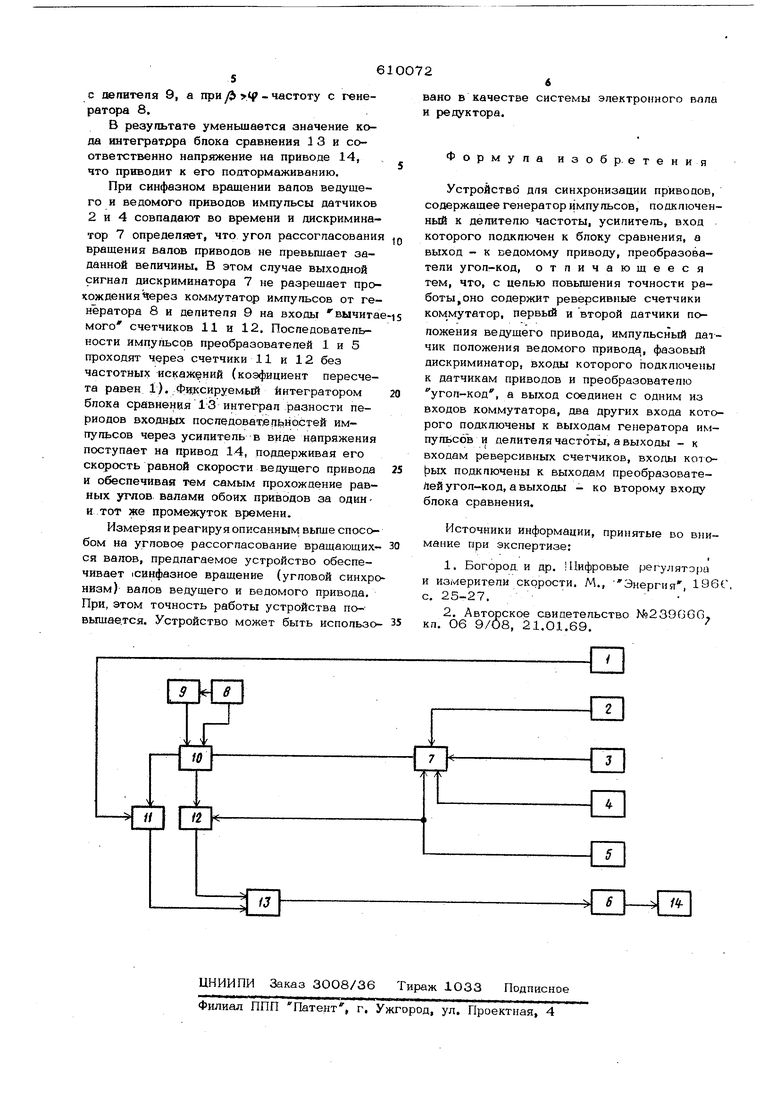
(54) УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПРИВОДОВ н соответственно приводимых ими в движение рабочих органов по следукяцим причинам: абсолютное значение вепичин углов (фаз) ведущего в ведомого двигателей, вошедших в такой синхронизм по угпу, не определены, т. е. синхронно с иупевой отметкой ведущего вала может вращаться произвольная отметка вала ведомого двигателя. При случайных, не предусмотрен1пых по величине возмущающих воздействиях на такую систему или сбоях аппаратуры возможно насыщение схем сравнения, в результатечего после возвращения на нормальный режим в синхронизм с нулевой отметкой ведущего вала входит уже другая произвол ная отметка, т. е. первоначальное относительное угловое положение валов изменяется, хотя это новое значение и сохраняется. Целью изобретения является повышение точности работы устройства. Поставленная иель достигается тем, что устройство содержит реверсивные счетчики, коммутатор, первьй и второй датчики положения ведущего привода, импульсный датчик положения ведомого привода, фазовый дискриминатор. Входы последнего подключе ны к датчикам приводов и к одному из преобразователей угол-код, а выход соединен с одним из входов коммутатора, два других входа которого подключены к выходам генератора импульсов и делителя частоты, а выходы ,- к входам реверсивных счетчиков. Входы этих счетчиков подключены- к выхода преобразователей угол-код, а выходы ко вто рому входу блока сравнения.. На чертеже представлена структурная схема устройства для синхронизации ведущего и ведомого приводов. Устройство содержит преобразователь 1 угол-код задающего устройства {ведущего привода). Первый 2 и второй 3 датчики положения ведущего привода, датчик положения 4 ведомого привода, преобразователь 5 угол-код ведомого привода, усилитель Мощности 6, фазовый дискриминатор 7, гене ратор импульсов 8, целитель частоты 9, коммутатор 10, реверсивные счетчики и 12, блок сравнения 13 и ведомый привод Устройство работает следующим образом Фазовый дискриминатор 7 определяет знак угла рассогласования ( /Э ) на основа нии сигналов, поступающих от датчиков 2-4 и величину рассогласования/3 0,, где Ц расчетная величина угла, определяемая из условия максимального быстродействия при вхождении в угловой синхронизм) на основании сигналов от датчиков 2-4 и преобразователя 5. Искусственное изменение (без изменения задающей частоты преобразователя 1) кода бнока сравнения 13 вводит в систему регулирования возмущение, выраженное в заведомо калиброванном значении угла,равном весу импульса преобразователей угол-код и поэтому отработка этого возмущения представляет изменение скорости ведомого при-, вода, интеграл которого равен ос , Если код блока сравнения искусственно увеличить на 1, то это увеличение,- пройдя Через усилитель мощности 6, повысит напряжение на входе привода 14 и соответственно его скорость. Поскольку частота преобразователя 1 не меняется, то система должна отработать это возмущение , вернув блок сравнения 13 и соответственно напряжение на двигателе в первоначальное состояние. Это может произойти только в результате того, что по вычитающему входу блока сравнения 13 от преобразователя 5 угол-код привода 14 пройдет за какое-то время на один импульс больше, чем от преобразователя, т. е. если вал привода 14 и соответственно его преобразователь 5 повернутся за это время на угол больщий, чем угол поворота вала ведущего, привода. Соответственно искусственное уменыцение кода блока сравнения 13 на 1 приводит к тому, что в результате отработки этого возмущения вал привода 14 повернется на угол об меньщий,чем угол поворота вала преобразователя 1. Реверсивное изменение кода блока сравнения 13 можно произвести за счет искусственного калиброванного изменения его входных величин: частот (периодов) импульсных последовательностей от преобразователей 1 и 5. При несинфазном вращении валов приводов дискриминатор 7 определяет знак рассогласования (отстает или опережает вал привода 14) и его вепйчину(/26Ч р 4р). В зависимости от знака угла рассогласования дискриминатор 7 вырабатывает сигнал, который заставляет коммутатор 10 подклк чаться по выходу либо к выходу вычитаемого счетчика 11, либо к выходу вычитае-. счетчика 12. В зависимости от величины углауЗ ф или/3 -ф дискриминатор 7 вырабатывает сигнал, коюрый заставляет коммутатор 1О подключать на эти входы счетчиков 11 и 12 частоту либо с делителя 9 (низкую), либо с генератора импульсов 8 (более высокую). Если вращающийся вал привода 14 опережает абсолютное значение угла опережения у21бф,,то коммутатор 10 по команде детектора 7 попключается к входу вычитаемогЬ счетчика 11 и подает на него частоту
с оепитепя 9, а при/5 гф-частоту с генератора 8.
В результате уменьшается значение кода интегратрра бпока сравнения 13 и соответственно напр51жение на приводе 14, что приводит к его подтормаживанию,
При синфазном вращении вапов ведущего и ведомого приводов импульсы датчиков 2 и 4 совпадают во времени и дискриминатор 7 определяет, что угол рассогласования вращения валов приводов не превьплает заданной величины. В этом случае выходной сигнал дискриминатора 7 не разрешает прохождения Через коммутатор импульсов от генератора 8 и делителя 9 на входы вычита мого счетчиков 11 и 12. Последовательности импульсов преобразователей 1 и 5 проходят через счетчики 11 и 12 без частотных искажений (коэфициент пересчета равен 1). Фиксируемьй интегратором блока сравнения 13 интеграл разности периодов входных последоватеарностей импульсов через усилитель в виде напряжения поступает на привод 14, поддерживая его скорость равной скорости ведущего привода и обеспечивая тем самым прохож пение равных утлов валами обоих приводов за один и тот же промежуток времени.
Измеряя и реагируя описанным вьпие способом на угловое рассогласование вращающихся валов, предлагаемое устройство обеспечивает (Синфазное вращение (угловой синхрнизм) валов ведущего и ведомого привода. При, этом точность работы устройства повьпиае.тся. Устройство может быть использо
вано в качестве системы электронного вала и редуктора.
Формула изобр. етения
Устройство для синхронизации приводов, содержащее генератор импульсов, подключенный к делителю частоты, усилитель, вход которого подключен к блоку сравнения, а выход - к ведомому приводу, преобразователи угол-код, отличающееся тем, что, с целью повьпиения точности работы, оно содержит реверсивные счетчики коммутатор, первый и второй датчики положения ведущего привода, импульсный датчик положения ведомого привода, фазовый дискриминатор, 1входы которого подключены к датчикам приводов и преобразователю угол-код, а выход соединен с одним из входов коммутатора, два других входа которого подключены к выходам генератора импульсов и делите ля частоты, а выходы - к входам реверсивных счетчиков, входы кто(эых подключены к выходам преобразователей угол-код, а выходы - ко второму входу блока сравнения.
Источники информации, принятые во внимание при экспертизе:
1.Богород. и др. Цифровые регулятора
и измерители скорости. М., Энергия, 196 с, 25-27.
2.Авторское свидетельство №230000 кл. 06 9/08, 21,01.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1980 |
|
SU903811A1 |
| Устройство для синхронизации приводов | 1982 |
|
SU1086409A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ ТОЧНОГО ВРЕМЕНИ | 1990 |
|
RU2033640C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство синхронизации сигналов | 1981 |
|
SU1021005A2 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1042058A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Преобразователь угла поворотаВАлА B КОд | 1978 |
|
SU830461A1 |
| Устройство фазовой автоподстройки тактовой частоты | 1989 |
|
SU1721834A1 |
