со
00 СП
ьо
Изобретение относится к складскому оборудованию, в частности к устройствам для складирования и накопления различного рода грузов на машиностроительных предприятиях.
Известен механизированный стеллаж, содержащий корпус с несущими кронщтейнами, на которых установлены съемные полки, и подъемно-опускные каретки, связанные с приводом их перемещения и оснащенные захватами, взаимодействующими с полками 1.
Однако стеллаж громоздок и занимает больщую площадь.
Известен также механизированный стеллаж, содержащий корпус, на внутренней стороне боковых стенок которого закреплены несущие кронщтейны для съемных полок и подъемно-опускные от привода каретки, расположенные с боковых сторон полок и снабженные взаимодействующими с выступами, выполненными на боковых сторонах полок, телескопическими захватами, неподвижное звено каждого из которых смонтировано на раме соответствующей каретки, а подвижное и грузонесущее звенья связаны с неподвижным звеном 2.
Однако в данном стеллаже имеется опасность сброса полки с захватом в случае ошибочной ее установки в занятый ярус.
Кроме того, при неаккуратном производстве погрузочно-разгрузочных работ и недосмотру обслуживающего персонала полка может быть смещена от 1осительно захватов и опрокинута в момент установки ее на кронщтейны.
Цель изобретения - повыщение удобства эксплуатации.
Поставленная цель достигается тем, что в механизированном стеллаже, содержащем корпус, на внутренней стороне боковых стенок которого закреплены несущие кронщтейны для съемных полок и подъемно-опускные от привода каретки, рсположенные с боковых сторон полок и снабженные взаимодействующими с выступами, выполненными на боковых сторонах полок, телескопическими захватами, неподвижное звено каждого из которых смонтировано на раме соответствующей каретки, а подвижные промежуточное и грузонесущее звенья связаны с упомянутым неподвижным звеном, захваты снабжены замками для фиксации выступов полок, каждый из которых смонтирован на грузонесущем звене с возможностью перемещения относительно него, при этом на промежуточном звене закреплены упоры; а на замках выступы для взаимодействия с этими упорами.
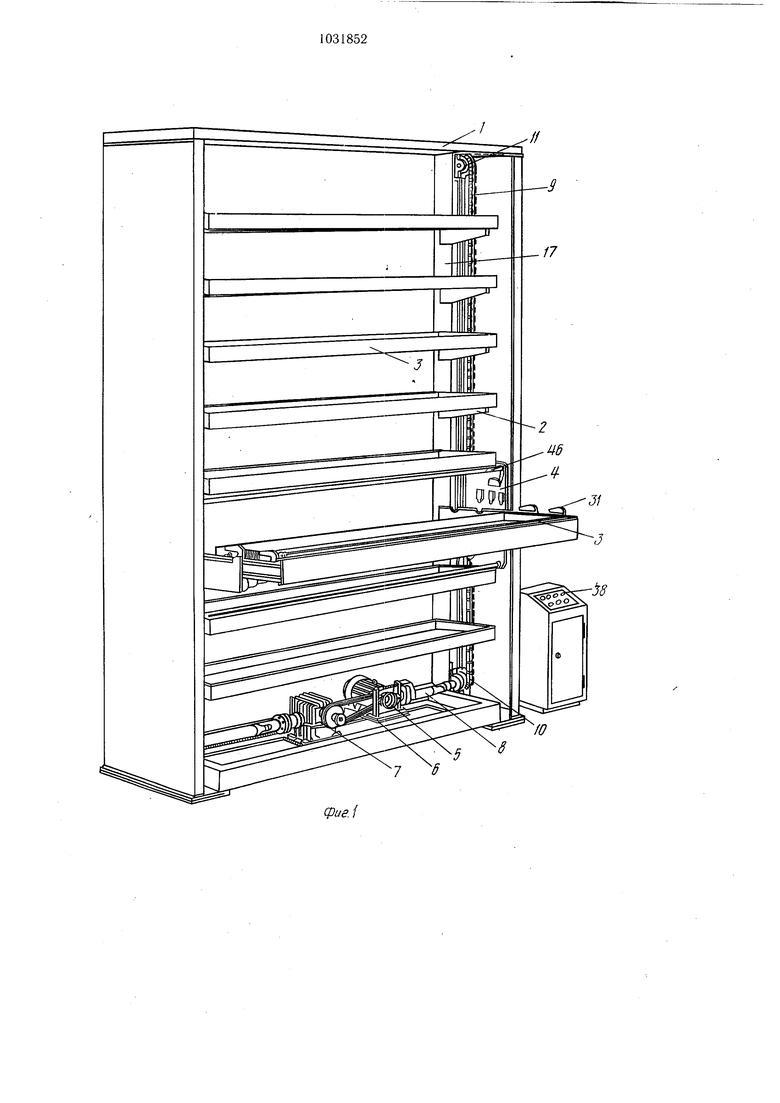
На фиг. 1 изображен механизированный стеллаж, общий вид; на фиг. 2 - вид на стеллаж с внутренней стороны, в момент перемещения подъемно-опускной каретки вверх; на фиг. 3 - то же, в момент съема одной из полок; на фиг; 4 - то же, в момент выдвижения полки за пределы стеллажа и опускания ее на уровень загрузки или разгрузки; на фиг. 5 - разрез А-А на фиг. 2; на фиг. 6 - разрез Б-Б на фиг. 3; на фиг. 7 - разрез В-В на фиг. 4;
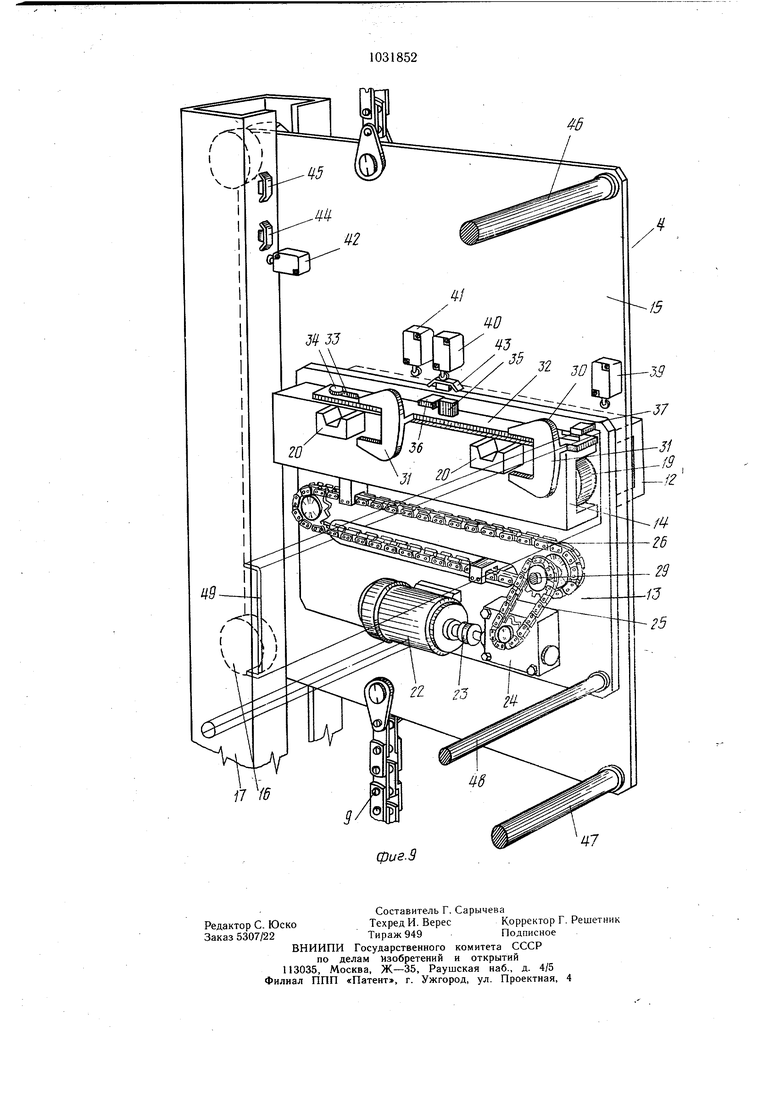
на фиг. 8 - разрез Г-Г на фиг. 3; на фиг. 9 - вид с внутренней стороны на подъемно-опускную каретку.
В корпусе 1 механизированного стеллажа размещены несущие кронщтейны 2, на которых установлены съемные грузонесущие полки 3, и подъемно-опускные каретки 4, связанные с приводом их перемещения. Привод перемещения кареток образован электродвигателем 5, клиноременной передачей 6, редуктором 7, валами 8 и вертикальными цепями 9, огибающими приводные 10 и холостые И звездочки.
Подъемно-опускные камеры 4 расположены с боковых сторон полок 3 по их ширине и оборудованы выдвижными захватами для полок. Каждый захват имеет неподвижное 12, среднее 13 и подвижное 14 звенья. Каждая каретка 4 образована несущей плитой 15 с катками 16, подвижно ус-, тановленными в направляющей 17, жестко закрепленными на корпусе 1 с соответствующей стороны полки 3. Несущая плита каж.5 дои каретки прикреплена к одной ветви соответствующей цепи 9.
Неподвижное звено 12 каждого захвата закреплено на несущей плите 15 каретки 4. Среднее звено 13 установлено с возможностью перемещения на неподвижном звене 12 посредством роликов 18. Звено 14 подвижно смонтировано на среднем звене 13 посредством роликов 19. На подвижных звеньях 14 захватов имеются седла 20, предназначенные для взаимодействия с цапфами 21 полок 3.
5 Захваты оснащены механизмами их выдвижения, смонтированными на их средних звеньях 13. Каждый механизм-выдвижения образован электродвигателем 22, муф той 23, редуктором 24, цепной передачей 25 и цепной передачей 26, ветви цепи которой соединены с подвижным звеном 14 захвата бобыщкой 27 и с несущей плитой 15 каретки бобышкой 28.
Для обеспечения синхронной работы захватов их механизмы выдвижения сблоки,5 рованы общим валом 29.
На подвижных звеньях 14 захватов с возможностью ограниченного перемещения смонтированы замки 30, предназначенные для запирания полки на захватах в их выдвинутом положении и отпирания полки в
0 убранном положении захватов.
Каждый замок образован С-образными запорными элементами 31, жестко соединенными пластиной 32, выполненной с прорезями 33, в которые входят шпильки 34, закрепленные на подвижном звене 14 захвата. На пластине 32 имеется выступ 35, предназначенный для взаимодействия с упорами 36 и 27, закрепленными на среднем звене 13 захвата. Управление приводом перемещения подъемно-опускных каретокИ механизмами выдвижения захватов осуществляется с пульта 38 управления посредством электросхемы, в состав которой входят конечные выключатели 39-42, закрепленные на несущей плите 15 каретки, и линейки 43-45, предназначенные для взаимодействия с указанными конечными выключателями. Линейка 43 установлена на среднем Звене 13 захвата, а линейки 44 и 45 - на направляющей 1Z Для обеспечения жесткости конструкции несущие плиты 15 кареток соединены между собой жесткими тягами 46 и 47, средние звенья 13 захватов - жесткой тягой 48, а подвижные звенья 14 соединены балкой 49. Механизированный стеллаж действует следующим образом. Исходное состояние стеллажа соответ,ствует крайнему нижнему расположению подъемно-опускных кареток 4. С пульта управления 38 задается программа подачи требуемой полки к месту ее загрузки или разгрузки. Включается привод перемещения подъемно-опускных кареток. Каретки 4 перемещаются вверх, а конечный выключатель 42 нажимается линейнами 44 и 45. В районе заданного яруса линейка 44 нажимает на конечный выключатель 42, который включает электродвигатели 22 механизмов выдвижения захватов полок Подвижные звенья 14 захватов полок перемещаются внутрь корпуса стеллажа до совмещения, в пространстве между полками, седел 20 с цапфами 21 полок 3. Остановка подвижных звеньев 14: происходит за счет отключения электродвигателей 22 механизмов выдвижения захватов при нажатии линейки 43 на конечный выключатель 41. При дальнейшем перемещении вверх происходит контакт седел 20 с цайфами 21 и съем полок 3 с кронштейнов 2. При подъеме полок 3 над, кронштейнами 2 на некоторую высоту подъем кареток 4 прекращается вследствие нажатия линейки 44 на конечный выключатель 42 и отключения привода перемещения кареток.Одновременно с этим включаются механизмы выдвижения захватов полки, и захваты вместе с полкой выдвигаются наружу из корпуса стеллажа. В процессе выдвижения захватов происходит соприкосновение выступов 35 с упорами 37. В этот момент пластины 32 приобретают меньшую скорость, так как упоры 37 связаны со средними звеньями 13, а седла 20 с цапфами 21 продолжают двигаться с больщей скоростью и входят в С-образные запорные элементы 31. В конце хода подвижных звеньев 14 С-образные запорные элементы 31 полностью охватывают цапфы 21 с седлами 20, а пластины 23 совершают ограниченное перемещение относительно звеньев 14 в пределах длины прорезей 33. Таким образом происходит запирание полки 3 на захватах. При максимальном выдвижении захватов электродвигатели выключаются конечным выключателем 39 с нажатием на него линейки 35. После чего вновь включается привод перемещения кареток 4 и они опускаются до нижнего уровня удобного для загрузки или разгрузки полки. На нижнем уровне привод перемещения кареток 4 отключается с помощью конечного выключателя. Для установки полки 3 на прежнее место на пульте управлейия нажимается соответствующая кнопка. Установка полки 3 на свое место происходит в обратном порядке. В момент установки полки 3 на кронщтейны 2 подвижные звенья 14 захватов двигаются в обратном направлении, внутрь корпуса стеллажа. В конце их движения выступы 35 касаются упоров 36, и пластины 32 с С-образными запорными элементами 31 замедляют свой ход, а седла 20 выходят из С-образных запорных элементов 31. Таким образом происходит отпирание полки. При нажатии линейки 43 на. конечный выключатель 41 электродвигатели 22 механизмов выдвижения захватов отключаются и движение захватов прекращается. Одновременно с этим включается привод перемещения кареток 4 и они двигаются вниз. При движении кареток 4 вниз происходит перестановка полки с захватов на кронштейны 2.-В процессе опускания кареток 4 в районе низлежащего яруса седла 20 смещаются относительно цапф 21 полок во внешнюю сторону стеллажа, обеспечивая тем самым беспрепятственное перемещение кареток по всей вьюоте стеллажа. Смещение седел 20 осуществляется вследствие включения электродвигателей 22 механизмов выдвижения захватов в момент касания линейки 44 конечного выключателя 42 и отключения его при касании линейки 43 конечного выключателя 40. В крайней нижней точке каретки 4 останавливаются с помощью конечного выключателя, занимая исходное положение. Применение предлагаемого стеллажа позволило улучшить условия труда и технику безопасности обслуживающих рабочих на погрузочно-разгрузочных работах, а также создает благоприятные условия для автоматизации и дистанционного управления такими стеллажами с использованием их в технологических линиях машиностроительных предприятий, т. е. повысить удобство эксплуатации.
//
/x /x x :sS9: v%6
&
cpue.4
.-Л11/
фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| Механизированный стеллаж | 1986 |
|
SU1382766A1 |
| Многоярусный механизированный стеллаж | 1987 |
|
SU1491769A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |




МЕХАНИЗИРОВАННЫЙ СТЕЛЛАЖ, содержащий корпус, на внутренней стороне боковых стенок которого закреплены несушие кронштейны для съемных полок и подъемно-опускные от привода каретки, расположенные с боковых сторон полок и снабженные взаимодействуюшими с выступами, выполненными на боковых сторонах полок, телескопическими захватами, неподвижное звено каждогоиз которых смонтировано на раме соответствуюш.ей каретки, а подвижные промежуточное и грузонесушее звенья связаны с упомянутым неподвижным звеном, отличающийся тем, что, с целью повышения удобства эксплуатации, захваты снабжены замками для фиксации выступов полок, каждый из которых смонтирован на грузонесуш,ем звене с возможностью перемещения относительно него, при этом на промежуточном звене закреплены упоры, а на замках выступы для взаимодействия с этими упорами. (Л с
1И1
iA/1//
IMI
B-6
&
./
IHI
/7
Ш
:/
ff ./
-0
2i
Сриг.7
J5
Cpuff.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3063769, кл | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
