1
Изобретение относится к складскому хозяйству, в частности к стеллажам.
Известен стеллаж, содержащий каркас, связанный с расположенными в несколько ярусов подвижными в горизонтальной плоскости полками 1. .
Однако для перемещения полок в известном стеллаже необходимую использовать приводную тележку с электромагнитными фиксаторами, что усложняет конструкцию стеллажа.
Целью настоящего изобретения является упрощение конструкции.
Это достигается тем, что на каркасе под полками закреплены качающиеся от привода П-образные рамы, на которых установлены упомянутые полки, при этом рамы связаны с приводом посредством тяги, на-которой расположены упбры, взаимодействующие с упомянутыми рамами.
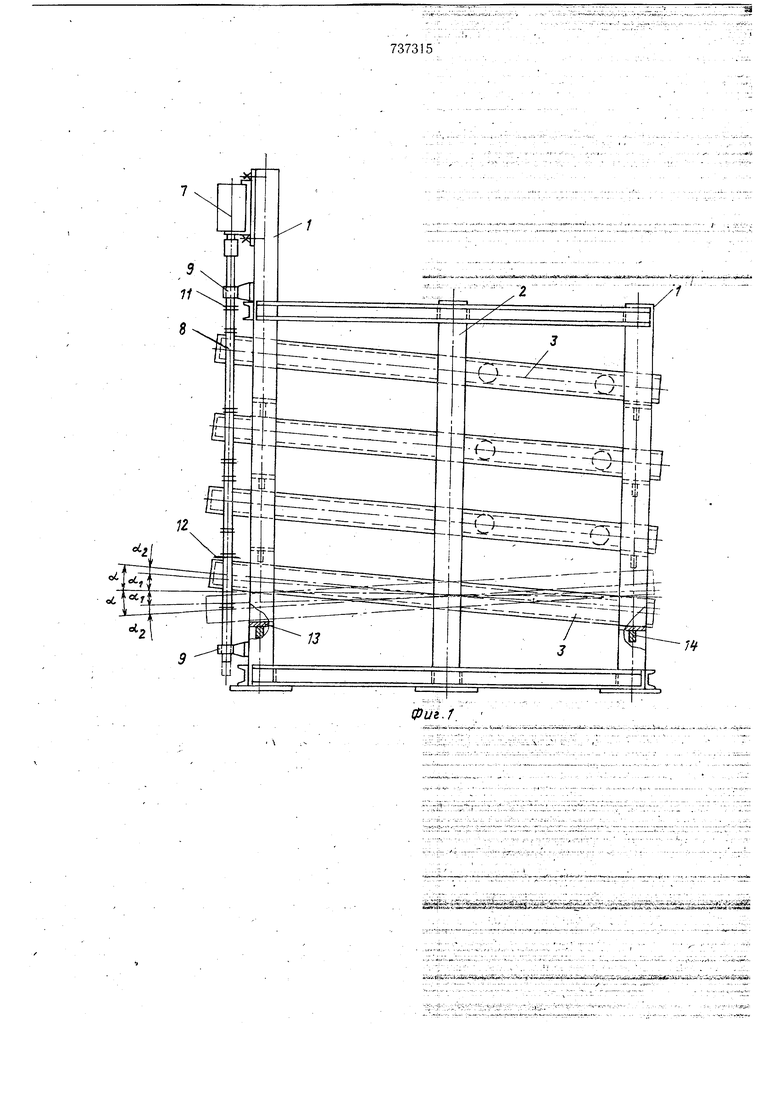
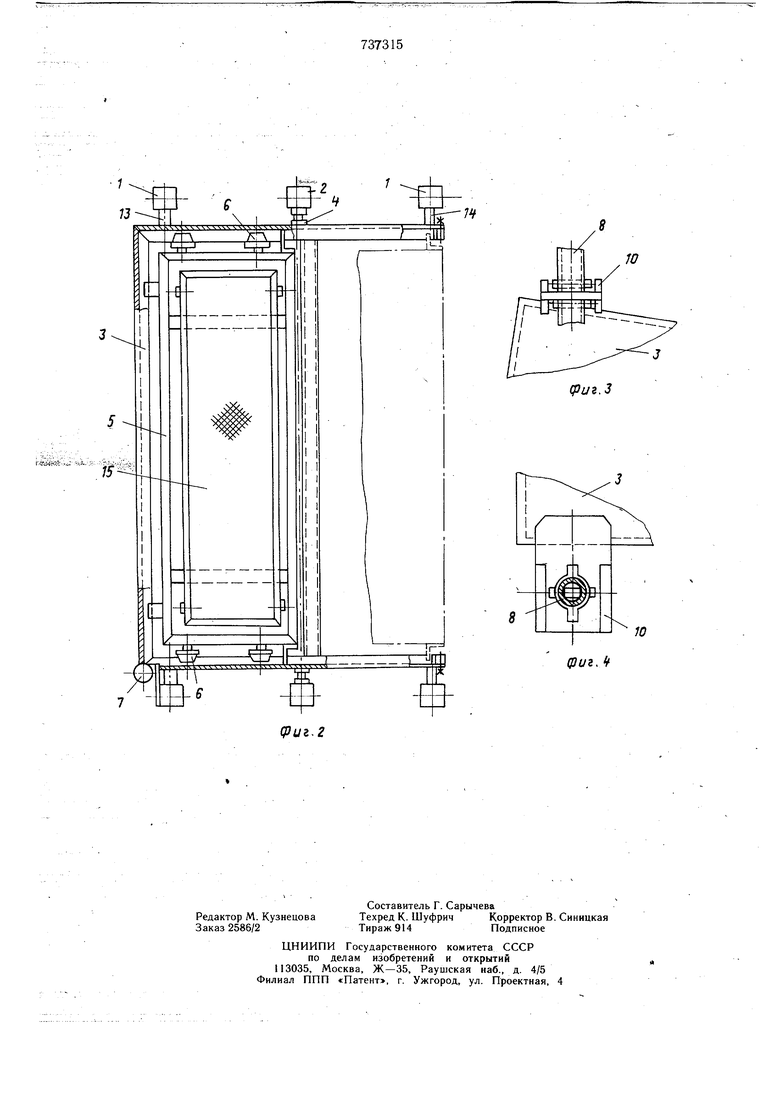
На фиг. 1 изображен стеллаж общий вид; на фиг. 2 - вид сверху на груженую полку; на фиг. 3 - положение упора перед загрузкой; на фиг. 4 - то же, вид в плане.
Стеллаж состоит из каркаса, образованного стойками - боковыми 1 и центральными 2, рам 3, поворотно установленных на
(54) СТЕЛЛАЖ
цапфах 4 в йтойках 2, и расположенных на рамах 3 выдвижных полок 5 с катками 6. На одной из стоек 1 установлены пневмоцилиндр 7 и связанная с его штоком вертикальная тяга 8, расположенная в направляющих втулках 9 иснабженная передвижным упором 10. Для размещения упора 10 на тяге имеются гн езда: нейтральное 11 и рабочие 12. На стойках 1 имеются опоры 13 и 14, на которые ложатся рамы 3 в крайних положениях. Места расположения ра. бочих гнезд 12 на тяге 8 выбираются конст10руктивно и должны обеспечивать постанов-, ку ynojja 10 над верхней кромкой рамы 3 при верхнем крайнем положении порщня пневмоцилиндра 7 и под нижней кромкой рамы 3 