(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КУРСА ДВИЖЕНИЯ ПОДЗЕМНОГО ОБЪЕКТА
I
Изобретение относится к области дистанционного измерения курса движения подземных объектов, например пнев.мопробойников, и может найти применение для измерения азимутальных углов буровых скважин и определения в них границ аномальных зон.
По основному авт. св. JVs 446637 известно устройство для измерения курса движения подземного объекта, содержаш,ее фазовые усилители, преобразователь, регистратор и магнитный датчик, выполненный в виде индукционного треугольника, подключенного через фазовые усилители к двум параллельным сельсин-приемника.м, роторы которых развернуты один относительно другого на 90° и закреплены жестко на оси, подключенной через редуктор к исполнительному двигателю, связанному с роторной обмоткой одного из сельсинов, при этом роторная обмотка второго сельсина подключена к индикатору 1.
Недостатком данного устройства является то, что оно не дает непосредственную информацию о местоположении объекта по азимуту на участке действия случайного магнитного поля (так как показания стрелочного индикатора на этом участке не верны) и о
повороте, произошедшем внутри участка, оператор узнает в виде общего (суммарного) отклонения только по выходе из него.
Отсутствие непосредственной информации о повороте на участке случайного магнитного поля ведет к ошибкам параллельного скоса. Вероятность увеличения этих ошибок возрастает с увеличением протяженности участка действия случайного магнитного поля.
Цель изобретения - повысить точность в определении местоположения подземного объекта по азимуту при наличии случайных магнитных полей на трассе движения.
Для этого в устройство для измерения курса движения подзе.много объекта введен пятипроводный кольцевой потенциометр, два токоотвода которого с разносом на 180° запитаны напряжением постоянного тока, а остальные три токоотвода с разносом в 120° соединены с сигнальными обмотками индукционного треугольника, причем ось кольце2Q вого потенциометра жестко связана со стрелочным индикатором.
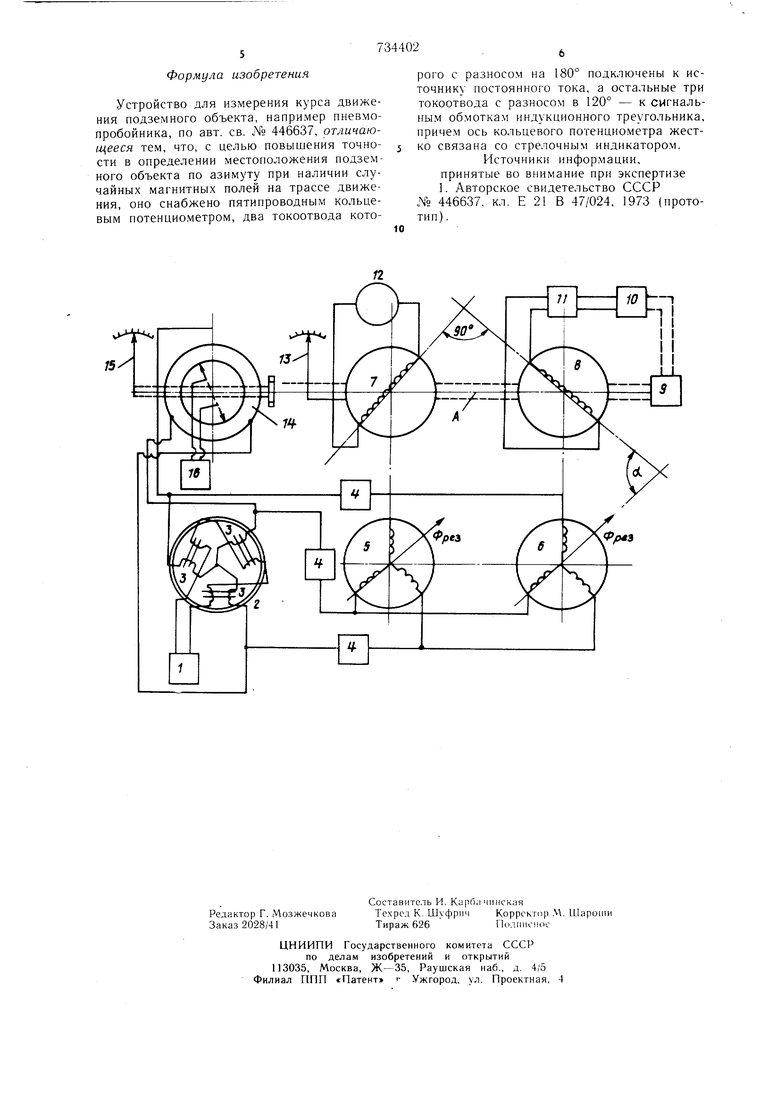
Введение дополнительного пятипроводного кольцевого потенциометра со стрелочным индикатором и источником постоянного тока, дает возможность оператору непрерывно следить за изменением направления движения подземного объекта по курсу на протяжении всей трассы, этим самым исключается не контролируемые интервалы случайного магнитного поля, приводившие к ошибкам параллельного сноса. На чертеже представлена электрическая блок-схема предложенного устройства. Устройство состоит из генератора 1 возбуждения, индукционного треугольника 2, который сигнальными обмотками 3 через фазовые усилители 4 подключен к двум параллельно включенным статорным обмоткам 5 и 6 сельсин-приемников. Роторы 7 и 8 сельсин-приемников развернуты один относительно другого на 90° и жестко закреплены на оси А, подсоединенной посредством редуктора 9 к исполнительному двигателю 10. Ротор 8 подключен к входу усилителя 11. Ротор 7 подключен к милливольтметру 12 (индикатору). На оси А закреплен стрелочный индикатор 13 следяш.ей системы- Пятипроводный кольцевой потенциометр 14 со стрелочным индикатором 15 запитан двумя токоотводами с разносом в на 180° напряжением от источника 16 .постоянного тока. Остальные три токоотвода кольцевого потенциометра 14 с разносом в 120° соединены с сигнальными обмотками индукционного треугольника 2. Работает устройство следующим образом. На прямолинейном участке трассы, на котором отсутствуют случайные магнитные поля, напряжение сигнальных обмоток индукционного треугольника 2 по экранированному кабелю через фазовые усилители 4 поступает на параллельно включенные статоры двух сельсин-приемников 5 и 6. Результируюш,ие магнитные потоки Фрез 5 и Фре. 6 имеют одно направление, определяемое распределением токов в сигнальных обмотках 3 индукционного треугольника 2 и совпадающее с направлением вектора горизонтальной составляющей магнитного поля Земли. Эти результирующие потоки индуктируют соответствующие напряжения в обмотках 7 роторов и 8. Напряжение с обмотки ротора 8 подается на вход усилителя 11 следящей системы, исполнительный двигатель 10 которой через редуктор 9 поворачивает ротор 8 .в согласованное положение, соответствующее углу о 90° относительно результирующего поля статора. Так как роторы закреплены на одной оси со сдвигом на 90°, то стрелочный индикатор 13 следящей системы характеризует направление вектора горизонтальной составляющей магнитного поля Земли, а напряжение на милливольтметре 12, снимаемое с обмотки ротора 7, соответствует модулю этого вектора (Нт). В «точке согласования изменение напряжения на кольцевом потенциометре приводит к изменению напряжения на милливольтметре 12 при неизменном положении стрелочного индикатора 13 следящей системы, т. е. в этой точке направление результирующего поля кольцевого Потенци ометра совпадает с результирующим внешним полем, В рассматриваемом случае на прямолинейном участке трассы без магнитных включений показания стрелочных индикаторов 13 следящей системы и 15 кольцевого потенциометра 14 в точке согласования должны быть одинаковыми, равными начальному согласованию. Азимутальный поворот объекта на трассе без включений характеризуется поворотом стрелочного индикатора 13 следующей системы при неизменном напряжении на милливольтметре 12. Если же на прямолинейном участке трассы действует случайное магнитное поле, искажающее вектор горизонтальной составляющей магнитного поля Земли (Нт), то в этом случае в распределении тока в сигнальных обмотках участвует вектор горизонтальной составляющейчрезультирующего магнитного поля, равный Нр РГ +1н где Нп - вектор горизонтальной составляющей магнитного поля помехи. В статорных обмотках 5 и 6 сельсин-приемников результирующие магнитные потоки в одинаковой степени изменяются как по величине, так и по направлению. Стрелочный индикатор 13 следующей системы отрабатывает угол на направление Т, а напряжение на роторной обмотке 7 соответствует модулю этого вектща (Но), отличного от первоначального (Н.Г ) Поворотом оси кольцевого потенциометра 14, на которой закреплены два токоотвода с разносом на 180° находят«точку согласования. В этой точке показание стрелочного индикатора 13следящей системы должно строго соответствовать показанию стрелочного индикатора 15 кольцевого потенциометра 14. В случае, когда в интервале случайного магнитного поля происходит поворот объекта показания стрелочных индикаторов 13 и 15 в «точке согласования будут не одинаковыми. Разница в показаниях есть не что иное как угол поворота объекта в зоне действия поля. Таким образом, зная в любой точке трассы изменения направления движения подземного объекта по курсу, исключают возникающие от случайных магнитных полей не контролируемые интервалы, ведущи к ошибкам параллельного сноса, те.м самым повышается точность в определении местоположения объекта по азимуту.
Формула изобретения
Устройство для измерения курса движения подземного объекта, например пневмопробойника, по авт. св. № 446637, отличающееся тем, что, с целью повышения точности в определении местоположения подземного объекта по азимуту при наличии случайных магнитных полей на трассе движения, оно снабжено пятипроводным кольцевым потенциометром, два токоотвода которого с разносом на 180° подключены к источнику постоянного тока, а остальные три токоотвода с разносом в 120° - к сигнальны.м обмоткам индукционного треугольника, причем ось кольцевого потенциометра жестко связана со стрелочным индикатором.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 446637. кл. Е 21 В 47/024, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения курса подземного объекта | 1973 |
|
SU446637A1 |
| СПОСОБ ПРОВЕРКИ ИСПРАВНОСТИj | 1965 |
|
SU168470A1 |
| Устройство для контроля точности индукционных датчиков магнитного курса | 1983 |
|
SU1210059A1 |
| Феррозондовый компас | 1983 |
|
SU1081417A1 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2104489C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Стабилизатор курса речных судов | 1972 |
|
SU449853A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
