Изобретение относится к автоматическому управлению шахтными подъемными машинами и может быть использовано в цифро-аналоговых и цифровых системах автоматического управления в качестве программного устройства задания скорости.
Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные блок «лючей, блок задания скорости, блок сравнения, коммутатор и реверсивный счетчик, второй вход которого подключен к первому выходу блока датчиков, а выход - ко второму входу блока сравнения, третий вход которого соединен через первый задатчик со вторым выходом блока датчиков, а второй выход - с первым входом блока ключей, подключенного вторым входом к третьемувыходу блока датчиков, формирователь импульсов и второй задатчик, первый преобразователь код-частота и последовательно соединенные блок регистров, логический блок .и второй преобразователь код-частота, выход которого подключен ко второму входу блока задания скорости, выход которог;о срединен с первым входом первого
преобразователя код-частота, подключенного вторым входом к .выходу формирователя импульсов и второму входу второго преобразователя код-частота, первый вход блока регистров соединен с выходом второго задатчика, а второй вход - со вторым выходом блока ключей 1.
Однако это устройство имеет низ10кие функциональные возможности из-за невозможности плавного ручного вмешательства оператора в процесс формирования выходного кода. В известном устройстве имеется блок задания уров15ня, который задает максимальную скорость и скорость дотяжки, а также ускорения и замедления, но при этом каждый параметр задается отдельным своим устройством ввода задания. Для
