резонансной частоты, изменяемой в функции величины магнитного потока двигателяа Однако эффективность действия этого устройства ограничена тем, что, вопервык, колебания тока вследствие инерционности двигателя отличаются от колебаний момента упругой связи, и, во-вторых, устройство не осуществляет демпфирующего действия вне зоны действия токовой отсечки.
Цель изобретения - увеличение э4фек- тивности демнфирования колебаний в диапазоне ВЫСОКИ.Х частот.
Это достигается тем, что в устро-йство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом и регулируемыми . преобразователями в цепи якоря и в цепи возбу)1сдения двигателя, содерж ицем датчик тока якоря двигателя, дополн лтельно введены датчик магнитного потока двигателя и последовательно включенные блок перемножения, блок суммирования с подключенным к нему источником сигнала, пропорционального моменту сопротивления механизма, динамическое звено с передаточной функцией
W(rt где Jb - собственная частота недемпфированных мгханическах колебаний, и операционный ycvmHTeiib, на входе которого включен нелинейный элемент, имеющий параболическую характеристику. При этом ко входам блока перемнож;ения подключены выходы датчиков тока якоря и магнитного потока двигателя, 0 выход операционного усилителя соединен со входом одного из регулируемых преобразователей.
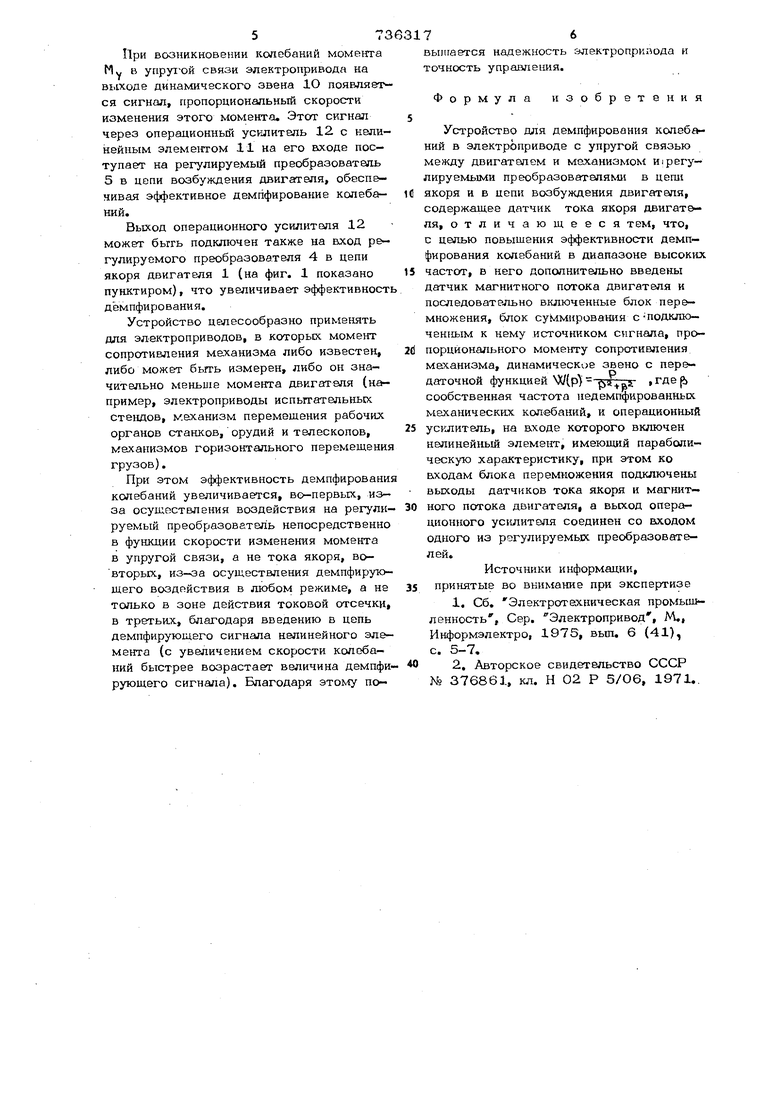
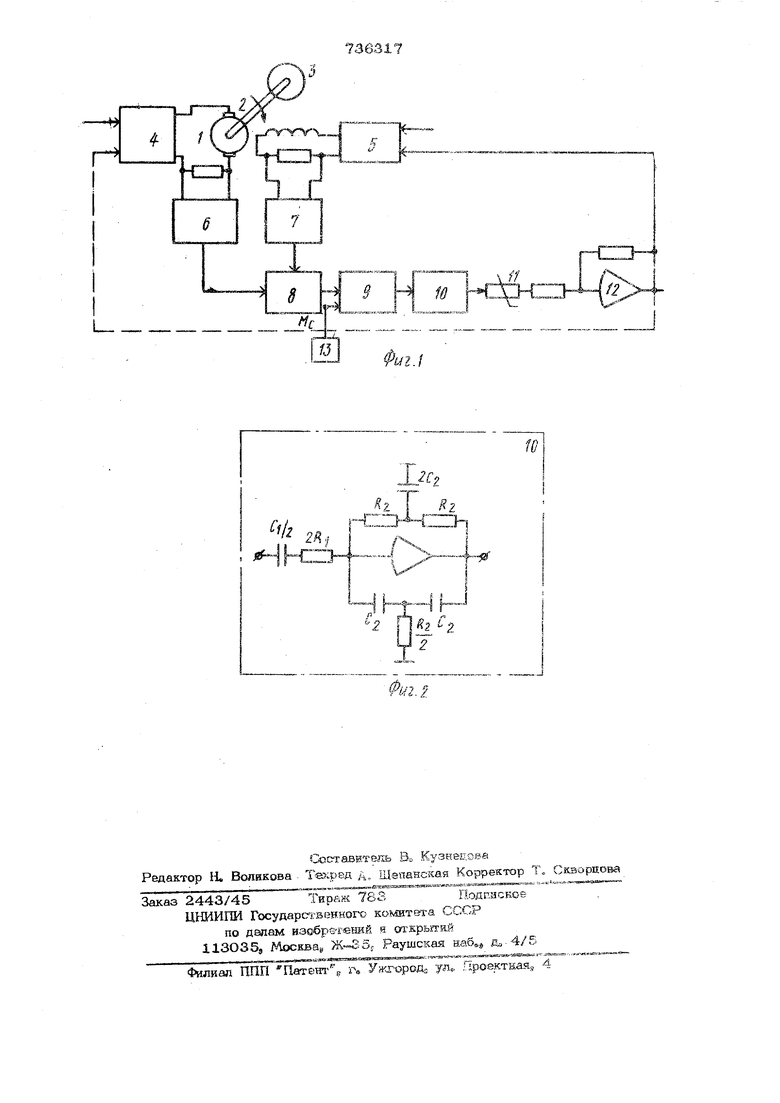
На фиг, 1 изображена схема гаемого ус1ройства ; на фиг, 2 - пример выполнения входящег-о в это устройство динамического звена.
Двигатель 1 электропривода через упругую связь 2 соединен с механизмом 3, В цепь якоря двигателя включен регулируемый преобразоватвдь 4 с системой управления, а в цепь возбуждения двигателя включен регулируемый преобразователь 5 с системой управления. Выходы датчиков тока якоря 6 и магнитного потока 7 двигателя подключены к двум входам блока перемножения 8, выход которого через блок суммирования 9, динамическое звено Ю, нелинейный элемент 11 и операционный усилитель 12 соединен со аходом регули зуемого преобразо.
вателя 5 в цепи возбулшения двигателя. Ко входу блока суммирования 9 нодкл1рчен также источник 13 сигнала, пропорционального к оменту сопротивления М., механизма 3.
Передаточная фущсция динамического звена 10 в соответствии с указянным выше условием равна
(О
где и - собственная частота недемпфированных маханическах колеба- 15ii4K.Выбрав величину равной
r-f(VTj(
а коэффициенты усиления блока cyMJviHрования 9 по входу, подключенному к выходу блока перемножения 8, равным
К -Т )
251-
И ПО входу, к которому подключен источник сигнала, пропорциональнохх) моменту сопротивления М ( , равным
, ()
где 4,3,- моменты инерции двигателя
1 и механизма 3, С, - жесткость упругой связи 2 гго/1учаем на выходе динамического звена сигнал, пропорциональный скорости изменения момента My в упругой связи
).
где С.Ч- - ток якоря и магнитный поток
двигателя,
С. - коэффициент пропорциональности. Один из возможных вариантов реализации динамического звена 10 на операционном усилителе (фиг. 2)который обеспечивает получение передаточной функции (1) с учетом выражения (2) при выборе его параметров в соответствии с условием
/ 2.2-3, Зо
(,e Vc4T% b)
Устройство работает следующим образом.
573
При возникновении колебаний момента My в упрут ой связи; электропривода на выходе динамического звена 1О появляется сигнал, пропорциональный скорости изменения этого момента. Этот сигнал
через операционньп усилитель 12 с нелинейным элементом 11 на его входе поступает на регулируемый преобразователь 5 в цепи возбуждения двигателя, обесценивая эффективное демпфирование колеба-
НИИ.
Выход операционного усилителя 12 может быгь подключен также на вход регулируемого преобразователя 4 в цепи якоря двигателя 1 (на фиг. 1 показано пунктиром), что увеличивает эффективност демпфирования.
Устройство целесообразно применять для электроприводов, в которых момент сопротивления механизма либо известен, либо может быть измерен, либо он значительно меньше момента двигателя (например, электроприводы испытательньск стендов, м.аханизм перемещения рабочих органов станков, орудий и телескопов,
механизмов горизонтального перемещения грузов).
При этом эффективность демпфировани колебаний увеличивается, во-первых, изза осуществления воздействия на регулируемый преобразователь непосредственно в функции скорости изменения момента в упругой связи, а не тока якоря, вовторых, из-за осуществления демпфирующего воздействия в режиме, а не только в зоне действия токовой отсечки, в третьих, благодаря введению в цепь демпфирующего сигнала нелинейного элемента (с увеличением скорости колебаний быстрее возрастает величина демпфи- рующего сигнала). Благодаря по-
76
вышается надежность электроприиода и точность управления,
Формула изобретения
Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом И1 регулируемыми преобразователям в цепи якоря и в цепи возбуждения двигателя, содержащее датчик тока якоря двигателя, отличающееся тем, что, с целью повышения эффективности демпфирования колебаний в диапазоне высоки частот, в него дополнительно введены датчик магнитного потока двигателя и последовательно включенные блок перемножения, блок суммирования с-подключенным к нему источником сигнала, пропорционального моменту сопротивления механизма, динамическое звено с передаточной функцией W(p) ,гдер) сообственная частота недемпфированных механических колебаний, и операционный усилитель, на аходе которого включен нелинейный элемент, имеющий параболическую характеристику, при этом ко входам блока перемножения подключены выходы датчиков тока якоря и магнит- ного потока двигателя, а выход операционного усилителя соединен со входом одного из регулируемых преобразователей.
Источники информации, принятые во внимание при экспертизе
1.Сб. Электротехническая промышленность. Сер. Электропривод , М., Информэлектро, 1975, вып. 6 (41),
с. 5-7.
2.Авторское свидетельство СССР № 376861, кл. Н 02 Р 5/О6, 1971..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1986 |
|
SU1319218A2 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Электропривод | 1978 |
|
SU790090A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| Электропривод | 1986 |
|
SU1390756A2 |
| Устройство для регулирования момента в упругой трансмиссии электропривода | 1978 |
|
SU746846A1 |
| Электропривод постоянного тока | 1977 |
|
SU788321A1 |
Ч