при нижнем крайнем положении порщ15ня цилиндра при условии, что рама опира WcTi B nepB- oMслучае на опору 14, а во втором случаена оТГору 13, располагаясь под углом сСк горизонтали. Груз устанавливается или непосредственно на. полки 5, или на поддоны J5. Рамы 3 имеют П-образную в
20 , ФормуГчто пЖволяёГ WBbiivi KpaiHOM сверху любую свободную полку стеллажа, установленную на незамкнутом конце рамы. Предлагаемый стеллаж работает следующим образом. Стеллаж имеет (фиг. 1, 2) справа зону загрузки, слева зону хранения груза. Для .подачи полки 5 из зоны загрузки в зону хранения исходным положением поршня пневмоцилиндра 7 является крайнее верхнее положение. Упор 10 путем .поворота на 90° выводится из гнезда 11, в котором постоянно находится в нерабочем положении, перемещается по тяге 8 до соответствующего рабочего гнезда 12 над верхней кромкой рамы, на которой установлена перемещаемая полка, и фиксируется в этом гнезде. Для перемещения полки порщню цилиндра дается рабочий ход вниз, тяга 8 перемещается, и упор10 поворачивает раму на угол (/+ о((). Полка 5 вкатывается по раме 3 в зону хранения груза и своим весом доворачивает раму на угол /2. до установки рамы на опору 13. Для подачи любой из полок на разгрузку (загрузку) поршень цилиндра 7 устанавливается в крайнее нижнее положение, упор 10 устаналивается в рабочее гнездо 12 под нижней кромкой соответствующей рамы 3 и фиксируется в этом гнезде. Порщню цилиндра дается рабочий ход вверх, тяга 8 с помощью упора 10 поворачивает раму с полкой на угол (of+ofi), полка выкатывается в зону загрузки и доворачивает своим весом раму на угол «/г, до установки рамы на опору 14. При этом тяга 8 разгружается от веса рамы и полки с грузом.
737315 Достаточный угол для гравитационного гтеремещения полок на подщипниках качения создается, например, при о(3,5°, oii 2,5°, . Таким образом, предложенное техническое решение за счет использования гравиационного перемещения полок позволяет создатьстеллаж более простой конструкции уменьщенной металлоемкостью и стоимостью. Формула изобретения 1. Стеллаж, содержащий каркас, связанный с расположенными в несколько ярусов подвижными в горизонтальной плоскости полками, отличающийся тем, что, с целью упрощения конструкции, на каркасе под полками закреплены качающиеся от привода П-образные рамы,на которых установлены упомянутые полки, при этом рамы связаны с приводом посредством тяги, на которой расположены упоры, взаимодействующие с упомянутыми ра.мами. 2. Стеллаж по п. 1, отличающийся тем, то привод поворота рам содержит силоой цилиндр. Источники информации, принятые во вни.мание при экспертизе 1. Авторское свидетельство СССР № 521189, кл. В 65 G 1/02, 1973 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоярусный стеллаж для хранения длинномерных изделий | 1988 |
|
SU1655869A1 |
| Устройство для загрузки и разгрузкиСТЕллАжЕй | 1979 |
|
SU819017A1 |
| Тележка для перевозки различных стандартных изделий, напр. формового хлеба | 1934 |
|
SU43342A1 |
| Механизированный стеллаж | 1982 |
|
SU1031852A1 |
| АВТОМАТИЗИРОВАННОЕ МНОГОЯРУСНОЕ УСТРОЙСТВО | 1993 |
|
RU2043277C1 |
| Многоярусный стеллаж | 1980 |
|
SU918190A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| СТЕЛЛАЖ СБОРНО-РАЗБОРНЫЙ МЕТАЛЛИЧЕСКИЙ И СТАБИЛИЗАТОР ПОЛОЖЕНИЯ БАЛОК СТЕЛЛАЖА (ВАРИАНТЫ) | 2022 |
|
RU2783952C1 |
| МНОГОЯРУСНЫЙ СТЕЛЛАЖ | 1991 |
|
RU2021960C1 |
| Стеллаж | 1981 |
|
SU1006322A1 |
SSaR
W
(риг.З
фиг,
