1
Изобретение относится к электроизмерительной технике и южeт быть использовано для измерения параметров водной среды в процессе непрерывного вертикальногх) зондирования.
Известен глубоководный зонд, содержащий подводный блок (погружаемое устройство) с измерительными преобразователями, соединенный через элемент связи с бортовым устройством). Бортовое устройство глубоководного зонда содержит блок управления, миниЭВМ, блок дистанционной индикации, таймер, магнитную запись, цифропечать, телетайп, регистраторы и блок ручного управления. Информация об измеряемых параметрах, полученная при опросе измерительных преобразователей, в виде частотно-модулированных сигналов через элемент связи и устройство управления подается непосредственно или после обработки мини-ЭВМ на регистраторы.Частота измерения постоянная 1.
Недостатком этого зонда является .неоптимальный режим работы, так как частота опроса датчиков и скорости зондирования выбирается на основе субъективных оценок и не зависят от
характеристик измеряемой среды в точках измерений.
Известен также зонд-батометр ЦКБ ГМП, содержащий погружаемое устройство с датчиками параметров морской среды и преобразователями, соединенное через элемент связи с бортовым устройством. Бортовое устройство зонда-батометра содержит блоки управления и связи, блок формирования телеграфного кода, блок преобразования информации, телетайп и р егистраторы 2.
Недостатком зонда-батометра является увеличение времени зондирования и избыточность информсщии при уменьшении динс1мических погрешностей измерения параметров морской среды.
Наиболее близким к изобретению по технической сущности является цифровой адаптивный измеритель элементов физических полей океана, содержащий датчик, соединенный с преобразователем аналог-код, вычислитель, вход
которого соединен с выходом преобразователя аналог-код, систему автоматического регулирования, вход которой срединен с выходом вычислителя, исполнительный механизм и генератор
частоты измерений, выходы которых соединены с выходом системы автоматического регулирования, а выходы соответственно с датчиком и преобразователем аналог-код, а также регистратор, соединенный с выходом преобразователя аналог-код 3,
Недостатками данного устройства является то, что в устройстве не учи тывается постоянная времени первичного преобразователя (датчика), а, следовательно, йе обеспечивается фактическая адаптация измерения среды. Каждый датчик, как известно, позволяет в зависимости от величины собственной постоянной времени измерять с погрешностью меньше заданной только те процессы, в которых градиент изменения параметров не превышает определенной критической величины 4т-крит, где Дх - градиент измеряемого параметра; ЛЪ - градиент времени. Если таким датчиком измерят процессы, имеющие большие градиенты, то появляющаяся динамическая ошибка превышает допустимую, а следовательно, и результат измерения искажается Задачей адаптации должна стоять необходимость обеспечения взаимного соответствия технических возможностей прибора и параметров среды. В данном устройстве управляющий сигнал появляется в результате сравнения среднего приращения (полученного на основании п измерений за неизвестное время) с неким опорным. Очевидно, что при таком подходе адаптации, как таковой, не происходит. Допустим, что на каком-то промежутке перемещения устройства существует градиент .параметра, равный Д . Так как имеется возможность изменения частоты опроса, то на этом интервале перемещения возможно получить п измерений или за время At, или за какое-то другое время utj. Несмотря на разное время измерения, устройство вырабатывает один и тот же управляющий сигнал, никакой адаптации не происходит хотя условия измерения в первом и во втором случаях принципиально различаются, результаты измерений имеют различный порядок динамической ошибки, а при сокращении времениизмереЬия меньше допустимого возможно появление условия ЛХ/ JL |коиТ.,
дТ- At l
где л Х( - текущий градиент параметра
ut, - текущий градиент времени, при котором результат наблюдения должен быть забракован. Естественно, что данная структура не позволяет работать в наиболее эффективном, оптимальном режиме с обеспечением условия
Д X
4Х,
JKPUT-.
ut ut
Кроме ТО-ГО-, в устройстве отсутствуют условия для- выполнения зондирования в минимальное время с обеспечением величины динамических погрешностей меньше определенного значения Минимальное время обеспечивается, совместно регулируя частоту опроса и скорость погружения, причем выбор нужного режима работы должен осущестляться на основе данных о текущих значениях частоты, скорости и градиента параметров. В данном устройстве адаптация сводится к изменению либо темпа измерения, либо скорости погружения.
Целью изобретения является сокращение времени зондирования.
Поставленная цель достигается тем, что в бортовое устройство введены схемы управления, дешифратор состояний, входы которого соединены с выходами блока выбора частоты опроса и блока управления лебедкой, а выход непосредственно и через инвертор соединен с одними входами схем управления и блок градиентов, вход которого соединен с выходом блока приема и преобразования, а выход через другие входы схем управления соединен с блоком выбора частоты опроса и блоком управления лебедкой.
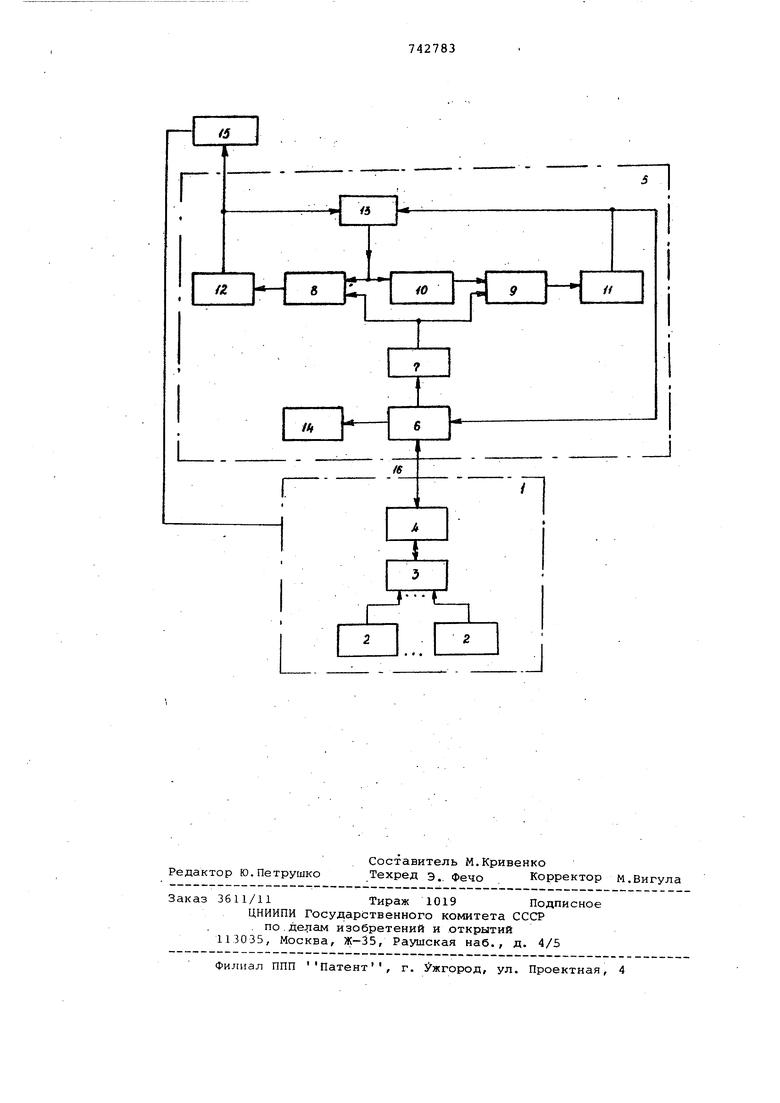
На чертеже изображена структурная схема зондирующего устройства для измерения параметров водной среды.
Зондирующее устройство дпя измерения параметров водной среды содержит погружной контейнер 1, в состав которого входят датчики 2 параметров водной среды , преобразователь 3, входы которого соединены с выходами соответствующих датчиков 2, приемопередатчик 4, вход и выход которого соединены с выходом и входом преобразователя 3 соответственно, бортовое устройство 5, в состав которого входят блок б приема и преобразования, блок 7 градиентов, вход которого соединен с выходом блока б приема и преобразования, схемы 8 и 9 управления, первые входы которых соединены с выходом блока градиентов инвертор 10, блок 11 выбора частоты опроса, вход которого соединен с выходом схемы 9 управления, а выход соединен с входом блока б приема и преобразования, блок 13 управления лебедкой, вход которого соединен с ВЫХОДОМ- схемы 8 управления, дешифратор 13 состояний, входы которого соединены с выходами блока 11 выбора частоты опроса и блока 12 управления лебедкой, а выход соединен со вторым входом схемы 8 управления и через инвертор 10 со вторым входом схемы 9 управления, регистратор 14, вход которого,соединен с выходом блока приема и преобразования, лебедку 15, соединенную с блоком управления лебедкой и погружным контейнером, линию 16 связи, соединяющую блок б приема и преобразования и приемопередатчик 4, Датчики 2 измеряют пара метры водной среда такие, как.напри мер температуру, удельную электрическую проводимость, давление (глу1бину) , содержание кислорода и т.д. Преобразователь 3 обеспечивает подключение датчиков 2 с необходимой частотой опроса и преобразование вы ходных параметров датчиков в вид, удобный для передачи по линии 16 связи. Приемопередатчик 4 принимает команду на опрос датчиков с бортово го устройства и передает значение измеренных параметров на бортовое устройство.Блок 6 приема и преобразования осуществляет подачу команд на измерение в погружной контейнер, прием информации из погружного контейнера вычисление в физических величинах измеренных параметров водной среды и выдачу информации на регистрацию. Блок градиентов 7 вычисляет градиен ты измеренных параметров и сравнива ет их с допустимыми пороговыми значениями. В зависимости от программы адаптации в блоке градиентов вычисляется отношение Л У/ где приращение текущего значения параметра, например температуры; Лу-- приращение координаты времени или какого-либо друго го измеренного параметра, например глубины. Определение градиентов осуществл ется непрерывно или по серии послед вательных измерений. Блок И выбора частоты опроса регулирует частоту опроса датчиков в зависимости от градиента параметров и может быть выполнен в виде реверсивного счетчи ка с параллельным выходом. В этом случае схема 9 управления обеспечивает переключение счетчика на вычитание или сложение, а также фиксирование счетчика в любом промежуточ ном значении. Блок 12 управления ле бедкой регулирует скорость погружен в зависимости от градиента параметров и также может быть выполнен в виде счетчика с параллельным выходом причем управление его работой осуще ствляется схемой 8 управления. Дешифратор 13 состояний в зависимости от соотношения текущих значений час тоты опроса и скорости погружения формирует соответствующие команды управления на блок 12 управления ле бедкой и блок 11 выбора частоты, обеспечивая тем самым оптимальный режим зондирования с учетом достиже ния минимального времени работы. Устройство работает следующим об разом. Из блока 6 приема и преобразования через линию 16 связи на приемопередатчик 4 поступают команды на измерения. По этим командам преобразователь 7 подключается к соответствующему датчику 2, принимает информаЬ,ию от него и преобразует в соответствующий вид. Измеренные данные через приемопередатчик 4 и линию 16 связи поступают на блок 6 приема и преобразования, а затем в регистратор и блок 7 градиентов, где они, анализируются с целью определения градиентов, измеренных параметров и сравнения их с допустимыми пороговыми значениями. В блоке 7 градиентов формируются также и временные метки. В зависимости от пpoгpa 1мы адаптации в блоке вычисляются отношения Определение градиентов осуществлйется непрерывно или по двум последним измерениям, или по серии последовательных последних измерений. Допустимые пороговые значения вычисляются заранее, исходя из допустимых динамических погрешностей, дискретности измерения, постоянной временидатчиков и устанавливаются в блоке 7градиентов в качестве исходных данных. Если в результате анализа выявляется, что градиент измеренного параметра находится в допустимых пределах, то на выходе блока 7 градиентов формируется сигнал О, который закрывает схемы 8 и 9 управления. Этим самым достигается неизменность состояний блока 12 управления лебедкой и блока 11 выбора частоты опроса, и, следовательно, сохраняется оптимальный режим зондирования. Если в результате анализа выявляется, что градиент измеряемого параметра превьлшает допустимый, то для достижения оптимального режима зондирования необходимо либо увеличить скорость опроса датчиков, либо уменьшить скорость движения погружаемого контейнера 1. На выходе блока 7 градиента формируется сигнал , по которому схема 9 управления разрешает переход реверсивного счетчика блока 11 выбора частоты опроса в состояние, соответствующее более высоким скоростям опроса датчиков. Этот же сигнал поступает на схему 8управления и разрешает переход реверсивного счетчика блока 12 управления лебедкой в состояние, соответствующее меньшим скоростям зондирования. Переход счетчиков в новое состояние возможен лишь при поступлении команды с дешифратора 13 состояний, который, проанализировав текущие значения скорости погружения и час.тоты опроса датчиков, формирует необходимый управляюмшй сигнал. Оптимальные соотношения Между скоростью погружения и частотой опроса датчиков анализируется заранее, исходя из возможностей лебедки, режимов работы регистраторов, обеспечения минимального времени работы и т.д., и закладьшаются в виде жесткой программы в схему дешифратора 13 состояний.
Если градиент параметра уменьшается и возможно увеличение скорости погружения или снижение частоты опроса, то на выходе блока 7 градиента формируется сигнал , по которому схема 9 управления разрешает переход реверсивного счетчика блока 11 выбора частоты опроса в состояние, соответствующее меньшим скоростям опроса датчиков, а схема 8 управлени разрэиает увеличение скорости зондирования.
Изменение состояний блока 12 упраления лебедкой и блока 11 выбора частоты опроса продолжается до тех пор, пока не будет достигнут оптимальный режим зондирования.
Использование зондирующего устройства, в котором предусмотрена возможность изменения темпа измерения и скорости перемещения в зависимости от характеристик изучаемой водной среды, позволяет существенно повысить качество наблюдений за счет снижения динамической погрешности, увеличить срок службы и надежность работы аппаратуры за счет сокращения времени работы, снизить затраты машинного времени на обработку информации вследствие снижения избыточности получаемых данных, повысить производительность труда.
Формула изобретения
Зондирующее устройство для измерёйия параметров водной среды, содержащее погружной контейнер с датчиками параметров водной среды, преобразователем, входы которого соединены с выходами соответствующих датчиков, и приемопередатчиком,вход и выход которого соединены соответственно с выходом и входам преобразователя, бортовое устройство, в состав которого входят блок приёма и преобразования, блок выбора частоты otifjoca, выход которого соединен с входом блока приема и преобразования,
Q регистратор, вход которого соединен с выходом блока приема и преобразования, лебедку с блоком управления, соединенную с погружным контейнером, и линию связи, подключенную к приемопередатчику и блоку приема и преобразования, отличающееся тем, что, с целью сокращения времени зондирования, в бортовое устройство введен дешифратор состояний, входы которого соединены с выходом блока
0 выбора частоты опроса и выходом блока управления лебедкой, первая схема управления, вход которой соединен с выходом дешифратора- состояний, а выход соединен с входом блока управ5 Ленин лебедкой, вторая схема управления, вход которой через инвертор соединен с вьаходом дешифратора состояний, а выход соединен с входом блока выбора частоты опроса, и блок градиен0 тов, вход которого соединен с выходом блока приема и преобразования, а выход соединен со входами схем управления.
Источники информации, 5 .принятые во внимание при экспертизе
1. Проспект фирмы Нейл Браун глубоководный зонд Mark 111 СТО - Mark III СТО System. Nell Broun Instrument System I nc.
02. Маклаков А.Ф. и др. Океанографические приборы. Л., Гидрометеоиздат, 1975, с. 148.
- 3. Сб. Автоматизация научных исследований морей и океанов , 5 .4. 1,- Севастополь, изд. МШ АН УССР, 1972, с. 215 (прототип).
н

| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующее устройство для измерения гидрофизических параметров водной среды | 1985 |
|
SU1287085A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для измерения температуры и давления глубинных слоев морской воды | 1983 |
|
SU1239573A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ДОННОГО ГРУНТА | 1991 |
|
RU2036483C1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
| Батизонд для глубоководных измерений параметров морской воды | 1977 |
|
SU691742A1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |