе 1.Киричок Ю.Г., Чермалых В.М. Привод шахтных подъемных установок большой мощности. Недра, М., 1972, с.44-52. 2.Авторское свидетельство СССР по заявке 2544460/29-11, кл. G 05 В 19/02, В 66 В 1/00, 09.11.77.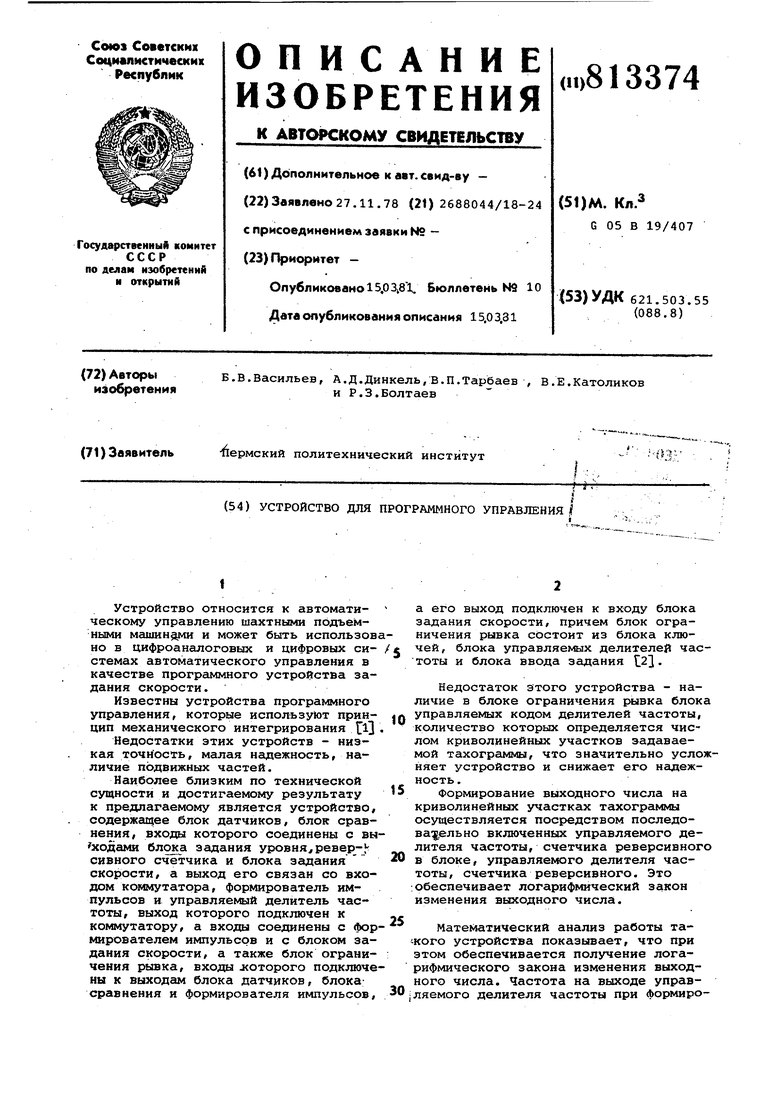
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Система управления шахтной подъемной машиной | 1977 |
|
SU734116A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |