(54) ГИДРОПРИВОД ЗАТВОРА ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод затвора гидротехнического сооружения | 1979 |
|
SU990943A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 1968 |
|
SU221023A1 |
| Импульсный затвор гелиопечи | 1985 |
|
SU1310592A1 |
| Система управления движением сочлененных тракторов | 1987 |
|
SU1459965A1 |
| Предохранительная муфта | 1979 |
|
SU872842A1 |
| ГИДРОСТАТИЧЕСКАЯ МУФТА | 2000 |
|
RU2186270C1 |
| УПРАВЛЯЕМАЯ МУФТА | 1972 |
|
SU426083A1 |
| Лентопротяжный механизм с гидроприводом | 1969 |
|
SU287803A1 |
| Устройство для сброса плоского затвора гидротехнического сооружения | 1973 |
|
SU612996A1 |
| Привод двух конвейеров | 1987 |
|
SU1490045A1 |
I
Изобретение относится к механическому оборудованию гидротехнических сооружений, в частности к гидроприводам затворов. Известен привод затвора гидротехнического сооружения, включающий лебедку с тросогл, соединенным с затвором {.
Гибкая связь, трос, препятствует принудительному опусканию затвора и его прижатию к нижней части сооружения.
Известен также гидропривод затвора гидротехнического сооружения, содержащий гидроцилиндр, соединенный с устройством для подачи рабочей жидкости 2.
Известное устройство сложно в эксплуатации, так как при остановке затвора в любом произвольном положении оператор должен постоянно следить за просадкой, вызываемой утечками рабочей жидкости из гидросистемы, и вручную включать гидропривод на приподнятие затвора при его просадке на определенную величину.
Цель изобретения - упрощение эксплуатации путем автоматического поддержания затвора, остановленного в любом положении.
Эта цель достигается тем, что гидропривод снабжен датчиками положения затвора.
связанными с устройством для подачи рабочей жидкости, и нормально замкнутой сцепной муфтой с приводом, ведущая полумуфта которой кинематически соединена с затвором, а ведомай имеет эксцентрично расположенный груз и управляющий элемент, взаимодействующий с датчиками положения затвора.
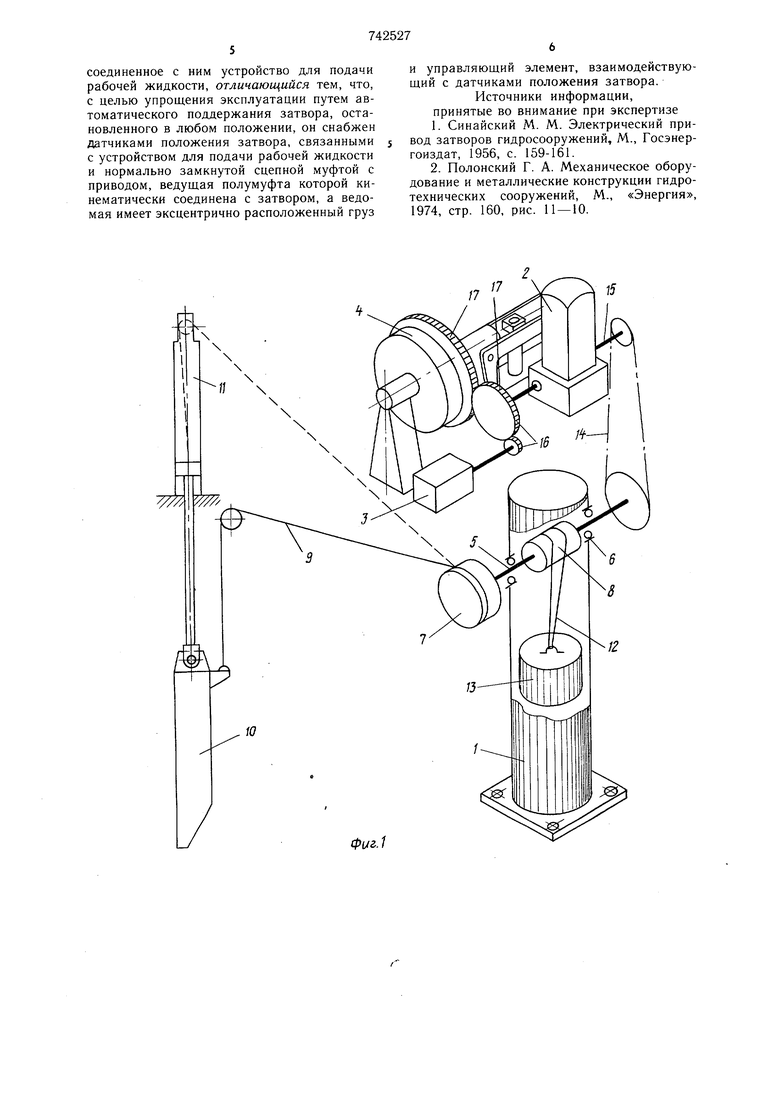
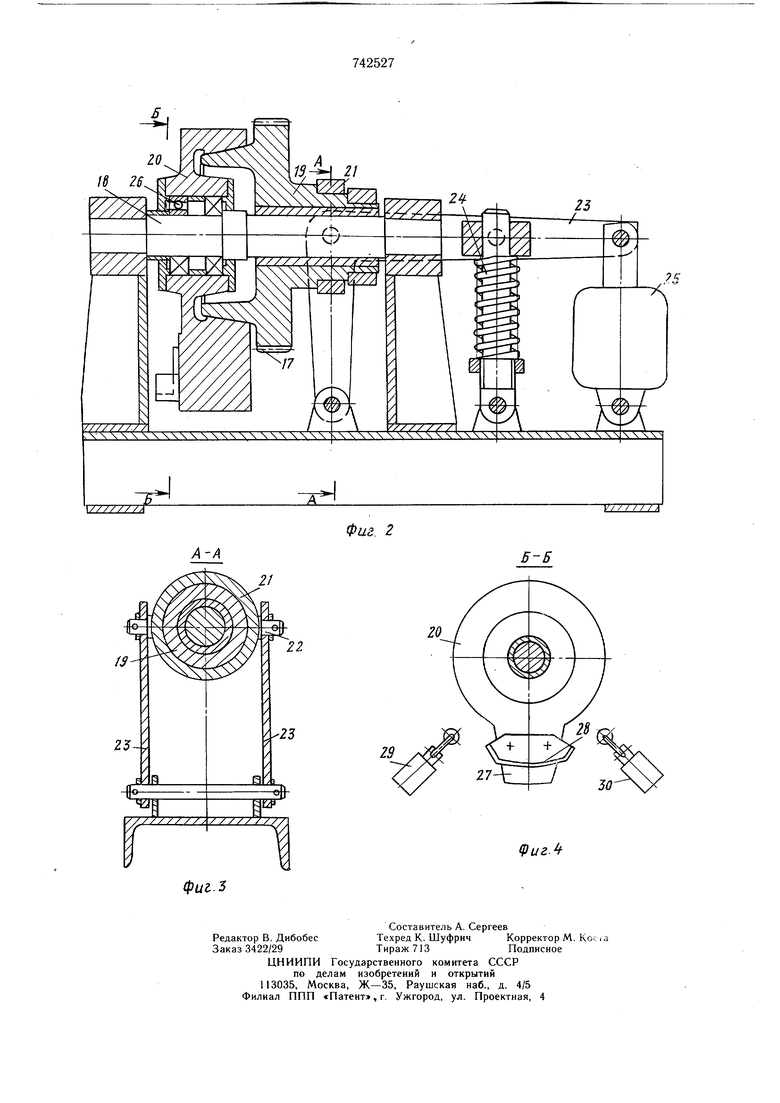
На фиг. 1 изображена кинематическая схема гидропривода; на фиг. 2 - сцепная муфта, продольный разрез; на фиг. 3 и 4разрезы А-А и Б-Б на фиг. 2.
Гидропривод затвора гидротехнического сооружения содержит гидроцилиндр I, щток которого присоединен к затвору 2, и устройство для подачи рабочей жидкости, куда входит насосная установка с управляющей
15 электрогидравлической аппаратурой (на чертеже не показаны). Гидропривод имеет колонку 3 управления, на которой смонтирована сцепная муфта 4.,
Сцепная муфта 4 состоит из установленных на оси 5 ведущей б и ведомой 7 фрикционных конических полумуфт. Ведущая полумуфта 6 с помощью открытой зубчатой пары 8, цепной передачи 9 и канатной передачи 10 кинематически связана с затвором 2,
причем натяжение этой кинематической цепи осуществляется контгрузом 11.
На хвостовую часть ведущей полумуфты 6 свободно надето и зафиксировано от осевого перемещения нажимное кольцо 12, так что полумуфта может свободно вращаться относительно этого кольца. Нажимное кольцо 12 своими цапфами 13 входит в продолговатые отверстия 14 Г-образных рычагов 15. Продолговатые отверстия 14 направлены радиально к оси вращения Г-образных рычагов 15, что позволяет ведущей полумуфте 6 перемещаться вдоль оси 5 при повороте Г-образных рычагов 15. К горизонтальному плечу Г-образного рычага 15 присоединены нормально сжатая замыкающая пружина 16 и привод для размыкания, например электромагнит 17,
Ведомая полумуфта 7, установленная на подщипниках качения 18, снабжена эксцентрично расположенным грузом 19. На ведомой полумуфте 7 закреплен управляющий элемент 20, взаимодействующий с дву.мя датчиками 21 и 22 положения затвора, установленными неподвижно. В качестве управляющего элемента использована выключающая линейка, а в качестве датчиков 21, 22 - концевые выключатели. При использовании других типов датчиков, например индуктивных, управляющим элементо.м будет- служить индуктивная пластина. Датчики 21 и 22 электрически связаны с устройством для подачи рабочей жидкости.
При остановке затвора 2 в любом произвольном положении тяговый электромагнит 17, включаемый только при выполнении операции подъема и опускания затвора, отключается. Замыкающая пружина 16, стремясь разжаться, воздействует на Г-образный рычаг 15, который поворачивается против часовой стрелки и, передавая усилие через цапфь 13 и нажимное кольцо 12 на ведущую полумуфту 6, обеспечивает ее сцепление с ведомой полумуфтой 7.
При просадке затвора 2, вызванной утечками масла из гидросистемы, кинематическая связь к ведущей полумуфте приходит в движение, благодаря чему ведомая полумуфта 7 поворачивается, а управляющий элемент 20 приближается к датчику 21. Когда затвор просядет на определенную величину, управляющий элемент 20 взаимодействует с датчиком 21, который подает сигнал устройству для подачи рабочей жидкости на приподнятие затвора. В процессе приподнятия затвора тяговый электромагнит 17 остается отключенным, а муфта 4 остается в сцепленном состоянии. Такая работа тягового электромагнита, при которой он включается только при подъеме или опускании затвора и остается отключенным в процессе приподнятия, обеспечивается электрической схемой управления гидроприводом.
Затвор 2 приподнимается, при этом ведомая полумуфта 7, будучи сцеплена с ведущей полумуфтой 6, поворачивается в сторону, противоположную той, в которую она поворачивалась при просадке затвора. Когда затвор 2 достигает определенного приподнятого положения, управляющий элемент 20 взаимодействует с датчиком 22, который подает сигнал на остановку затвора.
В приподнятом положении затвор, в котором датчик 22 подает сигнал на остановку, обычно принимает положение выше заданного, в котором затвор был остановлен оператором, на величину, равную установленной просадке. В этом случае при колебаниях затвора в интервале, определяемом нижним и верхним пределом срабатывания датчиков 21 и 22, в среднем поддерживается то заданное положение, в котором затвор был остановлен оператором. Изменяя пределы срабатывания датчиков 21 и 22, можно изменять среднее значение заданного под,1ерживаемого положения затвора.
После остановки затвора в приподнятом положении просадка его возобновится, и когда ее уровень достигнет нижнего предела, при котором срабатывает датчик 21, цикл повторяется. Такой процесс просадки и приподнятия затвора происходит автоматически в течение всего времени, пока оператору не потребуется перевести затвор в новое положение.
При переводе затвора в новое положение (это производится оператором . с помощью ключа управления затвором) одновременно с включением гидропривода на подъем или опускание, включается тяговый электромагнит 17. Якорь электромагнита втягивается, преодолевая усилие пружины 16, Г-образный рычаг 15 поворачивается по часовой стрелке и разъединяет полу.муфты 6 и 7. В результате разъединения ведущая полумуфта 6 начинает вращаться вхолостую, а ведомая полумуфта 7 под действием эксцентрично расположенного груза 19 поворачивается, при этом управляющий эле.мент 20 занимает исходное положение, восстанавливая первоначально заданные относительно этого положения интервалы подачи сигналов на приподнятие и остановку затвора. После перевода затвора 2 в новое положение тяговый электромагнит 17 отключается, полу.муфты 6 и 7 соединяются, и процесс просадки и приподнятия затвора происходит аналогично выщеописанному.
Такое выполнение гидропривода позволяет упростить его эксплуатацию путем автоматического поддержания затвора, остановленного в любом положении.
Формула изобретения
Гидропривод затвора гидротехнического сооружения, включающий гидроцилиндр и
соединенное с ним устройство для подачи рабочей жидкости, отличающийся тем, что, с целью упрощения эксплуатации путем автоматического поддержания затвора, остановленного в любом положении, он снабжен датчиками положения затвора, связанными с устройством для подачи рабочей жидкости и нормально замкнутой сцепной муфтой с приводом, ведущая полумуфта которой кинематически соединена с затвором, а ведомая имеет эксцентрично расположенный груз
и управляющий элемент, взаимодействующий с датчиками положения затвора.
Источники информации, принятые во внимание при экспертизе
Ф(/г.1
