I
Изобретение относится к области автоматического управпения створками, преимущественно створками проходческого подъема.
Известно устройство аля автоматического управления створками нулевой и разгрузочных площадок проходческого подъема, содержацее блок контроля местоположения бадьи на разгрузочной площадке и блок дистанционного управления, связанный с исполнительным механизмом створки нулевой площадки, задатчиком и блоком контроля положения створки разгрузочной площадки l .
Недостатко 1 данного устройства является малое быстродействие при открывании и закрывании створок.
Цель изобретения - повышение 6bicTpckдействия при открывании и закрывании створок.
Указанная цол1 достигается тем, что устройство имоот блок контроля направле- ння движения бпд,и,блок контроля положения створки нуловои плошацки, блок
контроля фу жционирования створки нулевой площадки, блок программного управления, блок сравнения, блок информации, блок индикации, причем выход блока сравнения связан с первым входом блока программного управления, а его вход соединен с блоками -контроля местоположения бадьи, направления движения бадьи, функционирования створки и задатчиком, один выход которого через блок информации
10 связан с блоком индикации, а другой выход подключен к блоку дистанционного управления, причем второй вход блока гфорраммного управления связан с блоком контроля местоположения бадьи, а его ход подключен к задатчику.
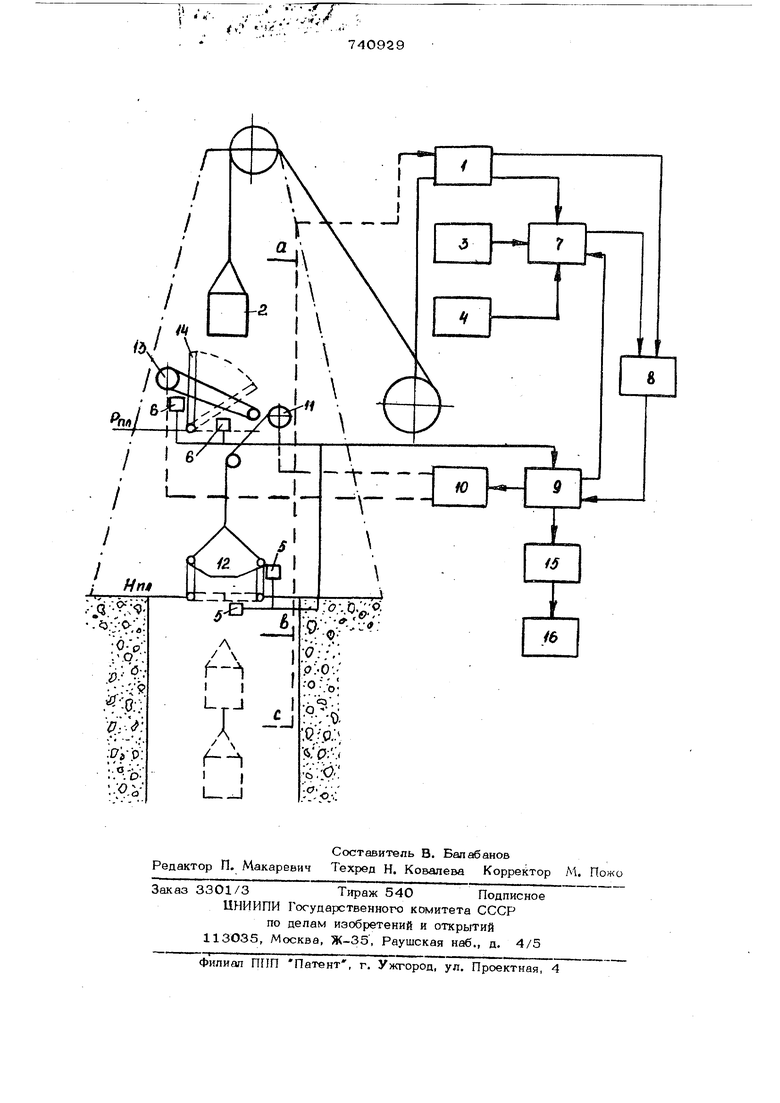
На чертеже изображена б пoк-cxeмa устройства для автоматического управления створками, преимущественно створками проходческого, подъема.
20
Предлагаемое устройство содержит блок 1 контроля о местоположении бадьи 2 в отводе-копре, блок 3 контроля о направлении движения бадьи , блок 4 функци3740онирования створки, блок 5 контроля о положении створки нулевой площадки, блок 6 контроля о положенш1 створки разгрузочной площадки, блок 7 ср шнения, блок 8 программтюго управления, задатчик 9 программ, блок 10 диста1щио1шого управления, исполнительный механизм 11 створки 12 нулевой площадки, исполнительный механизм 13 створки 14 разгрузочной площадки, блок 15 информации и блок 16 индикации положения ляд и бадьи в копре. Блок 1 контроля состоит из блоков этажных переключателей аппарата задания и контроля хода подъемной машины, механически связанного с валом барабана подъемной машины. Контакты этажных переключателей электрически соединены с блоком 7 сравнения и блоком 8 программного управления. Блок 3 контроля состо ит из блок-контактов реверсора электропривода, а блок 4 состоит из контактов реле предохранительного тормоза подъемной машины. Эти блоки (3 и 4) электрически связаны с блоком 7 сравнения, выполненного на позиционных реле положения бадьи в стволе-копре и направления ее движения, установленного а здании подъем ной машины, Блок 8 программного управления выполнен на шаговых Я.командных реле и электрически связан с блоком 7 сравнения и блоком 1 контроля, встроен в пульт управления створками, установленный на нулевой площадке. На этом пульте размещены задатчик 9, программ, выполненный на кулачковых переключателях и позиционных репе положения створки, и блок 15 информации положения бадьи-створок, который электрически связан с блоком 16 индикации, размещенной на пульте управле ния подъемней машины. Блок 15 информации представляет собой комплект звуковой и световой сигнальной аппаратуры, размещен на пульте управления створками и предназначен для подачи текущей информации о местоположении бабьи в копре и о предстоящих операциях, связанных с управлением створок, например, открыть или закрыть створки нулевой площадки. Блоками 5 и 6 контроля служат бес-, контактные путевые датчики, фиксирующие два положения створок и смонтированные соответственно на створках нулевой и раз грузочной площадок копра. Блок 10 аиста1шионного управления выполнен на магнитных пускателях и пред назначен для включения электрических приводов НС полните лыюго механизма 11 створки 12 и ИСПОП11ИТ€1П111ОТО МОХПНИЗМа 13 створки 14. Устройство работает слоцующнм образом. Цикл автоматического режима управления створкакт копра начинается с момента опускания бадьи в ство/к Предварительно оператор при остановленной бадье, находящейся над раскрытыми створками нулевой площадки, задатчиком 9 программ устанавливает соответствующий режим управления створками,- например Автоматический груз, что соответствует работе проходческого подъема по выдаче породы в бадьях из забоя ствола на поверхность и последующей ее разгрузки. При этом на блоке 15 загораются сигнальные лампочки положения переключателей, соответствующие з&данному режиму управления створками и работы проходческого подъеПо сигналу оператора машинист подъема опускает бадью в ствол. С момента опускания бадьи в ствол начинает поступать информация от блоков 1,3,5 в блок 7, где происходит сравнение сигналов о напр)авпении движения и местонахождении бадьи в стволе с положением створки нулевой площадки. При совпадении определенных положений створки нулевой площадки, местонахождения и направлении .движения бадьи в стволе из блока 7 сравнения поступает предварительный командный сигнал в блок 8 программного управления и через задатчик 9 программ в блок 15. Так при достижении бадьей глубины ствола, соответствующей отметке -6 на информаторе загорается сигнальная лампочка Открыть створки и воспроизводится звуковой сигнал. Одновременно в блоке 8 программногоуправления происходит прием, преобразование, регистрация предварительного командного сигнала и в преобразованном виде воспроизводится командным реле исполнительный сигнал Закрыть створки , который через задатчьк 9 программ поступает в блок 10 дистанционного управления и включает магнитный пускатель исполнительного механизма 11 створки 12, которай начнет закрыват1ся. После полного закрытия створок на блоке 15 снимается воспроизведение командного сигнала Закрыть створкиН л и отражается изменение положения створки лампочка Створка открыта гаснет и загорается лампочка Створка закрыта. При достижении опускающейся бадьей глубины отвода, соответствующей отметки сив случае незакрьтгия створки Я «,. блока 7 сравнения-подается сигнал на аварийную остановку подъемной машины с включением предохранительного торможения. В этом случае на блоке 15 продолжает гореть лампочка Закрыть створку Н.. , указывая на причину, вызвавшую остановку подъемной машины. При подъеме из забоя ствола груженой бадьи на поверхность и достижении глубины ствола, соответствующей отметке С из блока 7 сравнения в блок 8 и блок 15 подается предварительный командный скгнал Открыть створку Н Аналогично выше описанному на блоке 15 всспроизводится лампочкой и звуком предварительны командный сигнал Открыть створку Нр| а из блока 8 через задатчик 9 поступает в блок 10 исполнительный командный сиг.нал Открыть створки Н, , который включает магнитный пускатель исполни..тельного механизма 11 створки 12, и последняя начнет открываться. Поспе пол ного раскрытия створок Hf на информаторе снимается воспроизведение предварительного сигнала Открыть створки Н, прекращается подача звукового и светового сигналов и происходит отражение изменения положения створки, лампочка Створ ка Нр закрыта гаснет и загорается лампочка Створка открыта. В случае нераскрытия створок H,-, при достижении поднимающейся бадьей отметки из блока 7 сравнения подаетея сигнал на аварийную остановку подъемной машины В этом случае на блоке 15 также будет действовать предварительный командный сигнал Открыть створку f , оповещая оператора о причине вызвавшей аварийную остановку подъемной машины, При выходе бадьи на разгрузочную площадку копра и достижении ею отметки d , машинист останавливает бадью, а из блока 1 подается предварительный командный сигнал на блок 8, из которого на блок 10 выдается исполнительная команда Зак рыть створки нулевой и разгрузочной площадок. Пуска тел и блока 10 включают исполнительные механизмы 11 и 13 створок 12 и 14 и последние закрываются. Как на информато.ре, ина панели индикации отражается изменение положений обеих створок копра. После закрытия створок нулэвой и разгрузочной площадок бадью опускают на разгрузочную створку и она автоматически разгру . При этом из источника 1 на блок Р вторично поступпот сигнал, от которото слелуйт в блок 1О команпо Створки нулевой н раэг)уз)чно(1 плош,а749 После разгрузки ба.док не открывать дью поднимают на высоту, соответствующую отметке CJ и останавливают. При этом из блока 1 информации в третий раз подается сигнал на блок 8, от которого в блок 10 поступает команда Открыть вначале створку разгрузочной площадки, а затем створку нулевой площадки. Когда обе створки раскроются и бадью начнут опускать в ствол, то из блока 1 в четвертый раз подается командный сигнал в блок 8 программного управления, исполнительный командный сигнал осуществпяет приведение аппаратуры блока в исходное полохоние, так как происходит сброс отсчета командных сигналов, после чего устройство принимает исходное положение для ос тцествлвния последующего цикла автоматического управления створками нулевой и разгрузочной площадок копра. Формула изобретения Устройство для автоматического управления створками нулевой и разгрузочной площадок проходческого подъема, содержащее блок контроля местоположения бадьи на разгрузочной площадке и блок дистанционного управления, связанный с исполнительным .механизмом створки нулевой площадки, задатчиком и блоком контроля положения створки разгрузочной площадки, отличающееся тем, что, с целью повышения быстродействия при открывании и закрывании створок, оно имеет блок контроля направления движения бадьи блок контроля положения створки нулевой площадки, блок контроля функционирования створки нулевой площадки, блое; программного управления, блок сравнения, блок информации, блок индикации, причем выход блока сравнения связан с первым входом блока программного управления, а его вход соединен с блоками контроля местоположения бадьи, направления движения бадьи, функционирования створки и задатчиком, один выход которого через блок информации, связан с блоком индикации, а другой выход подключен к блоку дистанционного управления, причем второй вход блока программного управления связан с блоком контроля местоположения бадьи, а его выход подключен к задатчику. Источники информации, принятые во внимание при экспертизе 1. Автоматизированная система управления Лядами разгрузки проходческих бадей. Экспресс-информация ЦЦИИЭИ, Опыт механизации монтажных и горнопроходческих работ в шахтном строителкгтве, М., Уголь, 1973.
:. - -f / ,
. ..... . . - /f
740929
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство сигнализации и блокировки ляд на проходческой подъемной установке | 1978 |
|
SU751766A1 |
| НАДСТВОЛЬНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2027009C1 |
| Устройство для программного управления перемещением объекта | 1981 |
|
SU957170A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОХОДКИ И ЭКСПЛУАТАЦИИ ШАХТНЫХ ВЕРТИКАЛЬНЫХ СТВОЛОВ | 1997 |
|
RU2120013C1 |
| Разгрузочное устройство проходческого копра стволового шахтного подъемника | 1982 |
|
SU1027396A1 |
| СПОСОБ РАЗГРУЗКИ ГОРНОЙ МАССЫ | 2004 |
|
RU2274751C2 |
| СПОСОБ МОНТАЖА МЕТАЛЛИЧЕСКОГО УКОСНОГО КОПРА С ПОДШКИВНЫМИ ПЛОЩАДКАМИ | 2016 |
|
RU2624500C1 |
| Проходческий полок для проходки горных выработок | 1983 |
|
SU1102963A1 |
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
| Устройство для разгрузки проходческих бадей | 1981 |
|
SU1030554A1 |