Изобретение относится к электротехнике и может быть использовано для управления частотно-регулируемыми электроприводами, в различных отраслях промнитениости, в частности текстильной, химической, металлургической. .
Известен способ реверса асинхронного двигателя, питаемого от преобразователя частоты путем изменения чередования фаз питающего напряжения на выходе преобразователя частоты 1 .
При торможении кинетическая энергия вращающихся частей рассеивается в роторной цепи, что приводит к повышенному нагреву электродвигателя. Кроме того, такой реверс не оптимален по быстродействию, так как эффективность работы асинхронной машины в генераторном режиме при скольжениях, больших критических, мала. Изменение чередования фаз выходного напряжения на номинальной частоте и напряжении сопровождается большими токами, что может привести к срыву коммутации преобразователя частоты.
Наиболее близок к предлагаемому способ реверса асинхронного электродвигателя, при котором первоначально
осуществляется частотное торможение, например, по линейному закону до частоты, приблизительно равной частоте скольжения, после этого производится изменение чередования ф.аз выходногр напряжения, а затем частотный пуск асинхронного электродвигателя в обратном направлении. При частотном торможении асинхронный электродви10гатель переходит в генераторный режим ввиду того, что частота статора уменьшается быстрее, чем угловая скорость ротора, и кинетическая энергия вращающихся масс не рассеивается в
15 роторе, а возвращается источнику пи-, тания,откуда она может быть возвращена в сеть,если источник питания рекуперативный или если энергия рассеяна на пассивных элементах (резисторах), .
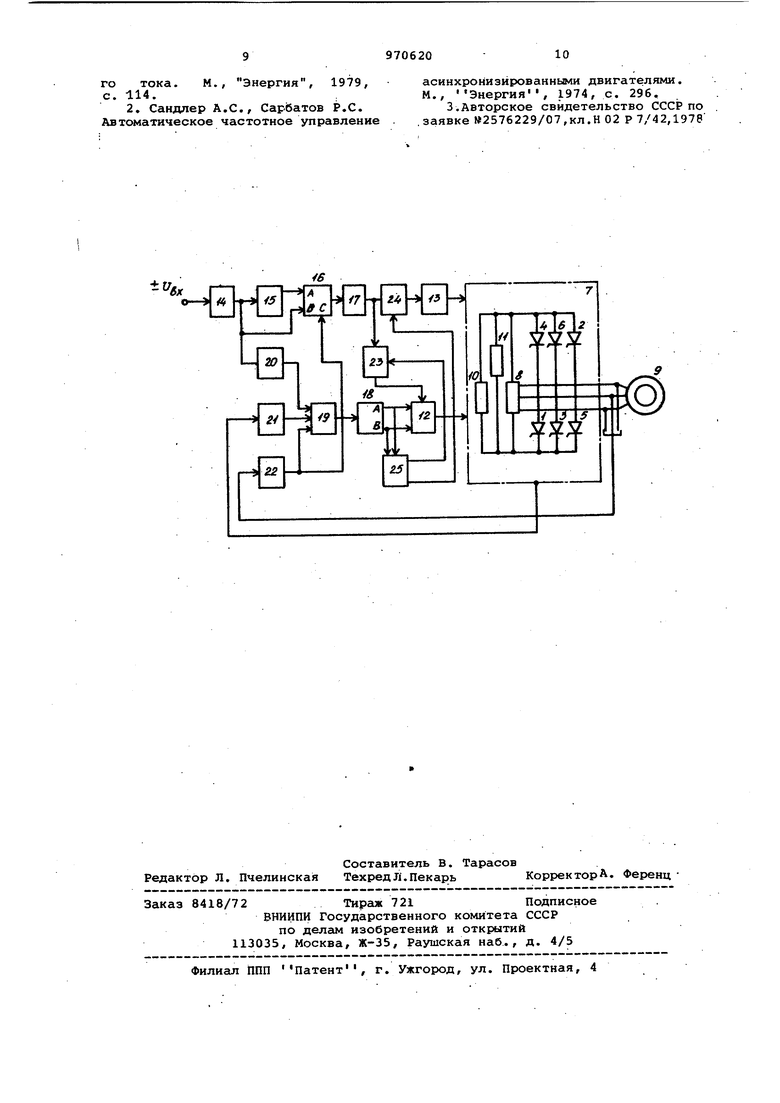
20 предусматриваемых для этого случая в источниках. Поскольку для управления электродвигателем между частотой и напряжением преобразователя поддерживается примерно линейная зависи25мость, то при снижении частоты одновременно пропорционально снижается выходное напряжение преобразователя. После снижения до частоты, приблизительно равной частоте скольжения асинхронного электродвигателя (0,5301,ОГц) изменяют чередование фаз выходного напряжения преобразователя частоты и осуществляют частотный пус асинхронного электродвигателя. В это случае броски тока и момента не превосходят двух-, трехкратных значений от номинсшьных и реверс на небольшой частоте (ниже 5 Гц) не является опас ным для электропривода 2. Недостатком известного способа ре верса электропривода является то, что вследствие несинусоидальности формы выходного напряжения преобразо вателя при реверсе и пуске электродвигателя на низкой частоте в момент после первой коммутации наблюдается отсутствие пускового момента, он появляется только при следующих коммутациях. Это объясняется увеличением времени установления потокосцеплений при низких частотах питающего напряжения асинхронного электродвигателя. Относительная длительность электромагнитного переходного процесса при реверсе асинхронного электродвигателя по мере снижения частоты возрастает и вследствие этого электромагнитный переходной процесс в асинхрон ном электродвигателе заканчивается позже механического. Таким образом, при реверсе асинхронного электродвигателя известным способом после изменения чередования фаз на выходе преобразователя частота электродвигателя начнет разгонять ся в другую сторону не раньше, чем пройдет один межкоммутационный период равный tH I Т период между двумя коммутациями;период выходной частоты, ко торый необходим для установ ления потокосцеплений асинхронного двигателя. При частоте скольжения 0,5 Гц ука занное йремя составит -(оТз i o,33.c.. Это является существенной задержкой, так как весь процесс-частотного пуска двигателя длится 1-1,5 с при номинальном токе и незначительном моменте инерции механизма Известно устройство, реализующее способ реверса асинхронного электродвигателя, которое содержит преобразователь частоты, подключенный к асинхронному электродвигателю, включающий соединенные между собой автономный инвертор, узел коммутации, регулируемый источник с фильтром, блоки регулирования частоты и напряжения , выходы которых подключены к преобразователю частоты, датчик частоты вращения,,цепь, составленную из последовательно соединенных двух усилителей, блока определения знака . аналогового сигнала и задатчика интенсивности, пороговый элемент, выхог ды которого соединены с входами блока регулирования частоты, а вход порогового элемента, через схему И связан с выходами нуль-органа, датчика коммутации и точкой соединения выхода датчика частоты вращения с входом блока выбора полярности аналогового сигнала, причем вход нуль-органа соединен с выходом первого усилителя,, вход датчика коммутаций связан с преобразователем частоты, а выход датчика частоты вращения связан с асинхронным двигателемГ З. Недостаток данного устройства повышенное время реверса из-за увеличения относительной длительности электромагнитных процессов. Цель изобретения - уменьшение времени реверса. Поставленная цель достигается тем, что согласно способу реверса асинхронного электродвигателя, подключенного к инвертору, при котором осуществляют частотное торможение до заданных минимальных значений частот и напряжений, затем изменяют порядок чередования фаз на выходе инвертора и производят пуск в обратном направлении, после изменения порядка чередования фаз на выходе инвертора кратковременно повышают частоту и напряжение на выходе инвертора до номинальной ве- личины на время не менее двух коммутаций инвертора, а затем уменьшают частоту и напряжение до минимальных величин. В устройство для осуществления способа реверса асинхронного электродвигателя введены два суммирующих блока и форсирующий блок, при этом первые входы суммирующих блоков подключены к выходу задатчика интенсивности, вторые входы суммирующих блоков подключены к выходу форсирующего блока, входы форсирующего блока подключены к точкам соединения выходов порогового элемента с входами блока регулирования частоты, выходы суммирующих блоков порознь подключены к блокам регулирования частоты и напряжения преобразователя. . На чертеже представлена блок-схема устройства, реализующего способ . реверса асинхронного электродвигателя. Устройство содержит тиристоры 1-6, образующие инверторный мост, входящий в преобразователь 7 частоты. К, выводам переменного тока инверторного моста подключен узел 8 коммутации и электродвигатель 9 переменного тока, а к выводам постоянного тока инверторного моста подключен регулируемый выпрямитель 10 и фильтр 11. Преобразователь 7 частоты может быть дополнен также другими элементами, например мостом обратных диодов в случае выполнения преобразователя частоты по схеме инвертора напряжения. Управление частотой и напряжением преобразователя 7 осуществляется с помощью блоков 12 и 13 регулирования частоты и напряжения. Управляющий сигнал подается на вход усилителя 14, который совместно со вторым усилителем 15, блоком 16 определения знака аналогового сигнала и задатчиком 17 интенсивности образует последовательную цепь. К входам блока 12 управления частотой подключены выходы ;порогового элемента 18, управляющий вход которого соединен с выходом схемы И 19. Первый вход схемы И через нуль-орган 20 соединен с выходом усилителя 14, второй вход схемы И через блок 21 отсутствия коммутации преобразователя связан с преобразователем 7 частоты, а третий вход схемы И через датчик 22 частоты вращения связан с электродвигателем переменного тока. Суммирующие блоки 23 и 24 первыми входами подключены к выходу задатчика интенсивности, а вторыми входами - к выходу форсирующего блока 25, входы которого подключены к точкам соединения выходов порогового элемента 18 с входами блока регулирования частоты, которые определяют программу работы блока 12 регулирования частоты.
Способ реверса осуществляется следующим образом.
С Подачей отрицательного сигнала управления и на вход усилителя 14 напряжения на его выходе меняет свой знак (усилитель пропорциональный инвертирующий) и изменяется по закону изменения входного сигнала. Усилитель 15.также изменяет знак выходного сигнала. .
Блок 16 определения знака аналогового сигнала выполнен управляемым и пропуска ет на вход задатчика интенсивности только одну (положительную) полярность сигнала. С момента появления сигнала задания на торможение и до момента окончания торможения сигнал с выхода блока 16 равен нулю. Это достигается связью между выходом блока 22 измерения скорости и входом С блока 16. При появлении сигнала (например, отрицательного) -Ug сигнал задания инвертируется усилителем 14 и инвертируется знак на положительный вход В, и через блок 16 поступает на вход задатчика 17 интенсивности. Отрицательный сигнал с усилителя 15, поступающий на вход А блока 16, блокируется и далее не проходит. Задатчяк интенсивности интегрирует поступающий на его вход положительный сигнал с выхода блока 16 и на его выходе происходит плавное изменение выходного сигнала с за,панньм темпом, например, по линейному закону (в общем случае закон может быть отличным от линейного, например, экспоненциальным) . Выходной сигнал задатчика 17 интенсивности поступает на первые входы суммирующих блоков 24 и 25 и с выходов указанных сумми0рующих блоков поступает на входы блока 12 регулирования частоты и блока 13 регулирования напряжения преобразователя, являясь сигналом задания на выходные частоту и напряжение преобразователя 7. Сигналы с выхода фор5сирующего блока 25 на вторых входах суммирующих блоков 23 и 24 равны нулю. Блок 12 регулирования частоты увеличивает частоту импульсов, поступающих на тиристоры 1-6 инвертора.
0 Блок 13 управления напряжением преобразователя, воздействуя на управляемый выпрямитель 10, увеличивает выходное напряжение на зйжимах асинхронного двигателя 9. Двигатель
5 разгоняется в соответствии с законом изменения выходного напряжения задатчика 17 интенсивности. При изменении полярности сигнала с -Ugy на +Ug напряжение на выходе устройства
0 16 становится раным нулю, так как при спаде частоты двигатель начинает тормозиться (переходит в генераторный режим) и сигналом, поступающим на вход С с датчика 22 частоты вращения,
5 блок 16 блокируется, напряжение на его выходе становится равным нулю и напряжение на выходе задатчика 17 интенсивности начинает плавно уменьшать-ся, например, по линейному зако0ну. Нуль-орган 20 меняет свой знак на выходе. Знак на выходе нуль-органа 20 определяет состояние порогового элемента 18, т,е. определяет наличие сигнала на выходе А или в 1ходе Б порогового элемента 18.
5
Однако при переключении нуль-органа 20 переключения порогового элемента 18 не происходит, так как необходимо наличие еще двух логических единиц на втором и третьем входах
0 элемента И 19. При снижении частоты питающего напряжения двигателя до частоты скольжения (0,5- 10 Гц) на третьем входе схемы И 19 появляется вторая логическая единица. В мо5мент появления на втором входе схемы И 19 третьей логической единицы с датчика коммутации, свидетельствующей о том, что в данный момент коммутация отсутствует, пороговый
0 элемент 18 меняет свое состояние, т.е. единица появляется на выходе Б, а на выходе А сигна;л становится равным нулю, блок 12 регулирования частоты меняет программу. ра5боты, т.е., если при прямом чередоваНИИ фаз на выходе инверторе тиристо ры инвертора включились по программ в шесть циклов: I1,2,3 II2,3,4 III3,4,5 IV4,5,6 V5,6,1 VI6,1,2, то после переключения порогового эл мента вентили включаются по следующ программе: I1, б, 5 II6, 5, 4 III5,4,3 IV4, 3, 2 V3, 2, 1 VI2, 1, 6 Одновременно с переключением про раммы работы блока 12 регулирования частоты включается форсируюпщй блок 25, выходной сигнал которого подает ся с его выходов на вторые входь су мирующих блоков 23 и 24, форсируя тем самым напряжение и частоту на в ходе преобразователя частоты до величины, равной или выше номинальной (50-60 Гц), на время, необходимое для обеспечения на данной частоте двух или трех когда утаций.Для частот 50-60 Гц это время равно 5-10 мс, По истечении указанного времени сиг налы с выходов форсирующего блока становятся равными нулю, а на первы входах суммирующих блоков появляетс сигнал с выхода задатчика 17 интенсивности, обеспечивающий начальную частоту и начальное напряжение на зажимах двигателя, так как блокирующий сигнал с входа С блока 16 сним ется -по окончании торможения. Далее осуществляется частотный пуск электродвигателя в направлении, обратно предыдущему аналогично описанному выше.. Предлагаемый способ и устройство позволяют повысить быстродействие привода путем уменьшения времени ус тановления потокосцепления асинхрон ного электродвигателя, которое при реверсе на начальной частоте, прибли зительно равной частоте скольжения асинхронного двигателя, до.стигаетс я кратковременным повышением частоты напряжения на зажимах асинхронного электродвигателя. В устройстве это, обеспечено введением в схему двух суммирующих блоков и форсирующего блока и осуществлением новых связей а именно между первыми входами суммирующих блоков и выходом задатчика интенсивности, вторыми входами суммирующих блоков и выходами форсирующего блока и точками соединения выходов порогового элемента с входа ми блока регулирования частоты. Формула изобретения 1.Способ реверса асинхронного электродвигателя, подключенного к инвертору, при котором осуществляют частотное торможение до заданных минимальных значений частот и напряжений, затем изменяют порядок чередования фаз на выходе инвертора и производят пуск в обратном направлении, о,т л и ч а.ю щ и и с я тем, что, с целью уменьшения времени реверса, после изменения порядка чередования фаз на выходе инвертора кратковременно повышают частоту и напряжение на выходе инвертора до номинальной величины на время не менее двух коммутаций инвертора, а затем уменьшают частоту и напряжение до минимальных величин . 2.Устройство для осуществления способапо п. 1, содержащее преобразова-тель частоты, подключенный к асинхронному электродвигателю, выполненный на соединенных между собой автономном инверторе, узле коммутации, регулируемом источнике с фильтром, блоки регулирования частоты и напря|Жения,выходы которых подключены к преОбразователю частоты,датчики частоты вращения,цепь,составленную из последовательно, соединенных двух усилителей, блока определения знака аналогового сигнала и задатчика интенсивности, пороговый элемент, выходы которого соединены с входами блока регулирования частоты, а вход порогового элемента через схему И связан с выходами нуль-органа, датчика коммутации и точкой соединения выхода датчика частоты вращения с входом блока . выбора полярности аналогового сигнала, при этом вход нуль-органа соединен с выходом первого усилителя, вход датчика коммутации связан с преобразователем частоты, а вход датчика частоты вращения связан с асинхронным двигателем, отличающееся тем , что, с целью уменьшения времени реверса, в него введены два суммирующих блока и форсирующий блок, причем первые входы суммирующих блоков подключены к выходу задатчика интенсивности, вторые входы суммирующих блоков подключены к выходу форсирующего, блока, входы форсирующего блока подключены к точкам соединения выходов порогового элемента с входами блока регулирования частоты, выхода суммирующих блоков пЪрознь подключены к блокам регулирования частоты и напряжения преобразователя. Источники информации, принятые во внимание при экспертизе 1. Мерфи Дж. Тиристорное управление двигателями переменно ° Энергия, 1979, . : 2. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронизйрованными двигателями, М., Энергия, 1974, с. 296. 3.Авторское свидетельство СССР по . заявке №2576229/07,кл.Н 02 Р 7/42,1978

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым электроприводом | 1978 |
|
SU741399A1 |
| Устройство для реверса асинхронного частотно-регулируемого электродвигателя | 1983 |
|
SU1418881A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Частотно-регулируемый электропривод с экскаваторной характеристикой | 1979 |
|
SU904176A2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Преобразователь частоты для частотно-регулируемого электропривода | 1979 |
|
SU888321A1 |
6
±У
6ж
