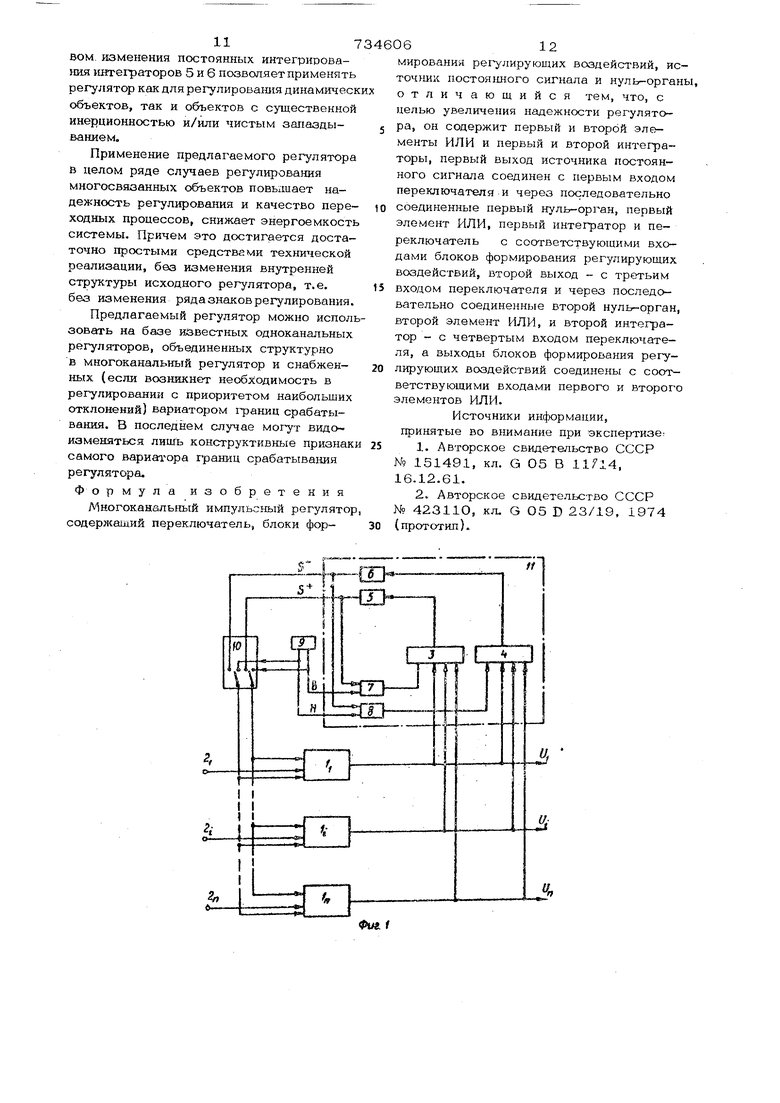
Изобретение относится к технической кибернетике, а именно к автоматическим многоканальным регуляторам общепромыш ленного и специального применения, и мо жет быть использовано при построении многоканальных автоматических систем, при реализации которых целесообразно ис пользовать принцип приоритета по наибол шим отклонениям. Применение данного регулятора является наиболее целесообразным при регулировании несвязанных между собой объектов (например, регулирование температур в отдельных печах и т.п.) и, что наи более важно, при автоматизации объектов многосвязанного регулирования, таких как доменная печь, ядерный и химический реакторы, нефтяные пласты и т.п. Регулирование распределений параметров в указанных объектах может осуществлятся либо с помощью комплекса о,гшоканальных регуляторов, либо посредством многоканальных регуляторов, рассматриваемых в последнее время как относительно самоетоятельные по назначению н по реалйЗации. Известен коюгокапальный регулятор параллельного действия с оячовременным обслуживанием регулируемых объектоВг который содержит исполнительные механизмы, индивидуальные схемы сравнения, входы KOTopbLx Подключены к общек у генератору развертьшающего напряжения и к соответствующим датчикам сигнала рассогласования, а выходы соединены с релейными элементами регулировакргя П|. Наиболее близким техническим решением является регулятор, содержащий переключатель, блоки форм{фования регулирующих воздействий, источник постоянного сигнала и 1гуль орган, который предназначен для регулирования объектов или распределения параметров в объектах в соответствии с законом, реализуемым каждым отдельным каналом регулирова1гия Исполнительные органы в каждом ка1мле приходят в действие каждый раз, как 7 только в канале возникает отклонение, превышающее зону нечувств-ттельности канала регулирования. В ряде случаев данный режим непрерывной (без приоритета) компенсации возникающих отклонений величин от заданных уставок оправдан и единственно приемлем. Однако в целом ряде случаев (особенно при регулировании ряда устойчивьЕх объектов - объектов с самовьфавняванием либо распределений параметрой в них) применегше указанных регуляторов исюправданно повышает энергоемкость системы, ухудкает показатели качества регулировашм в случае взаимосвязанных регулируемых величин и, что самое главное, снижает падсж5юсть системы в целом. Последнее объяснясггся тем, что при возникновении отклонений в каналах регулирования, пусть даже от кесобствеппых для каждого канала возмущений, в действие вступает большое число нспол)п-1теллзных органов, несмотря на то, что действие определепного числа {если не большинства) из них неоправдан но из условий компенсации возшькшего отклонен.кя (отклонений) регулируемой величины. На практике данные ситуации пытаютс исключить с помощью cHCTOvi,, синтезироваш1ых ка основе принципа инвариантности, в -шстности с помощью тал каоыBaeMbix систем автономногхэ регулиров:.;,ния, но это значительно усложкяот реали зацию систем регулироваюш и ум -:иьл1аот их надежность, что является их недостатком. Цель изобретения - повышение надежности в многуэканальной системе регулиройаш1Я при компенсации возникающих отклонений регулируемогопараметра, т.