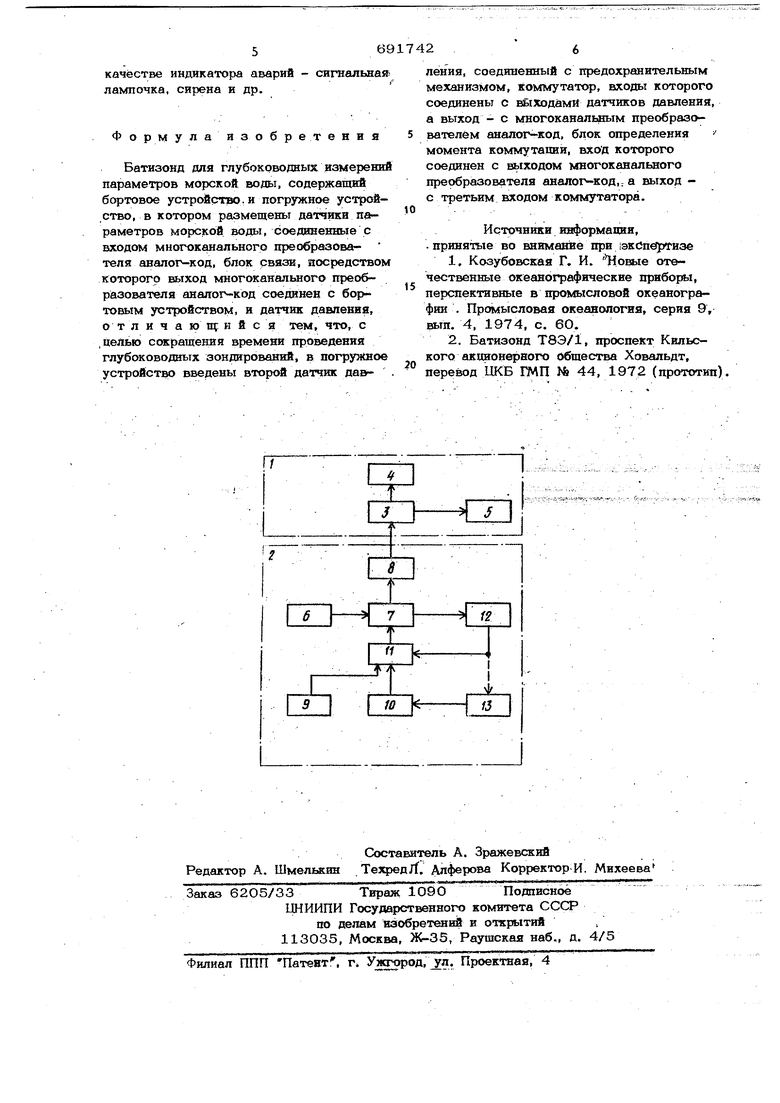
. ,I Изобретение касается измерительной техники и может быть использовано ДЛИ глубоководных измерений фнзикохимических параметров морской воды в процессе непрерывного зсждарования. Известно сусройство для глубоководных измерений параметров морской воды, содержащее подводное устройство с размешенными в нем датчиками параметров морской воды и глубины погружения с многоканальным преобразователем аналог-код и бортовое устройство в которое шюдит элемент свяйи с noiv.ружным устройством и регистрирующая аппаратура fll. Недост атком этого устройства является низкая точность измерения глубин погружения подводного устройства верхних, наиболее активных, с больишм градиентом параметррв слоев моря в результате использования одного датчика глубины погружения (датчика давлен на весь диапазон измерения глубины. Наиболее близким но технической сущности к предложенному является устройство (батиаонд), содержащее бортовое устройство и погружное устройство с датчиками температуры, электропроводности и давления (глубины погружения), соединенные с измерительным генератором (преобразователем аналогчастота) . Выход преобразователя аналогчастота сриединен посредстерм блока связи с бортоы 1м устройством. В устройстве для повышения точности измерения глубины погружения используют несколько сменных датчиков давления, каждый из которых рассчитан на определенный диапазон, что повышает точность измерения глубины погружения подводного устройства в верхних слоях моря. Установка требуемого диапазона выполняется вручную перед спуском погружного устройства 23. Однако для проведения непрерывных измерений параметров морской воды (зондирований) до предельных глубин .погружения с требуемой точностью измерения глубиш,т погружения требуется значительное время из-за подъемов погружного устройства после прохождения каждого диапазона измерения глубины. Цель изобретения - сокращение времени проведения глубоководных арндирований. Это достигается тем, что в бати- . зонд для глубоководных измерений параметров морской воды, содержащий бортовое устройство и погружное устройств в котором размещены датчики параметров морской воды, соединенные с вхо-т дом многоканального преобразователя аналог-код, блок связи, посредством которого выход многоканального преобр 13ователя аналог-код соединен с бортовым устройством, и датчик давления, в погружное устройство введены вто- ройдатчик давления, соединенный с предохранительным механизмом, коммутатор-, вхбды кЪторЪго соедйНёНЬ с выходами да-гчиков давления, а выход с многсжанальным преобразЪватёлем аналог-код, блок ой1 еделений ШмёНта; коммутации, вход которог:о соедаяен с выходом многб1каналй1ого преобравователя аналог-код, а выход - с третьим входом коммуTiaTOpa. На чертеже представлена структурная схема устройства, - . Батизонд для глубоководньтХ и;змерен йараметров морской воды содержит бортово устройство 1 ипогруяйое устройство, 2, В ссхзтев бортового устройства i вхойнт блок связи 3, рёгист раторы 4, й дйкато 3 аварий. В с:остав погружного устройст аа 2 входят датчики б параметров морс кой воды, мгогокавальный прёо разователь 7 аналог-код, блок связи 8, дач чик давления 9, датчик давления-10, коммутатор 11, блок 12 определения. момента коммутации к предохранительны механизм 13.. Устройство работает сле,аующим образом. Информация с датчиков 6 параметров морской воды и одного из датчиков 9 или 1О давления с помощью многоканал ного преобразователя 7 аналог-кол преобразуется в вид удобный для передачи по линии связи (код, частота и др,)С иыхода многоканального преобразователя 7 аналог-код информация через блок связи 8 погружного устройства 2 и блок связи 3 бортового устройства 1 поступает на регисараторы 4. В начале работы перед спуском погружного уст ройства 2 к входу многоканального преобразователя 7 аналог-код коммутатором 11 подключается датчик давления. При достижении погружным устройством 2 предельных рабочих глубин для датчика 10 давления, блок 12 определения момента коммутации по сигналу с многоканального преобразователя 7 аналог-код вырабатывает команду, iio которой коммутатор 11 подключает к входу многоканального преобразователя 7 аналог-код датчик 9 давления и отклк чает датчик 10 давления. Предохранитель ный механизм осуществляет гидравлическую блокировку датчика 10 давления от нарастающего давления среды, чтобы он не выщел из строя. Когда предохранительный механизм 13 обеспечивает гидра&лическу блокировку датчика 10 давления Ьт нарастающего давления среды, спуск погружного устройства 2 проводится до предельных рабочих глубин датчика 9 давления. При-подъеме погружного устройства 2 и при достижении предельной рабочей глубины для датчика 10 давления блок 12ойрё деле НИИ момента коммутации вырабатывает команду, Iio которой коммутатор 11 подключает к входу многоканальн:ого преобразователя 7 аналог-код датчик 10 давления н отключает датчик 9 давлений, а предохранительный механизм 13снимает гидравлическую блокировку с датчика 1О давления. Количество датчИкрв даЕшейия может быть любым и опргеделяется требуемой точностью измб5 ния глубины погружения и возможностью размгещения их в погружном устройстве. В 1сачествебпока определения момента коммутации может быть использован дещифратор глубины, анализирующий информацию на выходе многоканального преобразователя аналог-код во время подключения к его входу датчика давления. Предохранительный механизм может быть выполнен в видегерметизирующего,-клапана, блокирующего датчик малого диапазона. Управление предохра1гительным механизмом может осуществляться магнитным полем соленоида при подаче команды с блока определения момента коммутации, под воздействием нарастающего давления среды, без подачи команды на предохранительный механизм с блока определения момента коммутации и др. В. качестве узла контроля может быть использовано пороговое устройство, В
качестве индикатора аварий - сигнальная лампочка, сирена в др.
Ф
орм улан зобре тения
Батнзонд для глубоководных измерений параметров морской воды, содержащий бортовое устройство, и погружное устройство, в котором размещены датчики параметров морсзкой воды, соединенные с входом многоканального преобразовагтеля аналог-код, блок связи, посредством которого выход многоканального преобразователя аналог-код соединен с бортовым устройством, и датчик давления, о т л н ч а ю щ: и и с я тем, что, с .целью сокращения времени проведения глубоководных зондированнй, в погружное устройство введены второй датчик да&ления, соединенный с предохранительным механизмом, коммутатор, входы которого соединены с вБгходамй датчиков давления, а выход - с многоканальным преобразователем аналог-код, блок определения момента коммутации, вход которого соединен с вь1ходом многоканального преобразователя анало1 -код,: а выход с третьим входом коммзггатора.
Источники информации, принятые во внимание при |экспй)ртизе
1,Козубовская Г. И. Новые отечественные океанографические прнбо;я 1, перспективные в промысловой океанографии . Промысловая океанология, серия 9, вып, 4, 1974, с. 60.
2.Батизонд Т8Э/1, проспект Кильского акционерного общества Ховальдт, перевод ЦКБ ШП № 44, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| Морской зондирующий геофизический комплекс | 1978 |
|
SU868434A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВОД В СКВАЖИНАХ | 1995 |
|
RU2084006C1 |
| Батизонд для глубоководных измере-Ний пАРАМЕТРОВ МОРСКОй ВОды | 1979 |
|
SU800785A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Зондирующее устройство для измерения гидрофизических параметров водной среды | 1985 |
|
SU1287085A1 |
LIJ
