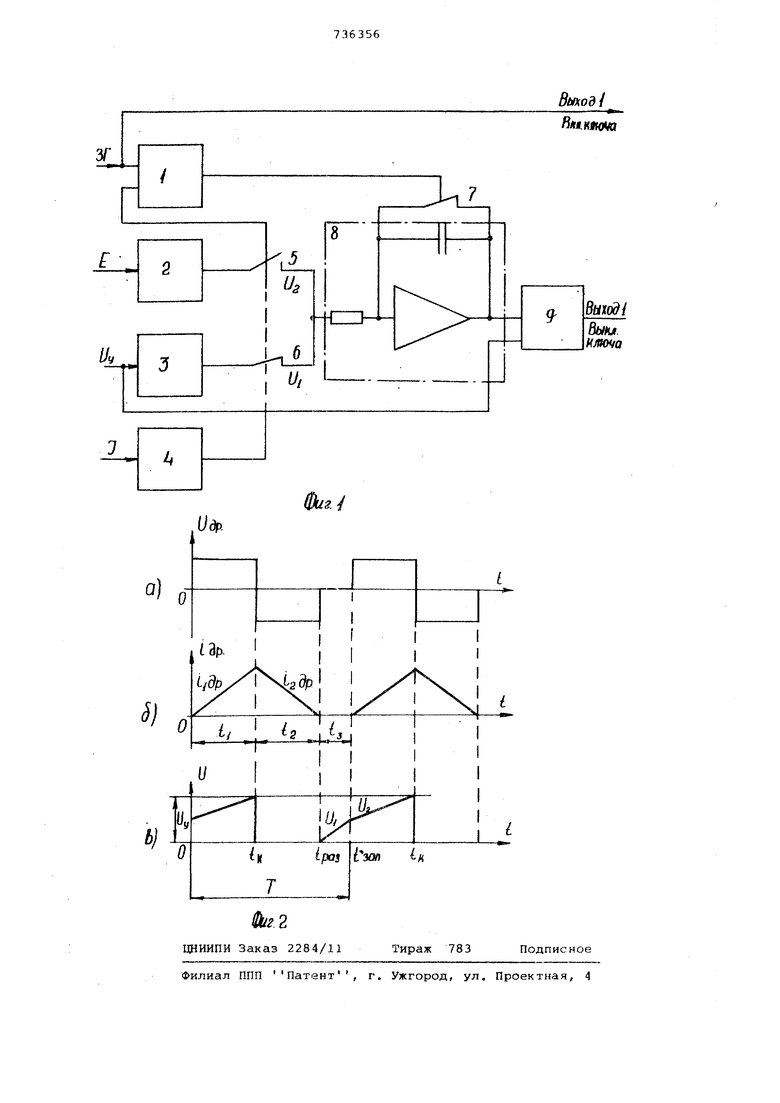
Изобретение относится к преобразовательной технике и может быть исполь зовано для управления широтно-импульс ными преобразователями постоянного то ка (ШИП) с LC-фильтром. Известен способ управления ШИП с LC-фильтром на выходе, обеспечивающи стабильность выходного напряжения ка в режиме непрерывного, так и прерывистого тока при неизменном входном напряжении Е const 1. Для компен сации изменений внешней характеристи ки ШИП в прерывистом режиме в систему импульсно-фазового управления (СИФУ), вырабатывающую импульсы в фиксированные моменты времени, вводи ся дополнительное устройство, осущес вляющее коррекцию фазового угла управления тиристором в цепи реактора таким образом, что выходное напряжение остается неизменным во всем диапазоне изменения тока реактора, В сформированной таким образом кривой определяются точки перехода тока из области отрицательных значений через нуль и в эти моменты формируется импульс, включающий тиристор в цепи реактора. Недостаток способа - большая сложность устройств, реализующих этот способ. Наиболее близким техническим peuiaнием к данному является способ управления широтно-импульсным преобразователем с ключевыми элементами и входным реактором LC-фильтра, состоящий в том, что формируют опорное напряжение путем многошагового интегрирования, сравнивают напряжение развертки с напряжением управления и в момент их равенства формируют управляющие импульсы 2}. В этом способе необходимо формировать пилообразное напряжение, состоящее из трех участков и определять максимум кривой питающего напряжения, что представляет трудность при искажениях формы кривой. Кроме того, этот способ не обеспечивает неизменности выходного напряжения ШИП.при изменении входного напряжения. С целью получения жесткой внешней характеристики и,неизменности выходного напряжения при колебаниях входного напряжения формируют опорное напряжение путем двухшагового интегрирования, первый шаг интегрирования начинают в момент, совпадающий с моменто перехода тока реактора через нуль из области положительных значений в режиме прерывистого тока, второй шаг интегрирования начинают в момент, со падающий с тактовым импульсом для за кикания ключевого элемента в режиме непрерывного тока и прекраицают в момент выключения ключевого элемента, скорость развертки на первом шаге устанавливают пропорциональной фик сированному сигналу, на втором -- вхо ному напряжению, причем степень компенсации возмущений выбирают отио1ие нием величин фиксированного сигнала управления либо изменением периода модуляции. На фиг. 1 представлен один из вариантов структурнойсхемы устройства на фиг, 2 - кривые напряжений и токо на элементах ШИП. В непрерывном стационарном режиме кривая тока на периоде повторяемости состоит из двух участков t и , участок бестоковой паузы t-а, (фиг. 26 Отсутствует. Связь среднего значения выходного напряжения с входньгм при этом определяется соотношением (1) в прерывистом режиме кривая тока реактора состоит из 3-х участков: t , tj, tj. Выходное и входное напряжение в стационарном режиме в этом случае с заны соотношением , AI , t,4t2 t + t2 i Т является общей Соотношение (2) формой записи: при t t2 Т выра жение (2) имеет вид (1) , При постоянном угле управления мо мент замыкания ключевого элемента является фиксированным на периоде повторяемости, при этом t const. В непрерывном режиме продолжител ность участков t и t2 Т - t явл ется постоянной, так как Т const, при этом выполняетсясоотнсясение (1 благодаря чему обеспечивается жесткость внешней характеристики. С пер ходом к прерывистому стационарному режиму при фиксированном фазовом уг ле управления t const продолжительность интервала t2 уменьшается. В соответствии с (2) уменьшение t сопровождается ростом выходного напряжения . Из изложенного следует, что жест кость внэаней характеристики сохраняется во всем диапазоне изменения тока реактора при выполнении услови -- const. причем выходное напряжение пропорци онально входному, Устройство для управления ШИП со держит электронные ключи 1, 2, 3, пропорционсшьные ззенья 4, 5с коэффициентами передачи К2 и К1 соответственно, логическое устройство б, датчик 7 перехода тока реактора через нуль, широтно-импульсный модулятор, состоятдий из интегратора 8 и компаратора 9„ Устройство для управления ключевым элементом ШИП содержит задающий генератор (ЗГ) (на чертеже не показан) , работающий с постоянной частотой, определяющий моменты тактовых импульсов для замыкания ключевого элемента и модулятор с пилообразным развертывающим сигналом, определяющий моменты размыкания ключевого элемента. Согласно данному способу пилообразный развертывающий сигнал систеъ/ы управления образовывается следующим образом. Скорость развертывающего сигнала Uj на отрезке времени от момента , заг1ыкания ключа до момента t. сравнения указанного сигнала с сигналом управления устанавливают пропорционально входному напряжению, а на отрезке времени (tpg,- tj) от момента перехода тока через нуль из области положительных значений до момента форьшрования импульса задающего генератора устанавливают пропорциональным фиксированному сигналу Uj . Степень компенсации в этом случае определяется отношением величин фиксированного сигнала и сигнала управления. При этом пилообразную развертку систекяа управления ШИП запускают в режиме непрерывного тока реактора импульсом, совпадающим с тактовьлм и в режиме прерывистого тока реактора импульсом, совпадающим с моментом перехода тока реактора через нуль из области положительных значений, УсганоЕИМ связь между временными интервалами t к tj и параметрами устройства., В соответствии с фиг. 2в cj . где НС tr постоянное времени интегратора, и„ .К Е (К - коэффициент пропорциональности) . Пбсле интегрирования получаем кс г t,j) + KEti U,,t-, (3 и. (t. + U,t что при условии дает Etj JVH (6) ЦТ С учетом (2)
Таким образом, выходное напряжение определяется только величиной напряжения управления и не зависит от изменения как нагрузки, так и входного напряжен-ия.
Из условия (5) видно, что степень компенсации можно изменять, изменяя соотношение между U и U или С и Т. ,Для нрпрерывного режима ti
jKEdi-U
RC о
ИЛИ
ЧТО с учетом (1) дает полностью совпадающее с (7) выражение.
Устройство работает следующим образом.
Логическое устройство 6 обеспечивает в непрерывном режиме работы сброс с интегратора 8 импульсом внешнего задающего генератора, а в прерывистом режиме - сброс с интегратора 8 в момент перехода тока реактора через О из области положительных значений.
В непрерывном режиме ключ 1 замкнут в течение всего периода работы ШИП, ключ 2 соответственно разомкнут т. е. и 0, а на интегратор 8 поступает напряжение Uj KjiE,
На выходе интегратора 8 формируется пилообразное напряжение, поступающее далее на сравнение с напряжением управления V на компараторе 9,
В момент равенства сравниваемых напряжений компаратор 9 меняет свое, состояние на противоположное - происходит формирование выключающего импульса ШИП.
В прерывистом режиме датчик 7 перехода тока реактора через нуль фор.мирует импульс, соответствуюдай по длительности бестоковой паузе,, замыкает ключ 2 и размыкает ключ 1. Фиксированное напряжение U в течение промежутка t-j (фиг. 2) поступает на вход интегратора 8 (первый шаг интегрирования).
(фиг. 2) ключ 2 разВ момент t
эап
квыкается, ключ К1 закыкается, на вход интегратора поступает напряжение и2. - второй шаг интегрирования-, продолжгиощийся до прихода сигнала сброса интегратора с логического устройства 6 (интервал t,
..t на
эап фиг. 2).
Степень компенсации возмущений или степень коррекции внешней харак
теристики ШИП определяется коэффициентом передачи К1 звена 5, то есть соотношением фиксированного напряжения и и напряжения управления и,,
Использование данного способа управления -ПОЗВОЛИТ значительно снизить
затраты на рггулирование и стабилизацию выходного напряжения ШИП, а в ряде случаев вообще исключить систему автоматического регулирования выходного напряжения, поскольку способ
Обеспечивает независимость выходного напряжения от параметров нагрузки и питающего напряжения. Кроме т.ого, предлагаемый способ позволяет 5 лучшить динамические характеристики ШИП
и повысить устойчивость системы.
Формула изобретения
2Q Способ управления широтно-импульсным преобразователем с ключевыми элементами и входным реактором LC-фильтра, состоящий в том, что формируют опорное напряжение путем многсяаагового интегрирования, сравнивают напря25
;жение развертки с напряжением управления и в момент их равенства формируют управляющие импульсы, о т л ичающийся тем, что, с целью..
получения жесткой внешней характериситики и неизменности выходного напряжения при колебаниях входного напряжения формируют опорное напряжение путем двухиагового интегрированияг. первый шаг интегрирования начинают 5 в момент, совпадающий с моментом перехода тока реактора через нуль из области положительных значений в режиме прерыБкстого тока, второй шаг кнтегрирювания начинают в момент, сов(3 падающий с тактовым импульсом для заг шкания ключевого элемента в режиме непрерывного тока, и прекращают в момент выключения ключевого элемента, скорость развертки на первом шаге усс танавливают пропорциональной фиксированному сигналу, на втором - входному напряжению, причем степень компенсации возмущений выбирают отношением величин фиксированного сигнала и сигнала управления либо изменением периода
50, модуляции.
Источники информации, принятые во внимание при экспертизе 1. Ж. Электричество, 10, 1975, с. 75-77.
55 2. Авторское свидетельство СССР № 530415, кл. Н 02 Р 13/18, 1974.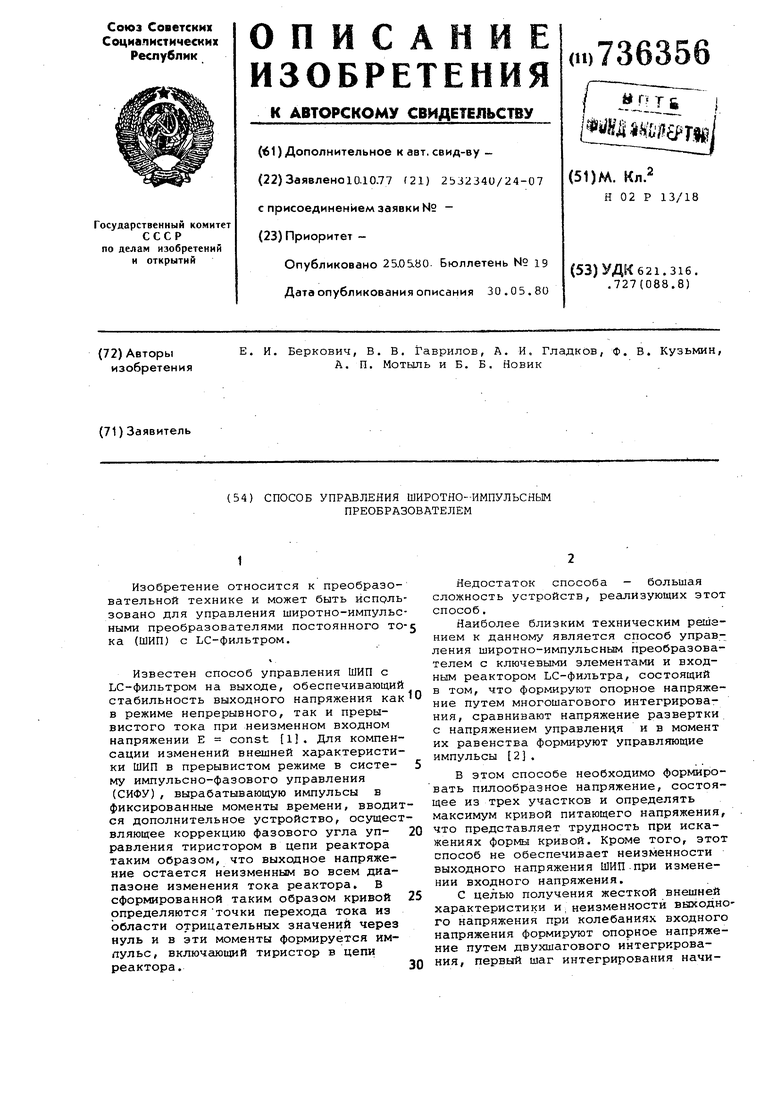
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления инвертором | 1976 |
|
SU647834A1 |
| Способ обеспечения синхронной параллельной работы автономных инверторов | 1976 |
|
SU640393A1 |
| Способ управления инвертором | 1974 |
|
SU530415A1 |
| РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 1999 |
|
RU2153764C1 |
| Способ управления инвертором тока | 1974 |
|
SU531243A1 |
| Способ управления вентильным компенсатором | 1975 |
|
SU898584A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ОДНОФАЗНОГО КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2444838C1 |
| Адаптивный регулятор | 1983 |
|
SU1228194A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| Способ управления -фазным вентильным преобразователем | 1977 |
|
SU743157A1 |