е. увеличение надежности регулятора. Эта цель достигается тем, что в многоканальный регулятор введен вариатор грашщ срабатывания, содержащий первый и второй элементы ИЛИ и первый и второй интеграторы, первый выход источник постоянного сигнала соединен с первым входом переключателя и через последовательно соединенные первый нуль-орган первый элемент ИЛИ, первый интегратор и переключатель - с соответствую1дими входами блоков формирования регулирующих воадействий, а второй выход - с тре тьим входом переключателя и через последовательно соединенные второй нульорган, второй элемент ИЛИ и второй интегратор - с четвертым входом .пере- слючателя а вглходы блоков формировани 64 рег лирующих воздействий соединены с соответствующими входами первого и | BTOpoio элементов ИЛИ. Введение автомат1Г-1еского управляемого вариатора границ срабатывагшя в многоканальный ре1 лятор позволяегг переводить его в режим работы, когда управляющие воздействия будут возникать лишь в тех каналах регулирования с положительными и отрицательными отклонепиями, отклонения в которых по модулю соответственно наибольшие в данный момент времени {ос тцествляется приоритетный принцип рег лирования). Другими словами, среди кана.лов, в которых в данный MOMeiiT действуют поло- 1сительпые отклонения регулируемых величин, будет формироваться регу.чирующее всхздействие ntiusb в канале с наибольитим положительным отклоне ием, а среди каналов с отрицатель 1ыми отклонепиями - лишь в канале с наибольшим отрицательным отклонением. Если одновременно окажутся равными и наибольшими несколько отклонений как среди положительного, так и отрицательного рядов отклонений (рассогласований), то равное их числу количество блоков формирования регулирующих воздействий будет формировать соответствующие знакам отклонений регулирующие воздействия. Причем, приоритет ио наибольшим отклоце}щям будет oc тдecтвлятьcн непрерывно во врс-мепи (а не дискретно) ло море устрашения отклонений, т.е. пока отклонения ле войдут в нечувствительности регулятора. Осуществление данного режима работы многоканального рег;улятора не требует пркменен1-ш сиециальШ)1х сло;кных устройств анализа величин отклонений на 11а1;большее значошо, ях 5Наковой селекiu;;-i и селекции на местоположе -ше. Ма фиг. 1 изображена схема регулятора; ка фиг. 2 - график временной диаграммы варианта лзменення величин регулируемого параметра и основных сигналов с выходов соответствующих блоков регулятора. Многокана. ьный импульсный регулятор содержит блоки 1(, 1 ,...,, 1 формироваНИЛ регулирующих воздействий, датчики 2-,, 2;j,,.,2f; по числу каналов регулирования, первый лошческий элемент ИЛИ 3 поло кител1 ных и второй элемент ИЛИ 4 OTpHHaTe/ibHbLx регулирующих воздействий. Регулятор содержит также первый 5 и вторрй 6 интеграторы, первый 7 и второй 8 нуль-органы, вторые входы которых под л1оче {1, к истонш-ку ЗсХда}шя требуемых границ срабатывания, источник 9 п тоянного сигнала, переключатель 10, ко торый предназначен для подключения выходов варианта 11, к соответствующим входам блоков формирования регули рующих, воздействий. Переключатель Ю необходим для перевода многоканального регулятора в режим работы, соответству щий выработке управляющих воздействий по приоритету наибольисих отклонений. Нуль органы 7, 8 предназначены для фиксации момента равенства сигналов с выходов интеграторов 5, 6 соответствую щим сигналам с выхода источника задан требуемых границ срабатыва1шя 9. Два управляемых интегратора 5, 6 в устройстве предназначены для выработ ки сигналов .варьируемых верхних и нижних Г1)аниц срабатывания в зависимости от текущих значений соответственно наибольшего положительного и наименьшего отрицательного отклонений. На графике временных диаграмм показаны В и Н - си1налы заданных уровней, определяющие верхнюю и нижнюю фиксированные rpaiumbi срабатывания в каналах регулирования; сигна ль( с вь;ходов интеграторов, связанных соотв€ тственно с первым и вторым элементами ИЛИ;5. и S. - максимальное и минимальное значение сигналов с выходов интеграторов 5, 6; 1-Х - ха- рсжтерные точки на графике изменения . сигнала 5 и соответствующие им во вре мени точки на графике изменения положи тельных регулирующих воздействий; Х1-ХУ11 - харш ;тернь е то-ши на графике Изменения сигнала 5 и соответству щие им во времени точки на графике изменения отрицательных регулирующих воздействий; U, U Y сигналы управляющих воздействий по соответствуЕощему каналу регулироваьшя, которые могут иметь условно положительное и отрицательное значение, а также быть равными нулю. Приншш действия регулятора поясняет ся описанием его в статическом состояНИИ и в работе, т.е. описывается динами ка взаимодействия функциональных элементов схемы регулятора. В качестве исходного состояния регу- лятора принимается состояние в такой начальный момент времени 4.;,, О, когда амплитуды регулируемых сигналов датчиков 2| ...2 о и сигналов и соответствуют 066 значениям, приведенным на фиг. 2. Поскольку 5 (с выходов интеграторов 5 и б) представляют собой автоматически изменяемые сигналы варьируемых верхней и нижней границ срабатывания, амплитудные значе1шя которых в начальный момент соответственно заведомо больше, а в другой заведомо меньше амплитуд регулируемых сигналов дат9 о чкков то сигнапы с выходов блоков формирования регул)фующих воздействий отсутствуют. Это соответствует тому, что отклонения регулируемых величин датчиков 2 ...2у находятся в заБедокю большой (установленной В начале) зоне нечувствительности, определяемой в начальный момент времени гран1щами5 л, ... О. В данный момент времени также отсутствуют сигналы с выхода первого элемента ИЛ1 3 и выхода второго элемента ИЛП 4, а также с вьгходов первого 7 и второго 8 нуль-органов. Переключатель 10 находится в положении, пропускающем сигналы на соответствующие входы задания верхней и 1шжией храниц срабатывания блоков формирования регулы ipy ющих возд ействий. Регулятор работает следующим образом. При отсутствии сигналов U..., Uy с выходов блока формировакил управляющих воздействий и с;1гналоэ с выходов первого 7 и второго 8 нуль-органов сигналы с BbixonoB первого 3 и второго 4 элементов ;ЛИ отсутствуют. При отсутствии сигнала с выхода первого элемента ПЛИ 3 сигнат S с выхода интегратора S начинает изменятг с ; с постоянной скоростью ,к нулю, т.о. уменыяаться. Сигнал 3 с выхода интегратора 6 при OTcyix Bi.-; сигнала с в.лхода второго элемента liJiii 4 будет иоме, няться с ПОСТО51ННОЙ скоростью от нуля в сторону увеличе1гия, т.о, увеличиваться по амплитуде. Уменьшение сигнала (фиг 2) с выхода интегратора 5 будет происходить до тех пор, пока не наступит юмент равенства верх1шй варьируемой градчииы срабатывания в одном из каналов регул1фс вания со значением сиг11ала датч1ша, например 21 (фиг 2, точка И). В этот момент с выхода блока формирования управляющих всхзцейсггвий i -го канала регулирования всошкЛЭт условно положительный управляющий сигнал (воздзнстч-;;и 5 на который срабатывает первый элемент ИЛИ 3, и на его выходе 1юяв.г Я-;ггся сигнал. Этот сигнал, поданный на вход интегратора 5, изменяет направление j-iaменёния сигнала S на обратное, т.е. вызывает его увел1ие1ше. Но в свою очеред увеличение сигнала Забудет продолжаться до тех. пор, пока уровень верхлей варьируемой границы срабатывания не пре.гзысит значение сигнааа датчика 2з.Б этот момент сигнал U с выхода i -го канала реолировашш станет равным нулю, сигна с выхода первого элемен-.а ИЛИ 3 также станет равным нулю, что приводит к изменению на первоначальное направление сигнала выхода И1гтегратора 5. В дальнейшем работа рассмотренного контура происходит описанным выше образом,т.е. устанавливается автоколебателыгый режо-гм изменения сигнала Sотносительно наибольшего в данный момет- слчслонешш син.ала датчика 2Л.
Следует особо отметить, что первый элемент ИЛИ 3 выдает сигнал на своем выходе всякий раз, как только сигнал S с BbixoAdi интегратора 5 оказывается меньше наибольшего значеге-ш из сигна.-лов датчиков 2,.o2v,, Это соответствует тому, что каждьШ зна онйс наибояьше1чэ откло)1ени5 аы-омйгмчески выбирается в качестве верхней тэктеи й срабатывания для всех кляя-ггов регулирования. Поскольку полол-о-п Плгкле отклонения в других каналах кюньшй пакбольшего отклонения (в paccMOTpemioivi случае отклонения в I-OM канале), то и управляющие воздействия в Ш1х (т-е, в других каналах с положмтель. г/гклоненияьли) равны нулю.
Таким образом на рассмотрегшом уч:ас тке I-II с выхода -i ix канала регулировалия с наибольшим отклонением будет положительное управляюа(ее лоздействйе длительностью д-i j .
В cooTBei cTBHH с вышейзложенпым и как следует из фиг. 2 на участке 11-11 с выхода -го канала будет иметь место последователыюсть условно поло- 1сительных управляющих сигналов U , длительность ut. каждогчэ из которых
будет определяться постоянной времени интв1рирования интегратора 5 (скоростью нарастания S ) и скоростью изме}гения сигналадатч:.ика 2-i . При более детальном рассмотрении следует учитывать также влияю1е на нее инерциошо.о. свойств блока формировавши управля ои1их воздействий.
Интервал времени между -правляюшими сигналами Uj будет зависеть от- скорости спада S. Иоэтому, задавая необходимы параметры скорости спада и нарастания сигнла 5(путем изменения постоянной времени итегратора 5, можло получать требуемые па)эаметры управляющих сигналов () , т.е величин их дпительности и паузы между ними.
При необходимости данная последователы асть может просто преобразована в управляющий сигнал постоянногх) уровня, если, HaiijjHMOp на выходе канала нсхзтавить расширитель сигналов.
F3 точке III сигна датчика 2т равен сигналу датчика 2 , поэтому в данный момент будут иметь место управляющие воздействия с этих двух каналов. Но поскольку на участке 111-1У отклонение сигнала датчика 2 (относительно уровня В) больше-э чем у сигнала датчика 2i , то управляющие сигналы будут иметь место с выхода первого канала регулироваHiisi, в то время как на выходе i -го ка}1ала они на данном участке будут pcBKbi нулю. Динамика появл. и исчезновения управляющих сигналов с выхода первого кал.зла полностью анало- псчна ранее рассмс-1ренной для 1-го канала. Отли-1ие лишь в том, что первый элемент ИЛИ 3 будет теперь выдаватт сигнал на вход интеграт-ора 5 на каждый условно положктелыолЩ сигнал с выхода первого канала регулирования.
Работа регулятора будет происходить описанным выше образом вплоть до момента време1Ш,который оа-мечеи на фиг, 2 точкой Y, 8 данный момент времени отклонения становятся меньше задагаюй фиксщэоваьной верх:чей границы срабатывания В к моныие тс-лсущего значения сигнала , что также соответствует O-I иутствию сигналов угфавления с выходов блоков 1 каналов (где были положительные или нулевые сгтклоиегшя.) и, как следствие, с выхода первого элемента ИЛИ 3. 1-}0 при отсутствии сигнала на аходе интегратора 5 сигнал с его выхода начинает снова уменьшаться до того момент.а, пока не стане - равным {с учетом инерцио}1нос-ти даже несколько меньшей) }фовню заданного сигнала фиксированной верхней границы срабатывашш В. В момент равенства выхода интегратора 5 сигналу В срабатывает первый нуль-орган 7, сигнал с выхода котороххз действует на входе первого элемента ИЛИ 3, вызывает
появление сипш-ча с ьыхода ого, заставляя тем самым увел}гчиват1юя сигнал S , что в свою очередь приводит к исчезновению сигнала с нуль-i органа 7. Поэтому на y acткe 1У-У все происходи аналогичным образом, только сигна.ч изменяется относительно заданного уровня В (который остается постоянным), а первый Э71емент ИЛИ 3 управляется сигналами, поступающими с выхода первого нуль-органа 7.
В данном случае первый нуль-орган 7 выполняет функцию одного из блоков 1-И каналов регулирования с наибольшим отклонением (поскольку на данном участке все положительные отклонения меньше уровня В), к которому подключе не датчик регулируемого объекта сигнал а источник заданного сигнала.
Если одно из положительных отклонеНИИ вновь выйдет за предель верхней заданной границы срабатывания В, как например показано на участке У 1-УIIУ111-1Х, то сигнал S будет изменяться до момента равенства с наибольшим отклонением (так как вплоть до этого момента будет действовать хотя бы один из условно положительных сигналов управления, а стало быть и сигнал с выхода первого элемента ИЛИ 3. В даль нейшем же сигнал S , как ранее подробно было рассмотрено, начнет изменяться относительно текущего уровня сигнала наибольщего отклонения, как например показано на участках У11-У111, а так же У111-1Х.
Из рассмотренного следует, что при всех возможных комбинациях положительных отклонений сигналов датчиков сигнал с выхода интегратора будет
изменяться (колебаться ) относительно уровня сигнала наибольшего отклонения, если он превышает заданный уровень верхней границы срабатывания В. Если все положительные отклонения меньше
уровня В, то сигнал 5 изменяется относительно Этого уровня. В соответствии с этим положительное упра вляющее воздействие будет лишь в том канале регулирования из общего числа канатов с положительными отклонениями, отклонение в котором наибольшее и оно превышает установленную верхнюю границу срабатывания.
Динамика работы контура регулятора по наибольшим отрицательным отклонениям, уровень которых ниже заданного уровня нижней границьЕ срабатывания Н,
полностью аналогична ранее рассмотренной для положительных отклонений. Этот контур помимо общих элементов 1- ц для обоих контуров образуется также втрым элементом ИЛИ 4 условно отрицательных сигналов и интегратором 6. Отличие состоит лишь в том, что сигнал 5 с выхода интегратора 6 увеличивается по амплитуде при отсутствии сигнала с выхода второго элемента ИЛИ 4, а уменьшается - когда он действует на его выходе.
Работа рассмотренных контуров являеся независимой, апоэтому возможна независимая настройка параметров положительных и отрицательных управляющих воздействий, которые действуют на выходах каналов регулирования соответственно с наибольшим положительным и наибольшим отр}П1ательным отклонением.
В заключение рассмотрения работы предлагаемого многоканальнох х) регулятора следует отметить, что если переключатель 10 перевести в другое (второе) положе1П1е, т.е. подключить входы блоков к источнику 9 сигналов, то мы переведем регулятор в обычный режим, т.е. в реячнм регулирования приоритета наибольших отклонений.
В этом смысле введение в многоканальный регулятор автомат1гческк управляемого вариатора границ срабатывания не изменяет его внутренней структхфы, но существенно расш1фяет функциональные возможности ц повышает надежность системы регулирования.
Следует подчеркнуть возмомсность применения предлагаемого регулятора в качестве устройства обнаружения, индикации и регистрации сигналов с наибольшими положительным и отрицательными отклонениями. Данная возможность прямо следует из принципа работы регулятора, так как местоположение канала с наибольшим отклонением определяется наличием управляющего воздействия с выходов блоков l-Vt соответствующих каналов, а вел1гчины сигналов 5 (фиг. 2), изменяются относительно уровней сигналов с наибольшими отклонениями. Осуществив сглаживание пульсаций сигналов и S можно реп1стрировать сигналы с наибольшими положительнььми и отрицательными отклонениями посредством известных регистраторов.
Возможность независимого измене (шя параметров сигналов управл.чющих воздействш в широких пределах посродстBOM изменения постоянных интегрирования интехраторов 5 и б позволяет применять регулятор как для регулирования динамическ объектов, так и объектов с существенной инерционностью и/или чистым аапаадыванием.
Применение предлагаемого регулятора в целом ряде случаев регулирования многосвязанных объектов повьаиает надежность регулирования и качество переходных процессов, снижает энергоемкость системы. Причем это достигается достаточно простыми средстве ми технической реализации, без изменения внутренней структуры исходного регулятора, т.е.
без изменения ряда знаков регулирования.
Предлагаемый регулятор можно использовать на базе известных одноканальных регуляторов, объединенных структурно в многоканальный регулятор и снабженных (если возникнет необходимость в регулировании с приоритетом наибольших отклонений) вариатором границ срабатывания. В последнем случае могут видоизменяться лишь конструктивные признак самого вариа1ора границ срабатывания регулятора. Формула изобретения
Многоканальный импульсный регулятор содержащий переключатель, блоки формирования регулирующих воздействий, источ}Ш11 постоя1шого сигнала и нуль-орган отличающийся тем, что, с целью увеличения надежности регулятора, он содержит первый и второй элементы ИЛИ и первый и второй интеграторы, первый Выход источника постоянного сигнала соединен с первым входом переключателя и через последовательно соединенные первый нуль-орган, первый элемент ИЛИ, первый интегратор и переключатель с соответствующими входами блоков формирования регулирующих воздействий, второй выход - с третьим входом переключателя и через последовательно соединенные второй нуль-орган второй элемент ИЛИ, и второй интегратор - с четвертым входом переключателя, а выходы блоков формирования регулирующих воздействий соединены с соответствующими входами первого и второг элементов ИЛИ.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 151491, кл. G 05 В 11714, 16.12.61.
2.Авторское свидетельство СССР № 423110, кл. G О5 D 23/19, 1974 (прототип).
П
CHZJO
J
J
U
(fr,


| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный импульсный регулятор | 1978 |
|
SU767704A2 |
| Многоканальный импульсный регулятор | 1974 |
|
SU565283A1 |
| Способ автоматического регулирования перетоков мощности между двумя энергосистемами | 1988 |
|
SU1647760A1 |
| Устройство адаптивного управления процессом помола | 1981 |
|
SU1021470A1 |
| Система автоматического управления процессом получения сернистого газа в производстве серной кислоты | 1989 |
|
SU1641770A1 |
| Система автоматического регулирования температуры свежего пара | 1972 |
|
SU474659A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЭНЕРГОБЛОКА | 2003 |
|
RU2258146C1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |

