Изобретение относится к длектро- технике, может быть использовано в электроприводах с упругой связью между двигателем и механизмом -и является усовершенствованием изобретения по авт.св. № 736317.
. Цель изобретения - расширение функциональных возможностей электропривода за счет обеспечения его работы при переменной жесткости упругой связи.
На чертеже представлена функциональная схема устройства демпфирования колебаний.
Электродвигатель 1 электропривода через упругую связь 2 соединен с механизмом 3. Жесткость упругой связи зависит от положения механизма 3 относительно электродвигателя 1. В цепь электродвигателя включен первый регулируемый преобразователь 4 с .системой управления, а в цепь возбуждения электродвигателя включен второй регулируемый преобразователь 5 с системой управления. Выходы датчиков тока якоря 6 и магнитного потока 7 двигателя подключены к двум входам первого блока 8 перемножения, выход которого через блок 9 суммирования, динамическое звено 10, нелинейный элемент 11, операционный усилитель 12 соединен с входом регулируемого преобразователя 5 в цепи возбуждения электродвигателя. К входу блока 9 суммирования подключен также источник 13 сигнала, пропорциональ- ньш моменту сопротивления М механизма 3 .
Динамическое звено 10 имеет передаточную функцию
W(P)
где /5 - собственная частота недемпфированных механических колебаний.
Устройство также содержит блок 14 измерения жесткости упругой связи, вход которого подключен к выходу блока 8 перемножения, динамическое зве-- но 10 снабжено двумя корректирующими входами, которые подключены к выходу блока 14 измерения жесткости упругой связи и содержит входной блок 15 перемножения, входы которого являются собственно основным и первым корректирующим входами динамического звена 10, последовательно соединенные первый интегрирующий усилитель
16, второй интегрирую 1щй усилитель 17 и дифференцирующий усилитель 18, выход которого является выходом динамического звена, блок 19 перемножения цепи обратной связи динамического звена, первый вход которого является вторым корректирующим входом динамического звена 10, второй вход соединен с выходом второго интегрирующего усилителя 17, а выход подключен к второму входу первого интегрирующего усилителя 16.
Измерение жесткости упругой связи осуществляется блоком 14 измерения
жесткости, включающим последовательно соединенные блок 20 измерения частоты колебаний момента двигателя, блок 21 возведения в квадрат, масштабный усилитель 22. Блок измерения
частоты колебаний момента двигателя 20 включает анализатор частоты колебаний момента 23, сумматор 24, источник 25 опорного сигнала, пропорционального основной частоте колебаНИИ двухмассовой системы, причем йы- ход анализатора 23 частоты колебаний и вьпСод источника 25 опорного сигнала, пропорционального частоте основных колебаний двухмассовой системы,
присоединены соответственно к первому и второму входам сумматора 24. Устройство работает следующим образом.
Передаточная функция динамического звена 10 равна
W,,(p)
T,,T,,,,
Е . -Il8
т т .
1Ь 1-Т
Т ,Т,т Tig - постоянные времени соответственно интеграторов 16 и 17 и дифференциатора 18, Т , ,
(7 17
19,;
koc коэффициент отрицательной обратной связи, равный передаточному коэффи- циенту блока 19;
р - оператор Лапласа. Для консервативного колебательнозвена, выполненного на операционусилителях 16 и 17 с блоком 19
313
перемножения в цепи жесткой отрицательной обратной связи собственная частота колебаний определяется выражением
(2)
С другой стороны собственная час тот недемпфированных механических колебаний равна
(3)
192184
гой вход этого блока перемножения подается сигнал с выхода блока 1А измерения жесткости упругой связи пропорциональный величине жесткости С, с получаем на выходе динамического звена 10 сигнал, пропорциональный скорости измерения момента М в упругой связи
° рм, (l-c,«.l--M,)-c-----IiV J-i -2 м «т
где -- + -- - коэффициент, .за- « i, ij
висящий от моментов инерции двигателя 1 и момента инерции механизма 1
Из уравнений (2) и (3) следует, что при изменении жесткости упругой связи 2 собств.енная частота механических колебаний меняется и, чтобы в динамическом звене 10 учитывалось изменение жесткости упругого звена, необходимо изменять коэффициент об- ратной связи Kjj пропорционально фактической жесткости упругого звена С. Для этого в цепь обратной связи введен блок 19 перемножения, на один вход которого подается сигнал с выхода консервативного звена, т.е. с выхода второго интегрирующего операционного усилителя 17, а на другой вход сигнал с выхода блока 14 изме- рени жесткости упругого звена, пропорциональный величине жесткости С. При изменении жесткости упругой связи С коэффициент передачи блока перемножения Кд пропорционален жесткости С и частота колебаний динамического звена , меняется и соответствует фактической частоте собственных колебаний механической системы.
Выбрав коэффициенты усиления блока 9 суммирования по входу, подключенному к выходу блока перемножения 8 равным
К - -1 I.
(4)
и по входу, к которому подключен источник сигнала, пропорционального моменту сопротивления К., равным
К - -I I,
(5)
и учитывая то, что выход блока 9 суммирования присоединен к одному выходу блока 15 перемножения, а на дру-fi- С Ф1 + 1- -м Vc - --- -----V f MC р2+к /Т Т
-1-2 . сс
(6)
где С - коэффициент пропорциональности;
I, Ф - ток якоря и магнитный поток двигателя.
Принимая в уравнении (6)
8
RH Cfi
Т,.
1Ь it Rn С тт
1i (7)
ТлТ,
г
(8)
и учитывая то, что Кд -пропорционален жесткости упругой Связи С, имеем уравнение (6) в следующем виде
РМ,
: СмФ1.1-М,).С.-2---.
(9)
Измерение жесткости упругой связи в блоке 14 выполняют косвенным методом, используя зависимость между собственной частотой колебаний двух- массовой системы и жесткостью упругой связи С в соответствии с (3). Блок измерения частоты колебаний 20 измеряет частоту колебаний момента двигателя ы, равную /j , и подают сигнал на вход блока 21 возведения в квадрат, сигнал на выходе которого пропорционален ш /5 Су. Сигнал на выходе масштабного усилителя 22 также пропорционален жесткости С
.Коэффициент передачи масштабного усилителя 22 равен . Анализатор частоты колебаний обеспечивает измерение отклонения йш фактической частоты колебаний момента двигателя от основной частоты и) , взятой при базовой жесткости упругой
связи Cpj.j . Отклонение частоты ли it (.обусповпено изменением жесткости упругой связи С. Сигнал на выходе источника 25 опорного сигнала, пропорционален основной часто- те колебаний момента двигателя ы.„..
ОСп
при базовой жесткости упругой связи С-,„ . Поэтому на выходе второго сумUVH
матора 24 лмеем сигнал, пропорцио- нальньй фактической частоте момента
двигателя и)
При возникновении колебаний момента М в упругой связи электропривод на выходе динамического звена 10 появляется сигнал, пропорциональный скорости изменения момента в упругой связи. Этот сигнал через операционный усилитель 12 с нелинейным элементом 11 на его входе поступает на регулируемый преобразователь 5 в цепи возбуждения двигателя, обеспечивая демпфирование колебаний.
При изменении жесткости упругой связи между двигателем 1 и механизмо 3 изменяется частота колебаний момен та в упругой связи и момента двигателя, поэтому изменяется сигнал на выходе блока 20 измерения частоты колебаний момента двигателя и сигнал на выходе масштабного усилителя 22, который пропорционален жесткости упругой связи. Так как сигнал с выхода масштабного усилителя 22 подается на входы блоков 15 и 19 перемножения то в соответствии с уравнением (9) изменяются амплитуда и частота демпфирующего сигнала на выходе динамического звена 10 в зависимости от переменной жесткости упругой связи. При этом обеспечивается зффектив- ное демпфирование колебаний при любой жесткости упругой связи, так как частота и амплитуда демпфируемого сигнала соответствуют фактической жесткости упругой связи и значит соб ственной частоте упругих колебаний двухмассовой электромеханической системы.
Например, с увеличением жесткости упругой связи 2 по сравнению с базо- . увеличивается частота колебаний упругого момента /5 и частота колебаний момента двигателя LO , при этом сигнал на выходе масштабного усилителя 22 возрастает. Так как это сигнал подается на входы блоков 15 и 19 перемножения, то увеличиваются частота и амплитуда демпфируемого
сигнала, получаемого на выходе динамического звена, который.поступая на вход преобразователя 5, имеет амплитуду, частоту и фазу, обеспечивающие эффективное демпфирование колебаний при конкретной жесткости упругой связи. Аналогично изменяются амплитуда и частота демпфирующего сигнала при уменьшении жесткости упругой связи 2. Если жесткость упругой связи неизменна, то на выходе блока 20 измерения частоты колебаний момента сигнал неизменен и на выходах блоков 15 и .19 умножения действует постоянный сигнал, соответствующий базовой жесткости.
Таким образом, предлагаемое устройство обеспечивает эффективное демп- фирование упругих колебаний в электроприводе с переменной величиной жесткости упругой связи между двигателем и механизмом и расширение функциональных возможностей электропривода за счет применения его в электроприводах с переменной жесткостью упругой связи.
Формула изобретения
Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом по авт.св. № 736317, отличающееся тем, что, с целью расширения функциональных возможностей электропривода за счет обеспечения его работы при переменной жесткости упругой связи,в него введен блок измерения жесткости упругой связи, включающий последовательно .соединенные анализатор частоты колебаний, сумматор, блок возведения в квадрат и- масштабный усилитель, источник опоного сигнала, выход которого подключен к второму входу сумматора блока измерения жесткости упругой связи, вход блока измерения жесткости подключен к выходу блока перемножения, динамическое звено снабжено двумя корректирующими входами, которые подключены к выходу блока измерения жесткости упругой связи, и содержит входной блок перемножения, входы которого являются соответственно основным и первым корректирующим входами динамического звена, последовательно соединенные первый интегрирующий усилитель, второй интегрирующий усилитель и дифференцирующий
713192188
усилитель, выход которого являетсявходом динамического звена, второй
выходом динамического звена, блок пе-вход соединен с выходом второго инремножения цепи обратной связи дина-тегрирующего усилителя, а выход подмического звена, первый вход которо-ключен к второму входу первого интего является вторым корректирующим сгрирующего усилителя.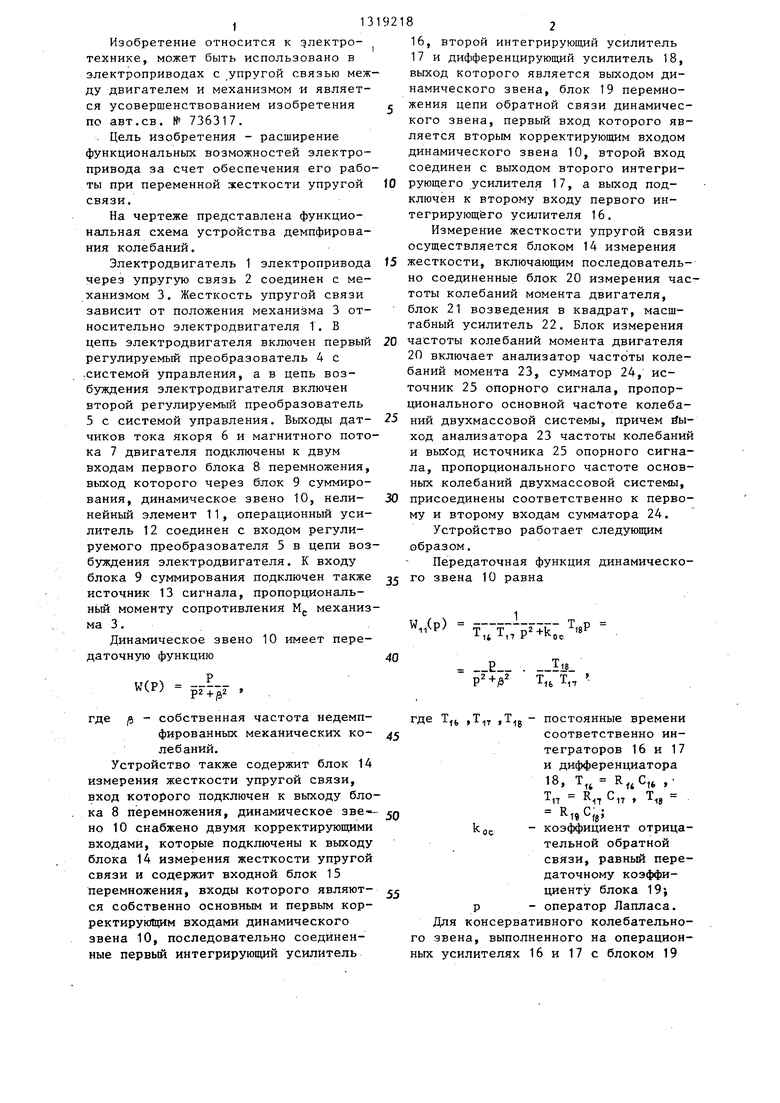
Изобретение относится к электротехнике и может быть использовано в механизмах с упругой связью. Целью изобретения является расширение функциональных возможностей за счет обеспечения его работы при переменной жесткости упругой связи. При возникновении колебаний в упругой связи 2 изменяется по гармоническому закону момент электродвигателя 1 на выходе блока умножения 8. С выхода блока измерения жесткости 14 появляется сигнал, пропорциональный величине жесткости упругой связи. По величине сигнала с помощью блоков 15 и 19 перемножения корректируются амплитуда момента упругости и собственная частота колебаний динамического звена 11, с выхода которого демпфирующий сигнал, согласованный по амплитуде и фазе с величиной жесткости упругой связи 2, подается на регулируемый преобразователь 5. 1 ил. i (П С со tsd 00 o
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1977 |
|
SU736317A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
