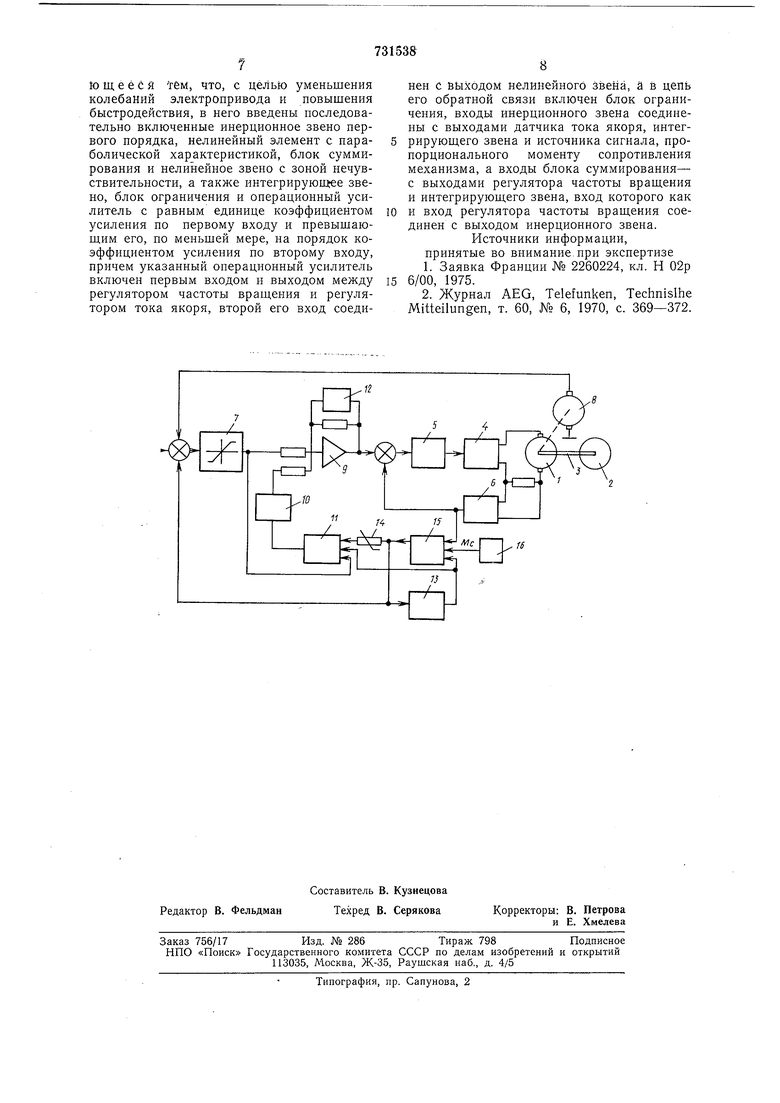
нематической передачей, содержащее последовательно включенные регулятор частоты вращения двигателя с нодключенными к его входу задатчиком н датчиком частоты вращения, регулятор тока якоря с подключенным к его входу задатчнком и датчиком частоты вращения, регулятор тока якоря с подключенным к его входу датчиком тока якоря и регулируемый преобразователь, питающпй двигатель, введены последовательно включенные иперциоппые звено первого порядка, нелииейный элемент с нараболической характеристикой, блок суммирования и нелинейное звено с зоной нечувствительности, а также интегрирующее звено, блок ограничения н оиерациоиный усилитель с равным единице коэффициентом усиления по первому входу и превышающим его по меньшей мере на порядок коэффициентом усиления ио второму входу, причем указанный оиерациоииый усилитель включен первым входом и выходом между регулятором частоты вращения и регулятором тока якоря, второй его вход соединен с выходом нелинейного звена, а в цеиь его обратной связи включеи блок ограничения, входы инерциоиного звена соединены с выходами датчика тока якоря, иитегрирующего звена и нсточиика сигнала, иропорционального моменту соиротивлеиия механизма, а входы блока суммирования - с выходами регулятора частоты вращення и интегрирующего звена, вход которого как н вход регулятора частоты вращеиия соединен с выходом ннерцнонного звена. На чертеже представлена функциональная схема устройства. Устройство для уиравления электроприводом, в котором двигатель 1 соедииеи с механизмом 2 упругой- кииематнческой не; редачей 3, содерл ит питающий двигатель регулируемый преобразователь 4, включенный на его входе регулятор 5 тока якоря с датчиком 6 тока якоря, а также регулятор 7 частоты вращения с нодключеиным к его входу датчиком 8 частоты вращеиия. Между выходом регулятора 7 и входом регулятора 5 включен операционный усилитель 9 с равным единнце коэффициеитом усиления по первому входу, подключенному к выходу регулятора 7, и нревышающим его на порядок коэффициентом усилеиия по второму входу, подключенному к выходу последовательно соединенных нелинейного звена с зоной нечувствительности 10 и блока И суммирования. В цепи обратиой связи операциониого усилителя 9 включеи блок 12 ограничения. Ко входу блока 11 суммировання подключены выход регулятора 7, выходы введенных в устройство иитегрирующего звена 13 и через иелииейиый элемент 14 с параболической характеристикой - инерциопиого звена 15 первого порядка, выход которого подключен также ко входам интегрирующего звена 13 н регулятора 7, а к его входу Подключены выходы датчиков 6, интегрирующего звена 13, а также источник 16 сигнала, ироиорцнональный моменту М сонротивления мехаиизма. Устройство работает следующим образом. Ииерционное звено 15 обеспечивает получение на его выходе снгиала, нропорциоиального скорости РМ изменения момента My в упругой кинематич-еской передаче, если его параметры выбрать в соответствии с выражеиием, определяющим зависимость этой скорости от выходиых величии этого звеиаРМуA:тp(-/д-l-) /; Же-Ж, + где /д, /м - моменты инерции двигателя и механизма; С, /Стр - жесткость и коэффициент трения кииематической нередачи; г - ток двигателя; /См - коэффициент нропорциональностн. Так как выход ииерциоиного звена 15 соединен с входом иитегрирующего звена 13, то на выходе иоследнего получаем сигнал, пропорциональный величнне момента My в упругой кинематической передаче. Звенья 13 и 15 легко могут быть вынолнены с иомощью решающих усилителей. С помощью блока 11 сравнивается выходной сигнал регулятора 7, определяющий требуемое в соответствии с выиолияемым режпмом унравления значение момента в унругой кинематической передаче, с его фактическим значением, поступающим с выхода интегрирующего звена 13, с учетом скорости его изменения, определяемой выходным сигналом ннерциоииого звена 15 и иоступающей на вход блока И через нелииейный элемент 14. В случае малых значеиий получающегося в результате такого сравиеиия выходного сигнала блока 11, лежащих в нределах зоны нечувствительности нелинейного звена 10, на второй вход операционного усилителя 9 снгиал не поступает, и устройство работает как обычная система подчиненного регулироваиия частоты вращения и тока якоря двигателя, что обеснечнвается выбором коэффнцнента зсиления операциониого усилителя 11 ио первому входу, подключенному к выходу регулятора 7, равного единице, и выбором ограничеиия выходного напряження этого усилителя, осуществляемого блоком ограничеиия 12 таким же, как у регулятора 7. Если выходной сигнал блока 11 но модулю больше зоны нечувствительности нелинейиого звена 10, причем момент в упругой кинематической связи с учетом дополнительного сигнала, зависящего от скорости его изменения, меньше выходного сигнала регулятора 7, то сигнал на втором входе операционного усилителя 9 добавляется к сигналу, поступающему на первый вход этого операционного усилителя с выхода регулятора 7 и вследствие большого коэффициента усиления по второму входу быстро увеличивает выходной сигнал операционного усилителя 9 до максимального значения, обеспечивая максимальное задание величины тока якоря и тем самым максимальиую скорость отработки рассогласования. При возннкиовении такого рассогласования по моменту в упругой связи в режиме разгона, когда регулятор частоты врашения находится в зоне ограничения, п иоэтому п операционный усплитель 9 находится па границе этой же зоны, дополнительный сигнал на втором входе оиерациопного усилителя 9 практически не изменяет движения электропривода, так как блок 12 исключает возможность дальнейшего увеличения выходного сигнала оиерациопиого усилителя 9.
Прн изменении знака выходного сигнала блока И, иоступающего на второй вход операционного усилителя 9, этот сигнал вычитается из сигнала, поступающего на первый вход операционного усилителя 9 с выхода регулятора 7, и вследствие большого коэффициента усиления ио второму входу меияет знак выходного иаиряжения операциоииого усилителя 9 и доводит его до максимального значения, обеспечивая уменьшение рассогласования с максимальной скоростью (знак и величина выходного напряжения регулятора 7 при этом могут не изменяться, например, в режиме разгона).
При новом изменении знака выходного сигнала блока 11 процесс повторяется до сведения рассогласования к достаточно малой величине, определяемой зоной нечувствительности нелинейного элемента 10.
Благодаря высокому коэффициенту усиления но второму входу операционного усилителя 9 изменение величины и знака его выходного напряжения близко к релейному, характерному для оптимального ио быстродействию управления, а введение нелинейного элемента 14, имеющего параболическую характеристику, в цепь сигнала, иропорционального скорости изменения момента в упругой кинематической иередаче, нозволяет сформировать функцию нереключения этого сигнала, близкую к оптимальной. Благодаря этому обеспечивается высокая эффективпость демпфирования колебаний и повышается быстродействие, способствующее уменьшенню времени регулирования. В то же время сохранение небольших ЗОИ пропорциоиального управления (вследствие конечного значения коэффициента заиления операционного усилителя 9) и нечувствительности нелинейного звена 10 позволяет исключить характерные для идеального оптимального управления автоколебания в зоне установившегося режима.
Дополннтельное подключение выхода инерционного звена 15 ко входу регулятора 7 обеспечивает введеппе гпбкой обратной связи по моменту в упругой кинематической передаче вблизи установившегося режима, когда регулятор 7 выходит из зоны ограничения, что обеспечивает стабилизацию
электропривода в этом режиме. Прн больших рассогласованиях во время иереходных процессов разгона, торможенпя и реверса эта обратная связь не действует вследствие насыщения в этих режимах регулятора частоты вращения.
Устройство целесообразно применять в электроприводах, для которых момент сопротивления механизма может быть измерен нли известеи, а также в случае незначительиого влияиия .момеита соиротнвленпя на момент в упругой кинематической передаче в переходпых режимах
./„а« -д
или малых возможных отклонении этого момента от известного среднего значения (электроприводы испытательных стендов, механизмов для горизонтального перемещения грузов с гибким подвесом, позицпонпых механпзмов с малым моментом сопротивления). При этом наиболее эффективным является это устройство для электроприводов с малым периодом собственных
колебаний, сравнимых с длнтельностью переходных процессов.
Таким образом, изобретение обеспечивает Змеиьшенпе колебаний электропривода во всех режпмах управления, причем эффектпБНОсть уменьшения этих колебаний повышается в результате формирования максимально допустимого демифирующего воздействия на привод прп возникновении этих колебаний, что повышает также быстродействие и позволяет уменьшить время регулировапия.
Формула и 3 о б р е т е п и я
Устройство для регулирования частоты вращения электроиривода постоянного тока, двигатель которого связаи с механизмом упругой кпнематпческой передачей, содерлчащее последовательно включенные регулятор частоты вращенпя двпгателя с подключеннымп к его входу задатчнком и датчиком частоты вращения, регулятор тока якоря с подключенным к его входу датчиком тока якоря и регулируемый преобразователь, пптающпй двигатель, о т л и ч а7
to щ е ё С и тем, что, с целью уменьшения колебаний электропривода и повышения быстродействия, в него введены последовательно включенные инерционное звено первого порядка, нелинейный элемент с параболической характеристикой, блок суммирования и нелинейное звено с зоной нечувствительности, а также интегрируюш:ее звено, блок ограничения и операционный усилитель с равным единице коэффициентом усиления по первому входу и превышаюш,им его, по меньшей мере, на порядок коэффициентом усилеиия по второму входу, причем указанный операционный усилитель включен первым входом и выходом между регулятором частоты враш,еиия и регулятором тока якоря, второй его вход соеди8
нен с выходом нелинейного звена, а в цепь его обратной связи включен блок ограничения, входы инерционного звена соединеиы с выходами датчика тока якоря, интегрируюшего звена и источника сигнала, пропорционального моменту сопротивления механизма, а входы блока суммирования- с выходами регулятора частоты враш,ения и интегрирующего звена, вход которого как
и вход регулятора частоты враш;ения соединен с выходом инерционного звена.
Источники информации, принятые во внимание, при экспертизе
1.Заявка Франции № 2260224, кл. Н 02р 6/00, 1975.
2.Журнал AEG, Telefunken, Technislhe Mitteilungen, т. 60, № 6, 1970, с. 369-372.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство для регулирования момента нагрузки в упругой механической связи электропривода | 1978 |
|
SU765960A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1986 |
|
SU1319218A2 |
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1977 |
|
SU736317A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
54
/
fS