20 обеспечения плавного ручного вмешательства в работу программного устройства в данном случае требуется одновременное изменение уставок нескольких устройств ввода задания,
25 причем заранее рассчитанных, что практически осуществить невозможно. В устройстве блок задания уровня предназначен для настройки конкретной, только одной программы движе-
30 ВИЯ шахтной подъемной машины. Для
перехода на какую-либо другую диаграмму движения необходимо изменение уставок всех устройств ввода задания. Можно регулировать выходной код известного устройства изменением только уставки устройства ввода задания максимальной скорости, но в данном случае управление не будет плавным и в задаваемой диаграмме движения могут появиться участки с рывками, превышающими допустиг ые.
Цель изобретения - раопирение функциональных возможностей, устройства путем введения возможности плавного ручного вмешательства оператора в процесс формирования выходного кода.
Поставленная цель достигается тем, что в устройство для программного управление введены третий и четвертый преобразователи код-частбта, преобразователь частота-код и датчик угол поворота-код, соединенный выходом с первым входом третьего преобразователя код-частота, подключенного вторым входом к выходу формирователя импульсов, а выходом - к первому входу четве|Е того преобразователя код-частота, связанного вторым входом с выходом ревер- , сивного счетчика, а выходом - со входом преобразователя частота-код.
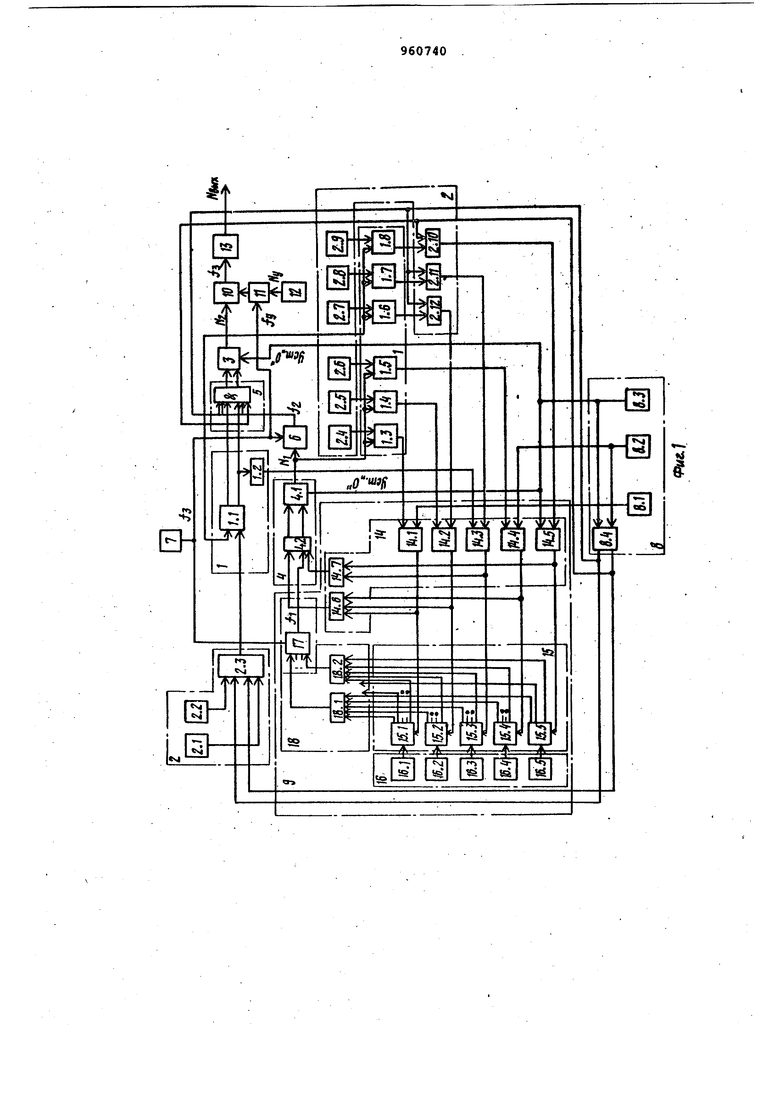
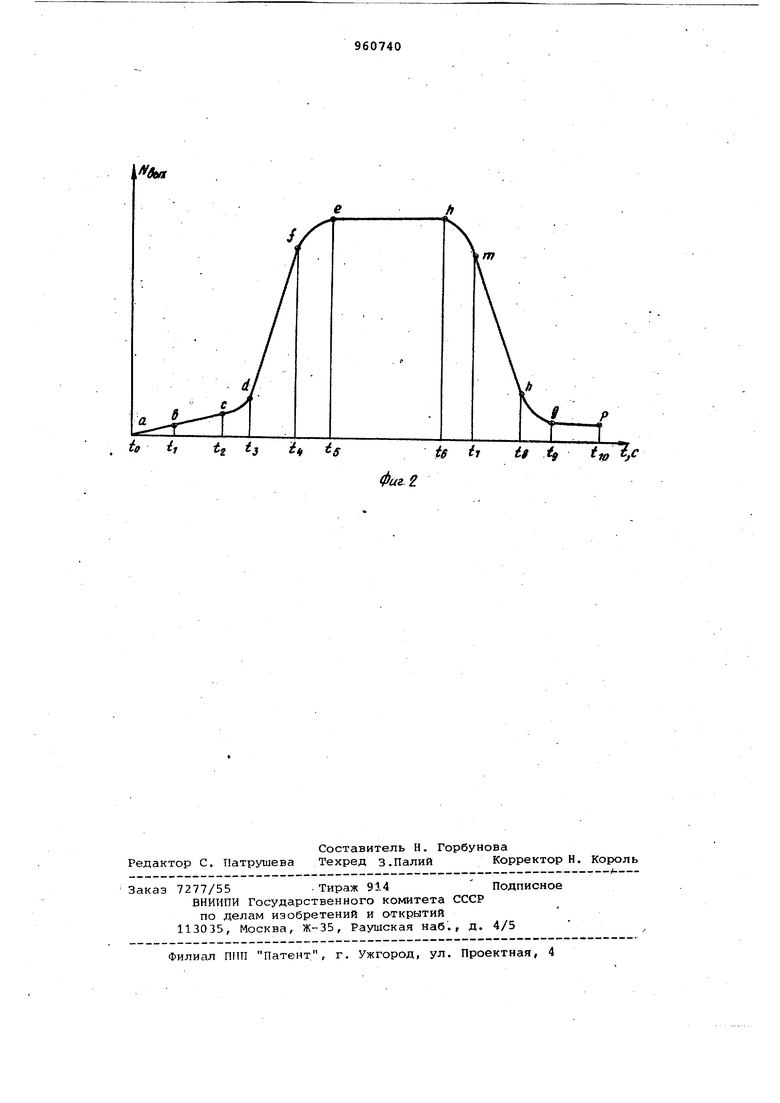
На фиг. 1 дана структурная схема устройства, на фиг. 2 - тахограмма.
Устройство-содержит блок. 1 сравнения, первый задатчик 2, реверсивный счетчик 3, .блок 4 задания скорости, коммутатор 5, первый преобразователь код-частота б, формирователь 7 импульсов, блок 8 датчиков, блок Э ограничения рывка четвертый преобразователь код-частота 10/ третий преобразователь код-частота 11, датчик угол поворота-код 12, преобразователь частота-код 13, блок 14 ключей, блок 15 регистров, второй задатчик 16, второй преобразователь код-частота 17, логический блок 18.
Блок 1 состоит из элементов 1.11.8 сравнения, блок 2 .состоит из элементов 2.1-2.9 памяти и элементов 2.10-2.12 совпадения, блок 4 состоит из счетчика 4.1 и коммутатора 4.2, блок 8 состоит из датчиков 8.1-8.3 и триггера 8.4, блок 14 состоит из триггеров 14.1-14.5 и сумматоров 14.6-14.7, блок 15 состоит из регистров 15.1-15.5, блок 16 состоит из элементов 16.1-16.5 совпадения, блок 18 состоит из элементов 18.118.2 разделения.
Устройство работает следующим образом.
Формирователь 7 импульсов выдает на выходе импульсы с постоянной частотой . Блок 8 датчиков выдает сигналы (фиг. 2) в начале работы устройства точка а, в точке начала замедления h и в точке стопорения р. Второй задатчик 16 осуществляет задание величины рывка на участках от точки а до точки b (элемент 16.1) от точки с до точки d (элемент 16.2), от точки до точки е (элемент 16.3), от точки h до точки m (элемент 16.4), от точки h до точки g (элемент 16.5).
Первый задатчик 2 задает максимальный уровень выходного, сигнала на участке от точки е до точки h (эле-- мент 2.2), уровень дотяжки от точки / g до точки р (элемент 2.1), задает
уровни начала изменения, ускорений
точки Ь, d, m (элемент 2.4, 2.5, 2.6) и определяет наклоны участков этими элементами от точки b до точки с, от точки d до точки ,. от точки m до
h. Начала криволинейных участКОВ(точки с, f, h) определяются чисJicLMK, вводимыми соответственно элементами 2.7-2.9. . В исходном состоянии выходное число N блока 4 задания скорости и выходное число N счетчика 3 равно нулю. Триггеры 14.1-14.5 блока 14 и триггер 8.4 блока 8 находятся в нулевом состоянии. В блок 1 сравнения введено число с элемента 2.2, соответствующее максимальной скорости, а также числа с элемента 2.4-2.9, задающие соответствующие величины наклонов и величины скоростей, соответствующих началам криволинейных участков тахограммы. Схемл совпадения 2.11 и 2.12 открлты, а 2.10 зак;Еаата. Коммутатор 5 подключает счетчик 3 на сложение. Формирователь 7 импульсов выдаёт импульсы частотой fg на преобразователи код-частота 17 и 6.
Сигнал начала работы поступает с датчика 8.1. Пр.и этом триггер 14.1 переходит в единичное состояние и
число с элемента 16.1 ввода задания через ключ 15.1 поступает на вход второго, преобразователякод-частота 17. Одновременно через сумматор 14.6 и коммутатор 4,2 счетчик 4.1 коммутируется на сложение. На выходе второго преобразователя 17 формируются импульсы, частота которых f пропорциональна входному коду, задаваемому с элемента 16.1
f - N 3 IL -t
где N -входное число, задаваемое
элементом 16.Ij
N.. -числовая емкость суммато ра второго преобразователя
код-частота 17;
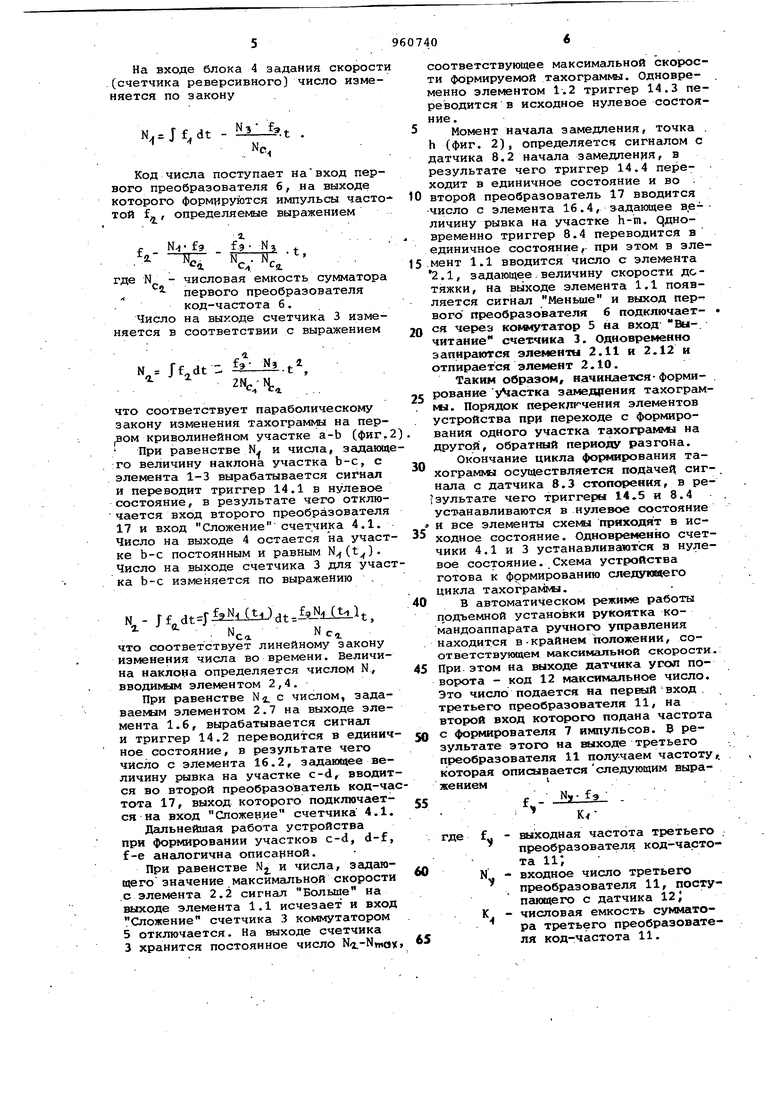
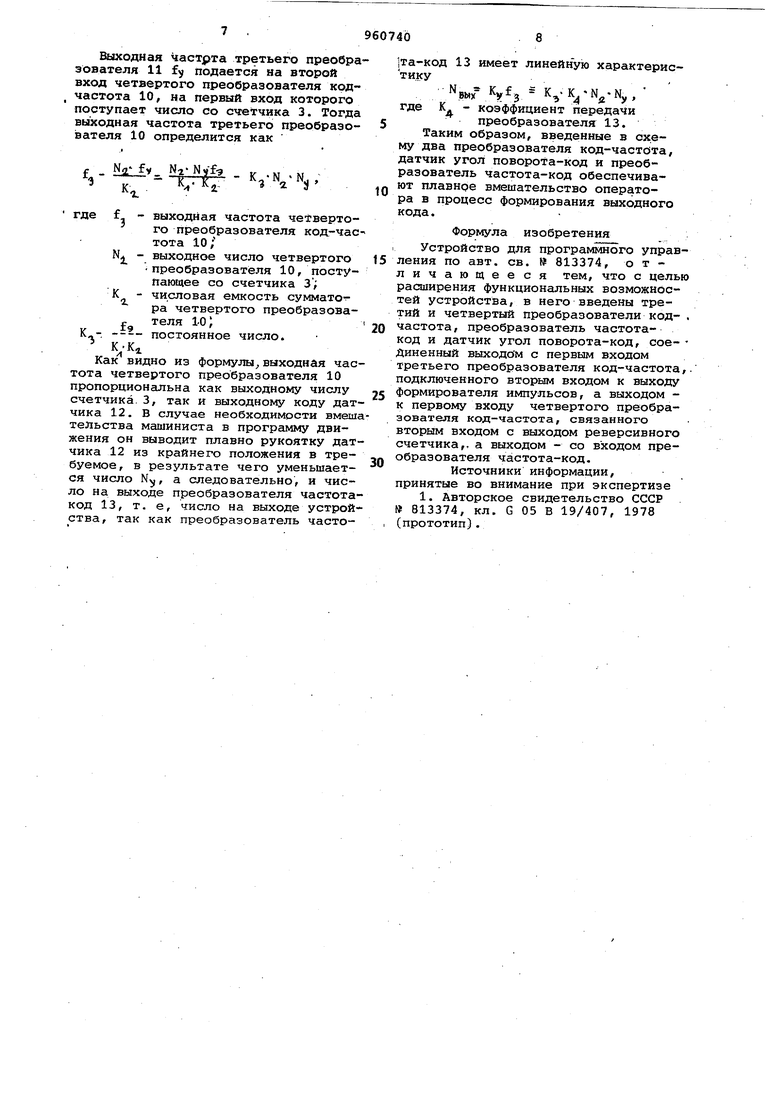
-эталонная частота формирователя 7 импульсов. На входе блока 4 задания скорос .(счетчика реверсивного) число изме няется по закону N. - .t . .. Код числа поступает навход пер вого преобразователя 6, на выходе которого формиру ЕОТся импульсы часто той f-, определяемые выражением f f3 9- N, . кг M КГ -a. C Ca. где Np - числовая емкость сумматор первого преобразователя код-частота 6. Число на выходе счетчика 3 изменяется в соответствии с выражением N. 2 Н:, что соответствует параболическому закону изменения тахограммы на пер|Вом криволинейном участке а-Ь (фиг При равенстве NJ и числа, задаки :го величину наклона участка Ь-с, с элемента 1-3 вырабатывается сигнал и переводит триггер 14.1 в нулевое состояние, в результате чего отключается вход второго преобразователя 17 и вход Сложение счетчика 4.1. Число на выходе 4 остается на участ ке Ь-с постоянным и равным N(t). Число на выходе счетчика 3 для учас ка Ь-с изменяется по выражению N - J dlii dt -.,. t, - Ne, Nc что соответствует линейному закону изменения числа во времени. Величина наклона определяется числом N, ввоячмазл элементом 2,4. При равенстве N, с числом, задаваемым элементом 2.7 на выходе элемента 1.6, вырабатывается сигнал и триггер 14.2 переводится в единич ное состояние, в результате чего число с элемента 16.2, задающее величину рывка на участке c-d, вводит ся во второй преобразователь код-ча тота 17, выход которого подключается на вход Сложение счетчика 4.1 Дгшьнейшая работа устройства при формировании участков c-d, d-f -е аналогична описанной. При равенстве Nj и числа, задающего значение максимальной скорости .с элемента 2.2 сигнал Больше на выходе элемента 1.1 исчезает и вход Сложение счетчика 3 коммутатором 5 отключается. На выходе счетчика 3 хранится постоянное число N-t-Nwo соответствующее максимальной скорости формируемой тахограммы. Одновременно элементом 1.2 триггер 14.3 переводится в исходное нулевое состояние . Момент начала замедления, точка . h (фиг. 2), определяется сигналом с датчика 8.2 начала замедпення, в результате чего триггер 14.4 переходит в единичное состояние и во второй преобразователь 17 вводится число с элемента 16.4, задающее ве- личину рывка на участке h-m. рдновременно триггер 8.4 переводится в единичное состояние, при этом в элемент 1.1 вводится число с элемента 2.1, задающее,величину скорости дотяжки, на выходе элемента 1.1 появляется сигнал Меньше и выход первого преобразователя 6 подключает- ся через коммутатор 5 на вход Вы-, читание счетчика 3. Одновременно запираются элементы 2.11 и 2.12 и отпирается элемент 2.10. Таким образом, начинается-форми- . рование участка замещ1ения тахограммл. Порядок переключения элементов устройства при переходе с формирования одного участка тахограммы на другой, обратный периоду разгона. Окончание цикла фос ирования тахограммы осуществляется подс1чей сигнала с датчика 8.3 стопорения, в результате чего триггеры 14.5 и 8.4 устанавливаются в .нулевое состояние и все элементы схемы приходят в исходное состояние. Одновременно счетчики 4.1 и 3 устанавливаются в нулевое состояние. Схема устройства готова к формированию следующего цикла тахограммы. В автоматическом р ежиме работы цодъемной установки рукоятка командоаппарата ручного управления находится вкрайнем положении, соответствующем максимальной скорости.: При. этом на выходе датчика угол поворота - код 12 максимальное число. Это число подается на первыйвход . третьего преобразователя 11, на второй вход которого подана частота с формирователя 7 импульсов. В результате этого на выходе третьего преобразователя 11 получаем частоту,, которая описываетсяследующим выражениемNV э где .. выходная частота третьего преобразователя код-частота и; входное число третьего преобразователя 11, поступающего с датчика 12 J числовая емкость сумматора третьего преобразователя код-частота 11. Выходная частрта третьего преобра зователя 11 fy подается на второй вход четвертого преобразователя кодчастота 10, на первый вход которого поступает число со счетчика 3. Тогда выходная частота третьего преобраэователя 10 определится как f.y,Sf.,.,., где f - выходная частота чеФвертого преобразователя код-час тота 10/ N. - выходное число четвертого преобразователя 10, поступающее со счетчика 3; К - числовая емкость суммато- ра четвертого преобразоваf теля l-o; . --г- постоянное число. Как видно из формулы выходная час тота четвертого преобразователя 10 пропорциональна как выходному числу счетчика.3, так и выходному коду дат чика 12. В случае необходимости вмеш тельства машиниста в программу движения он выводит плавно рукоятку дат чика 12 из крайнего положения в требуемое, в результате чего уменьшается число NV,, а следовательно, и число На выходе преобразователя частота код 13, т. е, число на выходе устрой ства, так как преобразователь часто та-код 13 имеет линейную характеристику .Ny, где Кд - коэффициент передачи преобразователя 13. Таким образом, введенные в схему два преобразователя код-частота, датчик угол поворота-код и преобразователь частота-код обеспечивают плавное вмешательство оператора в процесс формирования выходного кода. Формула изобретения Устройство для программного управления по авт, св. № 813374, отличающееся тем, что с целью расширения функциональных возможностей устройства, в него введены третий и четвертый преобразователи код- . частота, преобразователь частотакод и датчик угол поворота-код, сое- Диненный выходом с первым входом третьего преобразователя код-частота,подключенного вторым входом к выходу формирователя импульсов, а выходом к первому входу четвертого преобразователя код-частота, связанного вторым входом с выходом реверсивного счетчика,, а выходом - со входом преобразователя частота-код. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 813374, кл. G 05 В 19/407, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU813374A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Система управления шахтной подъемной машиной | 1977 |
|
SU734116A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |