(54) СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод экскаватора | 1979 |
|
SU829824A1 |
| Гидравлическая система рулевого управления транспортного средства | 1982 |
|
SU1197945A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2017 |
|
RU2651376C1 |
| Система сервоуправления гидроприводом экскаватора | 1983 |
|
SU1079780A1 |
| Гидравлическая система транспортного средства с гидрообъемной трансмиссией | 1983 |
|
SU1150139A1 |
| Гидравлический привод экскаватора | 1982 |
|
SU1105578A1 |
| Двухпоточный гидравлический при-ВОд эКСКАВАТОРА C ТЕлЕСКОпи-чЕСКОй СТРЕлОй | 1979 |
|
SU810915A1 |
| ГИДРОПРИВОД ЭКСКАВАТОРА | 1990 |
|
RU2041323C1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
Изобретение относится к системам рулевого управления, применяекым в строительной и дорожной технике, и может быть использовано на гидравлических машинах, преимущественно экс каваторах, оборудованных системой дистанционного сервоуправления, зол ник EU«H гидрораспределителей и аккумуляторным блоком питания. Известны систели рулевого управления, в при отказе двигате ля дистанционное управление .цилиндром поворота,колес обеспечивается приводтллм вручную дозатором-насосом Усилие на рулевом колесе- при этсм . значительно возрастает, что в аварийной ситуации является для машиниста ; дополнительной помехой 1. Наиболее близким техническим репением к предлагаемому является система рулевого управления, содержащая блок дистанционного управлени связанный с аккумуляторным блоком питания и золотниками гидрораспреде лителей, силовой цилиндр и планетар ный рулевой механизм, связанный через дифференциальную передачу -с дозируюшим гидромотором 2. Недостатком конструкции является увеличение усилия и угла поворота рулевого колеса при переходе на работу.дозирующего /гидромотора в режим ручного насоса при отказе двигателя внутреннего сгорания (ДВС). Цель изобретения - повышение надежности управления путем обеспечения в .аварийной ситуации при отказе двигателя кратковременной работы рулевого управления с неизменным усилием и углом поворота рулевого колеса и создание в схеме упора рулевого колеса. Указанная цель достигается за счет того, что в ней установлены дополнительные золотниковые гидрораспределители, подключенные к аккумуляторному блоку, питания, рычаг управления которых кинематически связан с подвижным элементом дифференциальной передачи, а между полостями силового цилиндра установлен сдвоенный обратный клапан, связанный с гидросистемой дополнительных золотниковых гидрораспределителей и дозирующего гидромотора. Дополнительным отличием предлагаемой системы является то, что для
создания упора рулевого колеса в крайних положениях управляемых колес на гидромагистрали между дополнительными эолотниковьми распределителями и дозируюиим гидромотором установлен обратный управляемый клапан.
На чертеже изображена часть схемы управления транспортно-дорожным средством, представляющая систему рулевого управления.
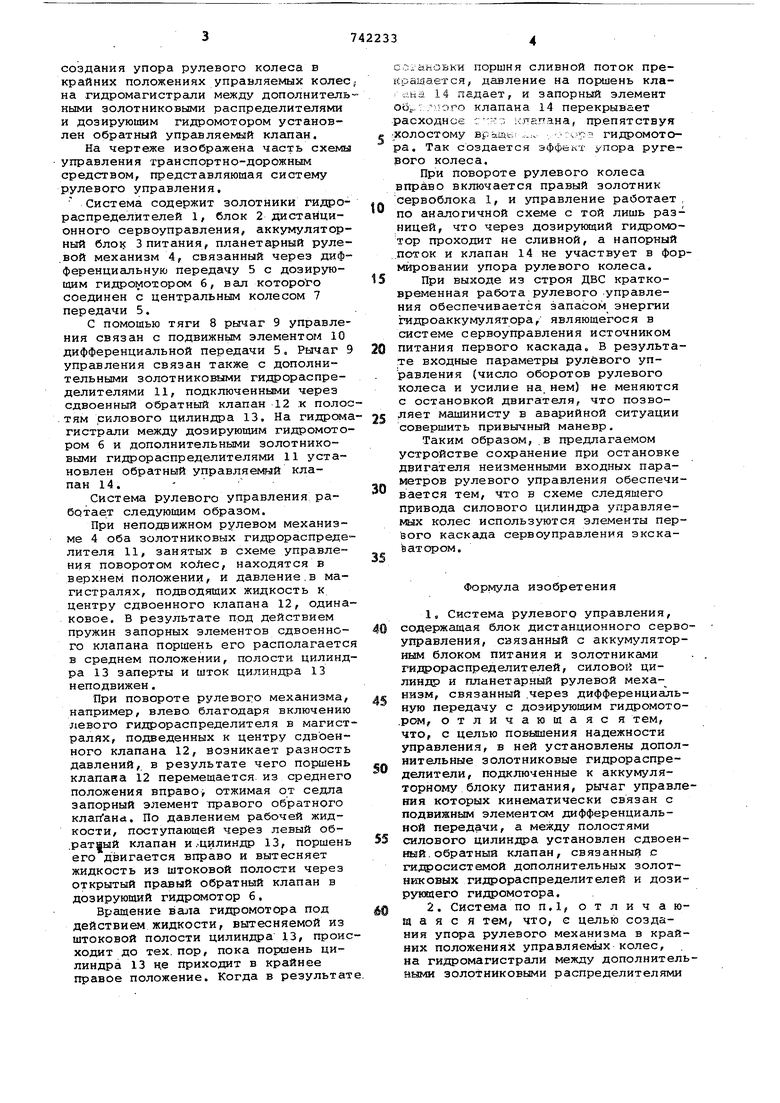
Система содержит золотники гидрораспределителей 1, блок 2 дистанционного сервоуправления, аккумуляторный бло 3 питания, планетарный руле.вой механизм 4, связанный через дифференциальную передачу 5 с дозирующим гидромотором 6, вал которого соединен с центральным колесом 7 передачи 5.
С помощью тяги 8 рычаг 9 управления связан с подвижным элементом 10 дифференциальной передачи 5. Рычаг 9 управления связан также: с дополнительными золотниковыми гидрораспределителями 11, подключенными через сдвоенный обратный клапан 12 .к полос. тям силового цилиндра 13, На гидрсмагистрали между дозирующим гидромотором б и дополнительными золотниковыми гидрораспределителями 11 установлен обратный управляемый клапан 14. Система рулевого управления работает следующим образом.
При неподвижном рулевом механизме 4 оба золотниковых гидрораспределителя 11, занятых в схеме управления поворотом колес, находятся в верхнем положении, и давление.в магистралях, подводящих жидкость к центру сдвоенного клапана 12, одинаковое. В результате под действием пружин запорных элементов сдвоенного клапана поршень его располагаетс в среднем положении, полости цилиндра 13 заперты и шток цилиндра 13 неподвижен.
При повороте рулевого механизма, например, влево благодаря включению левого гидрораспределителя в магистралях, подведенных к центру сдвоенного клапана 12, возникает разность давлений, в результате чего поршень клапана 12 перемещается из среднего положения вправоу отжимая от седла запорный элемент правого обратного клагСанй. По давлением рабочей жидкости, поступающей через левый об.ратинй клапан и .-цилиндр 13, поршень его двигается вправо и вытесняет жидкость из штоковой полости через открытый правый обратный клапан в дозирующий гидромотор б.
Вращение вала гидромотора под действием жидкости, вытесняемой из штоковой полости цилиндра 13, происходит до тех. пор, пока поршень цилиндра 13 не приходит в крайнее правое положение. Когда в результат
cOiaHOBKH поршня сливной поток прекращается, давление на поршень клаI cut а 14 падает, и запорный элемент o6j.,: .iioro клапана 14 перекрывает расходное ::, илкпана, препятствуя :холостому Bpaajbi ,.,;,. .-::; гидромотора. Так создается эффект упора ругевого колеса.
При повороте рулевого колеса вправо включается правый золотник сервоблока 1, и управление работает по аналогичной схеме с той лишь разницей, что через дозирующий гидромотор проходит не сливной, а напорный .поток и клапан 14 не участвует в фомировании упора рулевого колеса.
При выходе из строя ДВС кратковременная работа рулевого -управления обеспечивается запасом энергии гидроаккумулятора, являющегося в системе сервоуправления источником питания первого каскада. В результате входные параметры рулевого управления (число оборотов рулевого колеса и усилие на нем) не меняются с остановкой двигателя, что позволяет машинисту в аварийной ситуации совершить привычный маневр.
Таким образом,.в предлагаемом устройстве сохранение при остановке двигателя неизменными входных параметров рулевого управления обеспечивается тем, что в схеме следящего привода силового цилиндра управляеив Х колес используются элементы перfeoro каскада сервоуправления экскаватором.
Формула изобретения
1,Система рулевого управления, содержащая блок дистанционного сервоуправления, связанный с аккумуляториым блоком питания и золотниками гид ораспределителей, силовой цилингф и планетарный рулевой механизм, связанный .через дифференциальную передачу с дозирующим гидромото.pOMf отличающаяс я тем, что, с целью повышения надежности управления, в ней установлены дополнительные золотниковые гидрораспределители, подключенные к аккумуляторному блоку питания, рычаг управления которых кинематически связан с подвижным элементом дифференциальной передачи, а между полостями силового цилиндра установлен сдвоенный, обратный клапан, связанный с гидаюсистемой дополнительных золотниковых гидрораспределителей и дозирунняего гидромотора.
на гидромагистрали между дополнительными золотниковыми распределителями
и доэируюйшм гидрс отором установлен обратный управляекый клапан.
Источники информации, принятые во внимание при экспертизе
Л
