(54) ГРАФОПОСТРОИТЕЛЬ . Изобретение относится к приборостроению и может быть использовано в графических аналоговых и аналого-цифровых двухкоординатных регистрирующих устрой- ствах. Для регистрации данных, поступающих от аналоговых вычислительных машин (АВМ), обычно импользуются графопостро тели, включающие в свой состав каналы записи входных аналоговых сигналов по. оси абсцисс и оси ординат, построенные по известной схеме следящего уравновешива-Нин. Ll. Эти графопостроители могут быть использованы и для регистрации информации, поступающей от ЦВМ, В этом случае цифровые данные преобразуются с помсяцыо цифро-аналогового преобразователя в напряжения, поступающие на входы аналогс вых следящих систем графопостроителя. Метрологические показатели указанных графопостроителей в ряде случаев уже не удовлетворяют современным требованиям. В связи с возрастанием объема инфсрма- ции в настоящее необходимо увеличивать производительность, т.е. быстродействие графических устройств, при сохранении высокой точности регистрации данных, близкой к точности, достигаемой в статическсч л режиме. Известно графическое двухкоординатное устройство, содержащее основную следящую систему и корректирующую, включенную параллельно основной 2J., Обе следящие системы охвачены общей отрицательной обратной связью по положению. Построение графопостроителя по такой схеме позволяет повысить точноЬть регистрации, однако эффективность коррекции погрешностей осноиюй следящей системы в этой схеме недостаточна. Кроме того, максимальное значение результирующей добротности следящей системы, состоящей из двух параллельных каналов, ограничивается условиями устойчивости.., . Повышение точности регистрации в таком графопостроителе достигается за счет подъема частот с псалощью кс ректирующего канала. При правильнсчи выборе коэффициентов передаточной функции дифференциатора, которые связаны с другими параметрами еле дящих систем шределенной зависимостью, псгр шность регистрации в ограничение Диапазоне частот входных сигналов мо-,. жет быть минимизирована з . Однако минимизация псгреишостей регистрации при построении графопостроителя по рассматриваемой схеме достигается лишь при идеальной настройке в нсрмальных УСЛОВИЯХ, а при изменении параметров узлов следящих систем под воздействием внешних дестабилизирующих факторов {температуры, напряжения, питания, износа механических деталей, старение элементов и т.п.) приращения погрешности практичеоки не отличаются от .соответствующих приращений в известных графопостроителях, не имеющих корректирующих каналов. Наиболее близким по технической к предлагаемся 1у является графопостроитель, который содержит каналы запйси входных сигналов на оси абсцисс и оси ординат, лентопротяжный механизм, преобр зоЕЛтель вращательного движения в поступательное, механически связанный с регистрирующим срганом, Каждый канал записи входных сигналов содержит основную и корректирующую следящие системы, йричем основная еледшцая система содержит устройство сравнения и посЛедователь гно соединенные усилитель и двигатель, ме- ханически связанный с .регистрирующим органсяи и с обратным преобразователем, ВйкЬд которого соединен с первым входом устройства сравнения, второй вход которого соединен с источником входного сигна л;а, а корректирующая следящая система содержит устройство сравнения и последовательно соединенные усилитель и двигатель, механически связанный с обратаым преобразователем. Выход которого соединен с первым входом устройства сравнения J4J. Построение графопостроителя nd рассма риваемой структурной схеме позволяет . снизить погрешности регистрации не толь тко в статическом {эежиме, но и динамичеоХиё погрешности, при изменении входных сигналов с постоянной скоростью. ПЬвыше- ние точности достигается благодаря тому, что сигнал, прся1Орци«1алы1ый погрешнооги основной следящей системы, поступает на Вход кoppeiKтирующей следящей системы и преобразуется последней в перемещение
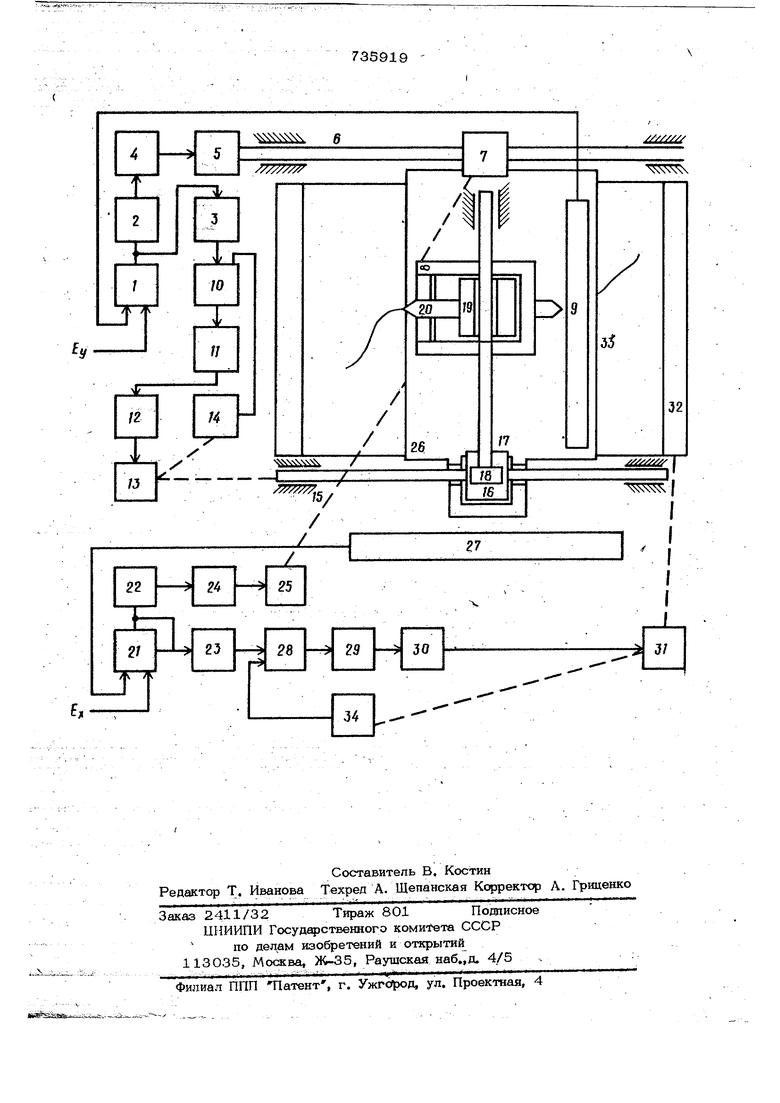
735919 второй каретки, которое суммируется с перемещением первой каретки и ксадпенсирует тем самым погрешйость основной еле- . дящей системы. Однако это устройство имеет, следующие существенные недостатки: снижение точности регистрации при переменной скорости изменения ЕОСОДНОГО сигнала и низ- , кое быстродействие. При изменениях скорости нарастания или убывания входного сигнала ошибка основной следящей системы уже не является постоянной величиной. Поэтому в рассматриваемом режиме на вход корректирующей следящей системы поступает переменная величина, частотный спектр которой в линейном режиме рабрты определяется, спектром входного сигнала с полосой пропускания основной следящей сист&мы. . Чем выше частота входного сигнада и чём меньше полоса пропускания основной следящей системы, тем больше амплиту- , да сигнала ошибки, поступающего на вход корректирующей следящей системы. В связи с тем, что корректирующая следящая система характеризуется астатиэмом первого порядка и ее полоса пропускания ограничена сверху частотой ,зн чения которой не превышают единиц или десятков герц. Сигналы с частотами воспроизводятся на выходе корректирующей системы с большими погрешностями. Поэтому погрётшости основного канала не будут полностью-сксжлпенсированы и в рассматриваемом режиме наблюдаются значи- тельные. результирующие погрешности регистрации графопостроителя. Увеличение погрешностей при изменениях сксрости входного сигнала в графопостроин теле, принятие за прототип, связано также с тем, что двигатель основной следящей системы перемещает весьма тяжелую систему, содержащую не только первую и вторую каретки, но и связанный с ними дв гатеJib корректирующей следящей системы. . Увеличение массы и сротЬетственно момента инерции, подвижных частей оснрвной следящей системы увеличивает погрешности последней пр1и изменениях скорости . нарастания (убывания) входных сигналов, и, как следствие этого, возрастают абсо-лютные значения погрешностей на выходе корректирующей следящей системы и результ1фу1оЩйе йогрешности регистрации гр фсятостроителя. Увеличение массы подвиж;ных частей приводит при прочих условиях к снижению быстр ode йствйя гра5735фопостроителя, т.е. к увеличению времени пробега регистрирующим органом поля носителя записи по координатам X и У. Целью изобретения является снижение динамических погрешностей при nqpeMeHHOE 5 изменения входного сигнала и увеличение быстродействия графопостроителя. ,г. Указанная цель в предлагаемом графо 1построителе достигается благодаря тому. . что в каждый канал записи входных сиг- ,,налов по оси абсцисс и оси ординат, со„г-держащий основную и корректирующую еледящие системы, введены три интегр дифференцирующих звена, входы первого и второго интегро-дифференцирующих звеншв соединены с вькодами устройств сравнения ОСНОВНОЙ и корректирующей следящих систем соответственно, выходы первого и второго интегро-дифференцирующйх звень-/ feB соединены с нходами усилителей йои и корректирующей следящих систем соответственно, вход первого интегро-шфференцирующегр звена соединен с входом третьего интегро-дифференцирующего звена, выход которого соединен со вторьш нходом устройства сравнения корректирую , . щей следящей системы, в графопострО№I г гтель введена зубчатая передача, которая механически соединена с преобразователем вращатольпого движения в поступательное и с двигателем корректирующей следящей системы канала записи входньтх сигналов по оси ординат, а двигатель корректирующей следящей системы канала за- писи входных сигналов по оси абсцисс мёханически соединен с лентопротяжным м ханизмой.. На чертеже представлена структурная схема предлагаемого устррйства. На второй вход устройства сравнения 1 основной следящей системы канала записи по оси ординат поступает входной сйгнал Е . Выходное напряжение устройства сравнения поступает на входы интег- ро-дифференцирующих звеньев 2 и 3, а выходной сигнал звена 2 - на вход последовательно включенных усйЛитёйя 4 и дв№гателя 5, Выходной вал двигателя 5 передает свое вращение оси 6, имеющей лыоку по всей длине, которая обеспечивает поступател ьное перемещение втулки 7 по оси 6 с возможностью вращения втулки 7 от оси 6. Втулка 7 с помощыо ременной или тросоврй передачи связана с каре-ркой 8, на которой установлен движок,- поремещающийся по реохорду обратного пре, обрааователя 9 (этот преобразователь 196 может быть вьтолнен и бесконтактным). -Выходное напряжение преобразователя 9 поступает на первый вход устройства cpaj&нения 1. Выходной сигнал интегро-ди ференцирующ го звена 3 поступает на второй вход устройства сравнения. 10, выходное nanpakeHHe которого подается на последователыю включенные интегро-дифференцирующее звепо 11, усилитель 12 и „ 1,« 10 „ двигатель 13, которьш механически свя ,.,-i л / зан с обратным преобразователем 14 (об- ра-шьтй преобразователь может быть, например, вьтолнен в виде кругового vac Выходной сигнал преобразователя поступает на первый вход устройства сравнения 1О Двигатепь 13 передает вращение не бёратаого преобразователя 14, но и утгоавляющей оси 15, которая ,у „ обеспечь возможность перемещения в-хулки 16 „ одновременным вращением вращении оси 15. Вращение втулки 16 передается оси 17 помощыо зубчатой передачи, йапример ервячной или конической передачи 18. Консчрукция оси 17 аналогична конс1рук , г циям осей 6 и 15, благодаря чему она , г ре дает вращение втулке 19, которая явля преобразователя вращательно движения оси 17 в поступательное перемещение ползуна 2О, несущего орган регистрации графопостроителя, , Перечисленные выше электронные и мё ханичёские узлы относятся к каналу запи- си Екодаых сигналов по оси .ординат, узлы 1, 2, 4, 5 -9 относятся к ооновной следящей системе, а узльг 3, 1О20 - к корректирующей следящей системе . в канале записи ЕХОДНЫХ .сигналов по оси X входной сигнал Е поступает на второй вход устройства сравнения 21, с выхода которого сигнал поступает на ахорьг интегро-дифференцирующих звеньев 22 и 23. С выхода звена 22 напряжение поступает на .последовательно включенные усилитель 24 и двигатель 25, который через ременную или тросовую передачу перемещает тележку 26 и связанный с неД движсж реохфда обратного преобразовате- ли 27, выходной сигнал которого посту- дает на первый нход устройства сравнения 21. Вьрсоднбй сигнал интегро дифференцирующего звена 23 поступает на второй вход устройства сравнения 28, выходное напр жение поступает на последоват&пьно щелоченные интегро-дифференцирующее звено 29, усилитель 30 и двигатель 31, который через механическую передачу пер бЕёт 1 ЩёНЙё лёнтшрютяжному мёха нйэму 32, обеспечивающему поступательное перемещение носителя записи, например диаграммной ленты 33. Двигатель 31 передает вращение также обратному преобразователю 34 {который может быть выполнен, например, в виде кругового реохорда или быть бесконтакт ным, например, оптоэ лек тронным). Выхо/ ное напряжение преобразователя 34 поступает на первый вход устройства срав нения 28. В канале записи по оси абсцисс к основной следящей системе отнЬсятся узлы 21, 22, 24, 25, 26, 27, а к коррект1фующей - узлы 23, 28 -34. Узлы 8, 9, 17 - 20 установлены на телезкке 26, которая вместе с втулками 7 и 16 может перемещаться вдоль осей 6 и 15 ио координате X, Устройство работает следующим , Подлежащие регистрации сигналы и Ey(t) поступают на входы, устройств сравнения 1 и 21 соответствующих кана1ОВ записи по оси ординат и оси абсцисс. Основная следящая система канала записи сигналов обеспечивает перемещение каретки 8 и связанного с ней ползуна 20 с регистрирующим органом по оси ординат а осно;з1аая следящая система для записи сигналов Ey{-t) обеспечивает перемещение .тележки 26 с кареткой 8 по оси абсцисс. В результате регистрирующий орган выт черчивает на диаграммной ленте 33 функциональную зависимость Е j F (Е ). Кфректирующие следящие системы осуществляют коррекцию погрешностей основных следящих систем. Таким образом, построение графопостро ителя по предлагаемой схеме позволяет снизить погрешности, возникающие при скачкообразньсс изменениях скорости .. входного сигнала по крайней мере в 10 раз по сравнению с соответствующими погрешностями прототипа. Вторым важным преимуществом предлагаемого графопостроителя является зн&читёльно большее быстродействие, в осо-. бенности по координате У по сравнению с быстродействием устройства, принятого за прототип Повышение быстродействия обусловлено тем, что на тележке 26 отсутствуют какие-либо двигатели и связанные с ними Механические передачи, что обеспечивает существенное уменьшение массы тележки по сравнению с массой подБИх(ной системы прототипа, которая (по координате У) со держит два двигателя и другие механичес кие узлы. Снижение массы подвижньк частей, перемещающихся по координа те У, в предлагаемом графопостроителе достигнуто благодаря введенной зубчатой передаче, обеопечивающей перемещение ползуна 20 с рег ICтpиpyющим органом при вращении вала корректирующего двигйтеля, установленнотго вне тележки. Снижение массы .тележки, перемещающейся в предлагаемом гра({)опостроителе по оси абсцисс, достигнуто благодаря то-. му, что на тележке отсутствуют какие-либо узлы, относящиеся к корректирующе,й следящей системе, а коррекция погрещностей осуществляется за счет перемещения йоси- теля записи. Построение графопостроителей по предлагаемой схеме обеспечивает повышение точности и быстродействия, характеризуемое максимальными погрещностями 0,04% и 0,01% и скоростями регистрации 1 и 0,25 м/с соответственно. Выссжая динамическая точность предлагаемых графопостроителей позволяет осуществлять высокоточную запись не только медленно изменяющихся параметров, но и быстро протекающих tiponeccoB с частотным спектром порядка 5О-10О Гц. Повыщение производительности и точности процесса регистрации измерительной информации позволяет существенно (в 510) раз сократить время проведения дорогостб5пцих научных экспериментов, что обеспечивает получение значительного технико-экономичёского эффекта. По данным ЦИ.АМ сокращение времени испытаний и снятия характеристик авиац онных двигателей благодаря применению графопостроителей по предлагаемой схеме позволит получить техникЬ экономический эффект псрядКа 200 тыс.рублей на 1ОО приборов за один год. Формула изобретения Графопостроитель, содержащий каналы записи входных сигналов по оси ординат и оси абсцийс, лентопротяжный механизм. преобразователь вращательного движения в поступательное, механически связанный с регистрирующим органом, каждый канал залиси входных сигналов содержит осно&ную и ко{фектирующую следящие системы.,
973591910
причем основная следящая система содер- и корректирующей следящих систем устройство сравнения и последователь ветственно, вход первого интегро-дифференно соединенные усилитель и двигатель, м шфующего звена соединен с входом треть ханически связ 1нный с регистрирующим его интегрс дифферендирующего звена, въ ганом и с обратным преобразователем, 5 ход которогс, соединен со вторым входом ход которого соединен с первым входомустройства сравнения корректирующей елеустройства сравнений, второй исод котсро- дящей систе1йы, зубчатая передача соедиаен с источником входасяго сигна- нически соединена с преобразователем }ала, а корректирующая следящая система1аательвого вдвижешш в поступательное
содержит устройстЕЮ сравнения и последо- о и с двигателем кqppekтиpyюЩeй следящей вателыю соединеиные усилитель и двига- - системы канала записи кходаых сигналов тель, механически связанный с обратным по оси с динат, а даигатель ксрректируюпреобразователем, выход которого соединен щей следящей системы канала записи входс первым входом устройства сравнения,ных сигналов по оси абсцисс механически
отл и. чающийся тем, что, с у, соединен с лентояротяжным механизмом. целью повьгаения Динамической точностиИсточники внфсфмащ1И,
и быстродействия, в- него введена зубча- принятые во :вниманиё- при экспертизе тая передача и в каждый канал записи1. КотченкО. Следящие системы автоманходных сигналов введены три интегро-ди( тических компенсаторов, Л., Heapai, 1965, ференцирующих звена, входы первого и 2. Авторское смидетельство СССР рого интегро-дифференцйрующих звеньев№ 57959,6, кл. G05 В 11/00, 1974.
соединены с выходами устройств сравнения3, Марголин Ш. М. Дифференциальный
основной и корректирующей следящих сио- элек-фетфивод, М., Энергия :,- 1975, тем соответственно, выходы первого и вто- с. 163, рис, 4--26. рого интегро-дифференцирующих звеньев 25 4, Патент США № 3,449.754, соединены с входами усилителей основной кл. 346-29, 1о,06.69 (прототип).
6
//X///X/

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| Многоточечное регистрирующее устройство | 1976 |
|
SU609955A1 |
| Устройство для регистрации и измерения интермодуляционных и побочных каналов приема в частотноселективных цепях нелинейных приборов | 1980 |
|
SU949830A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| Система управления следящим приводом портала машины термической резки | 1990 |
|
SU1757811A1 |
| Устройство для контроля параметров | 1976 |
|
SU638918A1 |
| Устройство для определения энтальпии перегретого пара | 1990 |
|
SU1778442A1 |
| Устройство для контроля и регистрации нагрузочных характеристик транспортных средств | 1976 |
|
SU746642A1 |
| Устройство отображения полутоновой информации | 1981 |
|
SU1030999A1 |
I
/0
f
;4
f,
34
32
