темы, с приводным двигателем и входом регистратора. При наличии погрешностей в проверяемом индукционном датчике результирующий.вектор 3 статоре 2 отклоняется от началь- ног о положения на равные им углы. Эти отклонения вызовут напряжения, амплитуда и фаза которых пропорцио Изобретение относится к устройствам для проверки погрешностей двух- и трехфазных индукционн1;К датчиков магнитного курса.
Цель изобретения - автоматиза- дия процесса измерений в диапазоне от О до 360 , а также контроль точности двух- и трехфазных датчиков магнитного курса.
На фиг, и 2 изображены варианты блок-схем предлагаемого устройства.
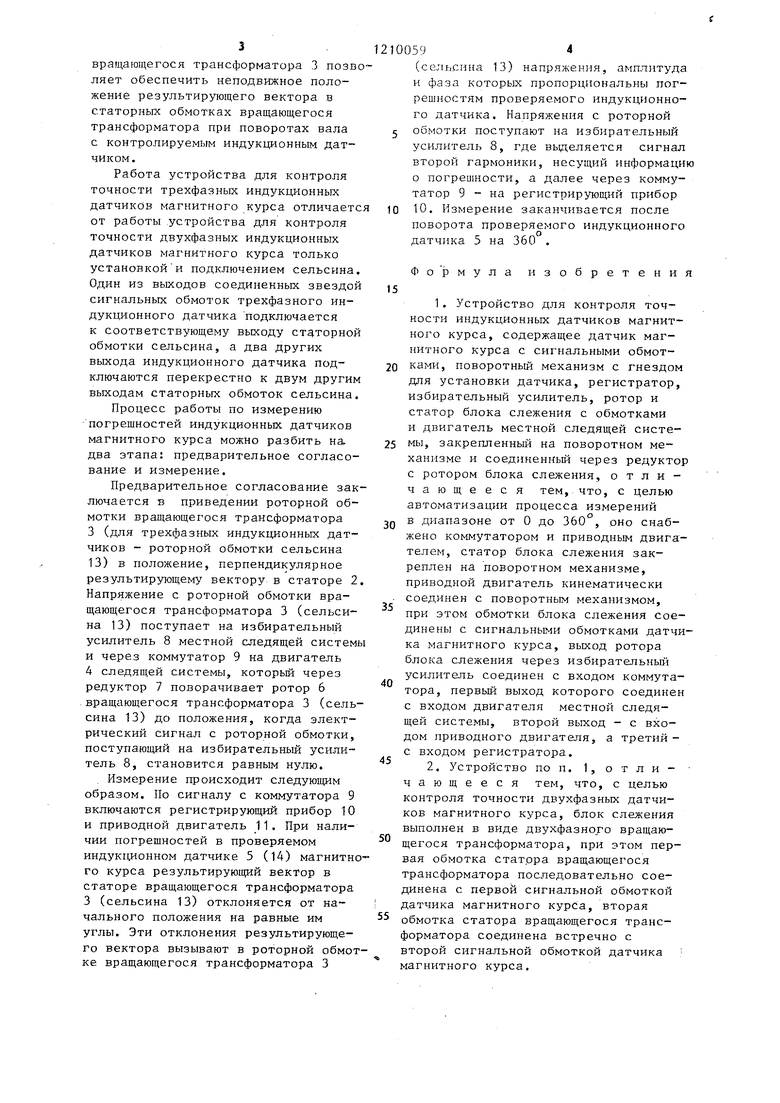
Устройство для контроля точности двухфазных индукционных датчиков магнитного курса содержит (фиг., 1) поворотный механизм 1, на вертикально расположенном валу которого закреплены статор 2 вращающегося трансформатора 3 и двигатель 4 местной следящей системы. На валу поворотного механизма имеется гнездо для установки произвольно ориентированно I O в азимуте контролируемого индукционного датчика 5 магнитного курса. Ротор 6 враш;ающегося транс- 4юрматора 3 механически соединен через редуктор 7 с двигателем 4 местной следящей системы и электрически соединен с входом избирательного усилителя 8, через коммутатор 9 соединенного с регистратором 10 и двигателем 4 местной следящей системы. Приводной двигатель 1I механически связан с валом поворотного механизма 1 и электрически с коммутатором 9. Статор 2 вращающегося трансформатора 3 имеет выходы ДЕ1ух обмоток, одна из. которых при установке контро.пируемого индукционного датчика 5 магнитного курса подклю- {ается последовательно к выходам одной сигнальной обмотки двухфазно1210059
нальны погрешностям прозеряемог О пп- дукционного датчика. Напряжения поступают.на избирательный усилитель 8, где выделяется сигнал второй гармоники, несутдай информациЕо о погрешностир а далее через коммутатор 9 -. на регистрирующий прибор 10. 2 з,п. ф-лы, 2 ил.
го индукционного датчика 5, а другая - встречно к выходам другой сигнальной обмотки индукционного датчика 5. Обмотки возбуждения проверяе- мого индукционног о датчика 5 подключены к генератору возбуждения (не показаны),
Устройство для контроля точности трехфазных индукционных датчиков
магнитного курса в основном аналогично устройству для контроля точности двухфазных индукционных датчиков за исключением того, что (фиг, 2) на валу поворотного механизма 1 закреплен статор 12 сельсина 13, контролируемый датчик 14 является трехфазньсм и один из выходов соединенных звездой сигнальных обмоток трехфазного индукционного
датчика соединен с соответствующим выходом статорных обмоток сельсина а два других выхода индукционного датчика соединены перекрестно с двумя другими выходами статорных
обмоток сельсина.
Устройство для контроля точности двухфазных индукционньк датчиков магнитного курса работает следуюш 1м образом,
Проверяемый индукционный датчик 5 магнитного курса, произвольно ориентированный в азимуте, устанавливается на валу поворотного механизма 1 ., и одна его сигнальная обмотка последовательно подключается к одной статорной обмотке вращающегося трансформатора 3, а другая - встречно к другой статорной обмотке вращающегося трансформатора 3. После- довательное и встречное соединение сигнгшьных обмоток индукционного датчика 5 со статорными обмотками
вращающегося трансформатора 3 позволяет обеспечить неподвижное положение результирующего вектора в статорных обмотках вращающегося трансформатора при поворотах вала с контролируемым индукционным датчиком.
Работа устройства для контроля точности трехфазных индукционных датчиков магнитного курса отличаетс от работы .устройства для контроля точности двухфазных индукционных датчиков магнитного курса только установкой и подключением сельсина. Один из выходов соединенных звездой сигнальных обмоток трехфазного индукционного датчика подключается к соответствующему выходу статорной обмотки сельсина, а два других выхода индукционного датчика подключаются перекрестно к двум другим выходам статорных обмоток сельсина.
Процесс работы по измерению погрешностей индукционных датчиков магнитного курса можно разбить на два этапа; предварительное согласование и измерение.
Предварительное согласование заключается в приведении роторной обмотки вращающегося трансформатора
3(для трехфазных индукционных датчиков - роторной обмотки сельсина 13) в положение, перпендикулярное результирующему вектору в статоре 2 Напряжение с роторной обмотки вращающегося трансформатора 3 (сельсина 13) поступает на избирательный усилитель 8 местной следящей системы и через коммутатор 9 на двигатель
4следящей системы, который через редуктор 7 поворачивает ротор 6
.вращающегося трансформатора 3 (сельсина 13) до положения, когда электрический сигнал с роторной обмотки, поступающий на избирательньш усилитель 8, становится равным нулю.
Измерение происходит следующим образом. По сигналу с коммутатора 9 включаются регистрирующий прибор 10 и приводной двигатель 11. При наличии погрешностей в проверяемом индукционном датчике 5 (14) магнитного курса результирующий вектор в статоре вращающегося трансформатора 3 (сельсина 13) отклоняется от начального положения на равные им углы. Эти отклонения результирующего вектора вызывают в роторной обмотке вращающегося трансформатора 3
210059
(сельсина 13) напряжения, амплитуда и фаза которых пропорциональны погрешностям проверяемого индукционного датчика. Напряжения с роторной 5 обмотки поступают на избирательный усилитель 8, где выделяется сигнал второй гармоники, несущий информацию о погрешности, а далее через коммутатор 9 - на регистрирующий прибор 10. Измерение заканчивается после
10
поворота проверяемого индукционного датчика 5 на 360 .
Фо 13 мула изобретения
1. Устройство для контроля точности индукционных датчиков магнитного курса, содержащее датчик магнитного курса с сигнальными обмотками, поворотный механизм с гнездом для установки датчика, регистратор, избирательный усилитель, ротор и статор блока слежения с обмотками и двигатель местной следящей системы, закрепленный на поворотном механизме и соединенный через редуктор с ротором блока слежения, отличающееся тем, что, с целью автоматизации процесса измерений в диапазоне от О до 360 , оно снабжено коммутатором и приводным двигателем, статор блока слежения закреплен на поворотном механизме, приводной двигатель кинематически соединен с поворотным механизмом, при этом обмотки блока слежения соединены с сигнальными обмотками датчика магнитного курса, выход ротора блока слежения через избирательный усилитель соединен с входом коммутатора, первый выход которого соединен с входом двигателя местной следящей системы, второй выход - с входом приводного двигателя, а третий - с входом регистратора.
2. Устройство по п. 1, о т л и - чающееся тем, что, с целью контроля точности двухфазных датчиков магнитного курса, блок слежения выполнен в виде двухфазного вращающегося трансформатора, при этом первая обмотка статрра вращающегося трансформатора последовательно соединена с первой сигнальной обмоткой датчика магнитного курс;а, вторая обмотка статора вращающегося трансформатора соединена встречно с второй сигнальной обмоткой датчика магнитного курса.
S121
3. Устройство по n, 1, о т л н - ч ающееся тем, что, с целью контроля точности трехфазных датчиков магнитного курса, блок слежения выполнен в виде трехфазного вращающегося трансформатора, при этом вы- хоД первой сигнальной обмотки датчи00596
ка магнитного курса соединен с первым входом статорных обмоток трансформатора , второй и третий выходы сигнальных обмоток датчика магнит5 ного курса перекрестно соединены с . вторым и третьим входами статорных обмоток трансформатора.
Фиг. 2
Составитель В.Лыков Редактор О.Юрковецкая Техред А.Бабинец Корректор Е.Сирохман
509/51
Тираж 671 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 1130:) :), Москва, , Раушская наб., д. А/5
Филиал Ililil Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для измерения курса движения подземного объекта | 1977 |
|
SU734402A2 |
| Устройство для регистрации траектории движения наземного транспортного средства | 1973 |
|
SU478186A1 |
| Феррозондовый компас | 1983 |
|
SU1081417A1 |
| Устройство для измерения курса подземного объекта | 1973 |
|
SU446637A1 |
| ДВУХКАНАЛЬНАЯ ДИСТАНЦИОННАЯ ПЕРЕДАЧА | 1956 |
|
SU112238A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
Изобретение относится к устройствам для проверки погрешностей двух- и трехфазных индукционных датчиков магнитного курса и позволяет автоматизировать процесс измерений в диапазоне от О до 360 . Для этого статор блока слежения (БС) закреплен на noBLipoTHOM механизме и обмотки БС соединены с сигнальными обмотками датчика магнитного курса, а чзыход ротора БС через избирательный усилитель соединен с входом коммутатора, вход которого соединен соответственно с двигателем следящей сиеё
| Устройство для измерения погрешностей иНдуКциОННыХ КОМпАСОВ | 1979 |
|
SU823863A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля точности индукционных датчиков | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
