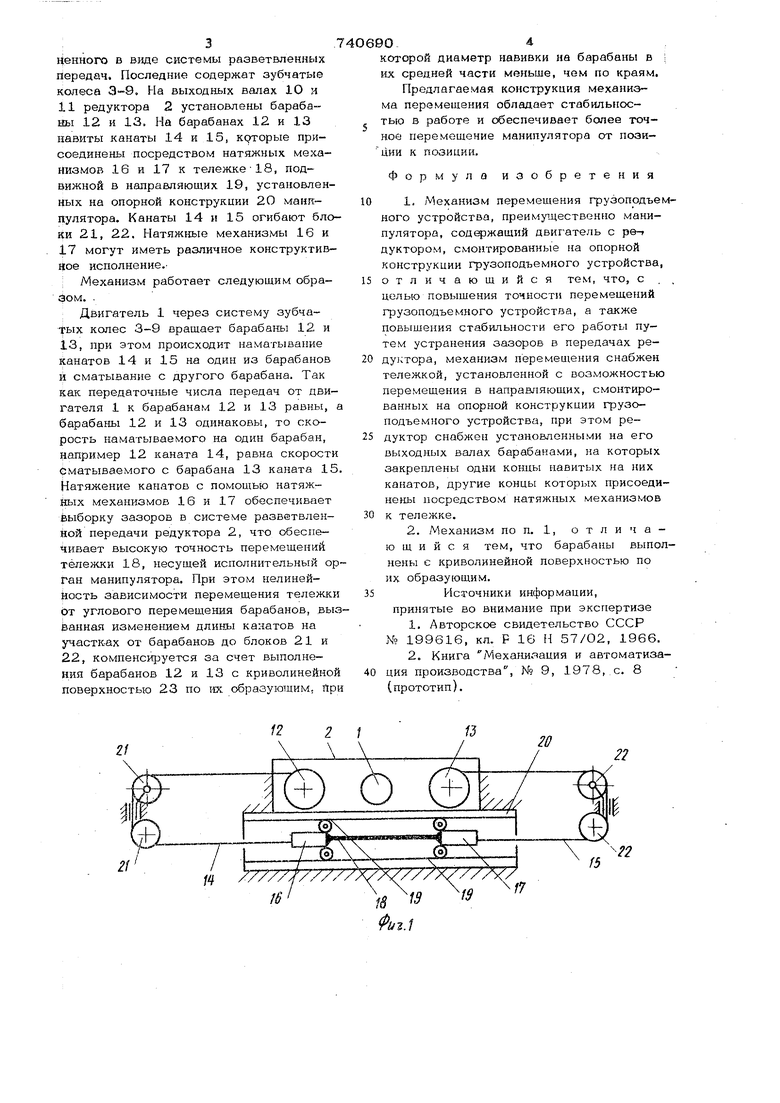
Изобретение относится к области подъемно-транспортного машиностроения а именно к механизмам перемещения грузоподъемных устройств, преимущественно манипуляторов. Известен механизм перемещения, используемый для вращения антенны, который содержит двигатель и два параллельных ряда замкнутых передач, связанных торсионом . Однако такой механизм сложен и использовать его на манипуляторе нецелесообразно. Наиболее близким к изобретению является механизм перемещения манипулятора, содержащий двигатель с редуктором, смонтированные на оперной конструкции ef-o 2. Оцнако такой механиз перемещения обладает повыщенным мер вым ходом, обусловленным в зацеплении, снижающими точность перемещений манипулятора и уменьшающими устойчивость работы его следящего привода. Целью изобретения является повыще- ние точности перемещений и повышение стабильности работы грузоподъемного устройства путем устранения зазоров в передачах редуктора. Цель достигается тем, что механизм, перемещения снабжен тележкой, установленной с возможностью перемещения в направляющих, смонтированных на опорной конструкции грузоподъемного устройства, при этом редуктор снабжен установленными на его выходных валах барабанами, на которых закреплены одни концы навитых на них канатов, другие . концы которых присоединены посредством натяжных механизмов к тележке, при этом барабаны выполнены с криволинейной поверхностью по их образующим. На фиг. 1 изображён предлагаемый механизм, общий вид; на фиг. 2 - то же, вид сверху. Механизм перемещения грузоподъемного устройства манипулятора состоит из двигателя 1 и редуктора 2, выполценного в виде системы разветвленных передач. Последние содержат зубчатые колеса Э-9, На выходных валах 10 и 11 редуктора 2 установлены барабаны 12 и 13. На барабанах 12 и 13 навиты канаты 14 и 15, которые присоединены посредством натяжных механизмов 16 и 17 к тележке18, подвижной в направляющих 19, установленных на опорной конструкции 20 манппулятора. Канаты 14 и 15 огибают блоки 21, 22. Натяжные механизмы 16 и 17 могут иметь различное конструктивное исполнение.
; Механизм работает следующим образом. .
Двигатель 1 через систему зубчатых колес 3-9 вращает барабаны 12, и 13, при этом происходит наматывание канатов 14 и 15 на один из барабанов и сматывание с другого барабана. Так как передаточные числа передач от двигателя 1 к барабанам 12 и 13 равны, а барабаны 12 и 13 одинаковы, то скорость наматываемого на один барабан, например 12 каната 14, равна скорости Сматываемого с барабана 13 каната 15. Натяжение канатов с помощью натяжных механизмов 16 и 17 обеспечивает выборку зазоров в системе разветвленЙой передачи редуктора 2, что обеспечивает высокую точность перемещений тележки 18, несущей исполнительный орган манипулятора. При этом нелинейkocTb зависимости перемещения тележки От углового перемещения барабанов, вызёанная изменением длины канатов на участках от барабанов до блоков 21 и 22, компенсируется за счет выполнения барабанов 12 и 13 с криволинейной поверхностью 23 по tec образующим, при
ко1Орой диаметр навивки на барабаны в их средней части меньше, чем по краям,
Предлагаемая конструкция механизма перемещения обладает стабильностью в работе и обеспечивает более точное перемещение манипулятора от позиции к позиции.
Формула изобретения
1, Механизм перемещения грузоподъемного устройства, преимущественно манипулятора, сод(жащий двигатель с ре-г дуктором, смонтированные на опорной конструкции грузоподъемного устройства,
отличающийся тем, что, с целью повышения точности перемещений грузоподъемного устройства, а также повышения стабильности его работы путем устранения зазоров в передачах редуктора, механизм перемещения снабжен тележкой, установленной с возможностью перемещения в направляющих, смонтированных на опорной конструкции грузоподъемного устройства, при этом редуктор снабжен установленными на его выходных валах барабанами, на которых закреплены одни концы навитых на них канатов, другие концы которых присоединены посредством натяжных механизмов
к тележке.
2. Механизм по п. 1, отличающийся тем, что барабаны выполнены с криволинейной поверхностью по их образувощим.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР N° 199616, кл. Р 16 И 57/02, 1966.
2.Книга Механизация и автоматизадня производства, №9, 1978,, с. 8
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| НАТЯЖНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2002 |
|
RU2214355C1 |
| Механизм поступательного перемещения | 1978 |
|
SU740691A1 |
| Устройство для навивки кабеля | 1990 |
|
SU1745657A1 |
| Устройство для натяжения ленты конвейера отвалообразователя | 2023 |
|
RU2805889C1 |
| ДВУХБАРАБАННАЯ ЛЕБЕДКА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ ГРУЗОВОЙ ТЕЛЕЖКИ БАШЕННОГО КРАНА | 2005 |
|
RU2297973C1 |
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |
| Устройство для транспортировки конвейерной ленты | 1979 |
|
SU870268A1 |
| ШАРНИРНЫЙ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728850C1 |
| Стенд для испытаний рабочих органов сельскохозяйственных машин | 1988 |
|
SU1629779A1 |

