Изобретение относится к информационно-измерительной технике, может быть использовано для сбора и передами телеизмерительной информации, предназначено для построения вертикальной структуры изменения гидрофизических параметров с помощью авт номных зондирующих комплексов. По основному авт. св. № 922861 известна система для передачи те леизмерительной информации, содержащая оперативное запоминающее устройство; соединенное с узлом свя зи, блок сдвига совпадающих сигнало .и информационные каналы, каждый из торых содержит блок управления, бло переноса кода, преобразователь средней частоты и код, последовательно соединенные первичный измерительный преобразователь, преобразователь в частоту следования импульсов и частотное множительноделительное устройство, выход котор го подключен к первому входу преобразователя средней частоты в код, первый выход которого подключен к первому входу блока управления, второй его выход подключен к первому входу первого блока переноса кода, первый выход блока управления во всех информационных каналах, кроме последнего, привязочного, подключен ко второму входу первого блока переноса кода, во все информационных каналах второй выход блока управления соединен со вторым Входом преобразователя средней частоты в код, второй вход которого со динен с пусковой клеммой системы, выход первого блока переноса кода подключен соответственно к первому, второму и третьему входам оперативного запоминающего устройства, все информационные каналы, кроме послед него, содержат преобразователь приращения средней частоты в код, цифровой компаратор, блок цифрового за дания апертуры, счетный блок и второй блок переноса кода, причем второй, третий и четвертый выходы блока управления в них подключены соответственно к первому, второму и третьему входам преобразователя при ращения средней частоты в код, пя тый, шестой и седьмой выходы блока управления подключены соответственно к первым входам счетного блока, второго блока переноса кода и блока задания апертуры, выход которого подключен к первому входу цифрового компаратора, третий выход преобразователя средней частоты в код соединен с четвертым входом преобразователя приращения средней частоты В код, первый выход которого под-, кяючен ко второму входу 1(ифрового компаратора, выходы всех счетных блоков подключены к третьему входу блока управления своего информационного канала и k третьему и четвертому входам блока управления последнего информационного канала, выход цифрового компаратора каждого информационного канала, кроме последнего, соединен с четвертым входом блока управления, вторым входом счетного блока и соответственно с первым и вторым входом блока сдвига совпадающих сигналов, первый, второй и третий выходы блока сдвига совпадающих сигналов соединены с пятыми входами блоков управления всех информацион- . ных каналов, выходы вторы х блоков переноса кода всех информационных каналов, кроме последнего, подключены соответственно к четвертому и пятому входу оперативного запоминающего устройства , второй и третий выходы преобразователя приращения средней частоты в код подключены ко второму и третьему входам второго блока переноса кода; преобразователь средней частоты в код 8 последнем информационном канале содержит реверсивный счетчик, регистр сдвиГа, генератор опорной частоты и блок сдвига совпадающих импульсов, при это первый вход преобразователя средней частоты в код соединен с первыми входами регистра сдвига и блока сдвига совпадающих импульсов , второй вход преобразователя средней частоты в код соединен со вторым входом регистра сдвига и первым входом реверсивного счетчика, выход генератора опорной частоты подключен к третьему входу регистра сдвига и Е1торому входу блока сдвига совпадающих импульсов, выход регистра сдвига подключен к первому выходу преобразователя средней частоты в код и третьему входу блока сдвига совпадающих импульсов, первый и второй выходы которого соединены с третьим выходом преобразователя средней частоты в код, второй выход которого соединен с выходами разрядов реверивного счетчика ClJ. , Эта система позволяет уменьшить инамическую погрешность, связанную
только с оцифровкой и привязкой к глубине измеряемых сигналов. Однако, система не устраняет составляющую динамической погрешности, связанную с инерционностью первичных измерительных преобразователей. Большинство датчиков для измерения гидрофизических параметров являются фильтрами низкой частоты (апериодические инерционные звенья. Особенно большой инерционностью (до 0,5-1,0 с) обладают датчики температуры воды. При вертикальном зондировании инерционные датчики измеряют нестационарные процессы измерения гидрофизических полей. При этом сигнал на выходе инерционного датчика отличается от измеряемого параметра на величину динамической погрешности, зависящей от постоянной времени датчика, скорости движения зонда с аппаратурой по вертикали и вертикального градиента измеряемого параметра. В области сезонного термоклина в морях вертикальный градиент температуры воды достигает .Лри обычной скорости зондирования м/ и постоянной времени датчика температуры Т 1 с динамическая погрешность может достигать , что на порядок и больше превышает статистические погрешности датчика температуры. Для уменьшения этой составляющей динамической погрешности необходимо резко снизить скорости зондирования. Однако обеспечение малых и стабильных скоростей зондирования при широком диапазоне внешних воздействий волнения и течения на щэоцесс зондирования является сложнейшей проблемой, особенно для автономных комплексов, работающих с автоматических буйковых станций. Кроме того, снижение скорости зондирования приводит к увеличению времени измерения заданного вертикального профиля. В результате этого измерения вертикальная структура не может быть привязана к определен.; ному времени, так как не учитывает ее изменчивости за время измерения.
Цель изобретения - повышение точности и достоверности системы за счет сокращения времени измерения.
Поставленная цель достигается тем, что в систему для передачи измерительной информации введен канал управления скоростью зондирования, содержащий последовательно соединенные детектор максимального сигнала, блок сравнения, исполнительный элемент, регулятор и блок задания граничных значений скорости,, выходы которого соединены с задающими входами блока сравнения, ив каждый информационный канал дополнительно введены сумматор, блок дифференцирования, блок коррекции и блок памяти коэффициентов коррекции, выход первичного измерительного . преобразователя соединен через блок дифференцирования t первым входом блока коррекции, соответствующим
входом детектора максимального
сигнала и входом блока памяти, коэффициентов коррекции, выход кото{эого соединен с вторым входом блока коррекции, выход блока коррекции соединен с управляющим вхддом сумматора , включенного между выходом первичного измерительного преобразователя и входом преобразователя в частоту следования импульсов.
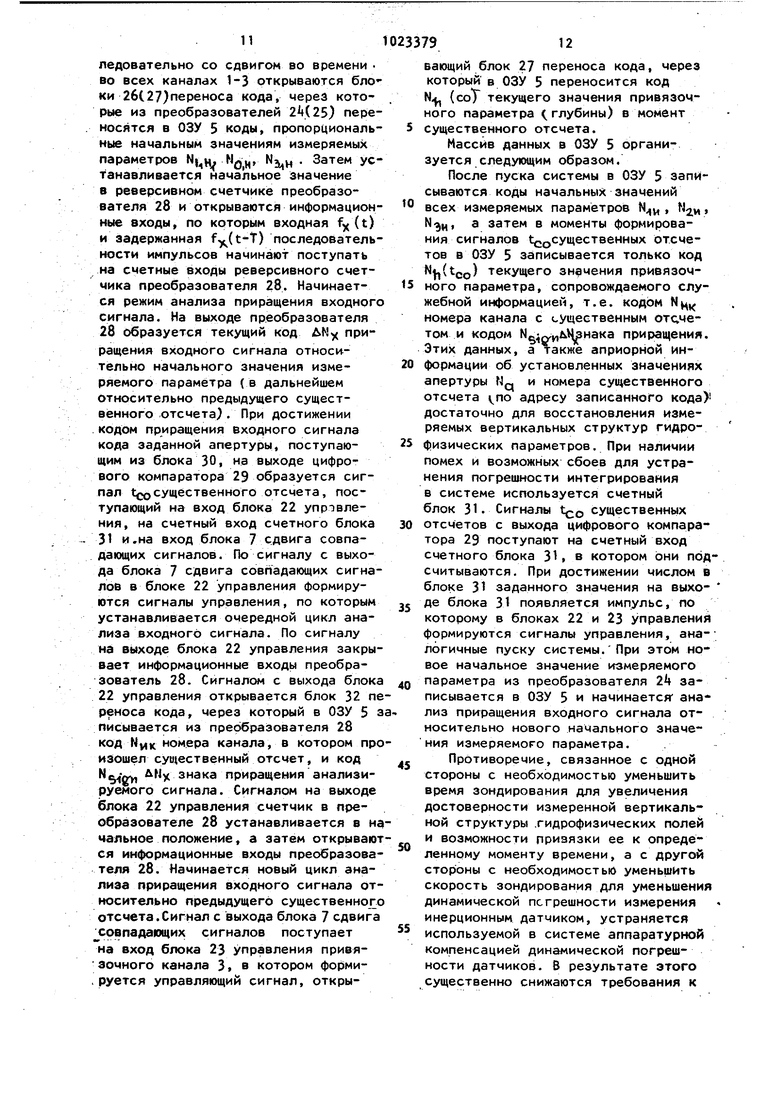
На чертеже изображена блок-схема системы.
Система содержит информационные каналы 1-3, канал 4 управления скоростью зондирования, оперативное запоминающее устройство 5, узел .6 связи, блок 7 едвига совпадающих сиг- налов. Каждый информационный канал 1-3 содержит первичный измерительный, преобразователь 8(9), блок 10(11)
дифференцирования, сумматоры 12 (13) блок 14 (15) коррекции, блок 1б (17) памяти коэффициентов коррекции, пре-; образователь 18(19)в частоту следования импульсов, частотное множительно-делительное устройство 20(21)-, блок 22(23) управления, преобразователь 24(25) средней частоты в код, блок 26(27) переноса кода. Все информационные каналы, кроме последнего
привязочного канала 3, дополнительно содержат преобразователь (28 приращения средней частоты в код, цифровой компаратор 29, блок 30 цифрового задания апертуры, счетный блок 31 и блок 32 переноса кода. Канал k содержит детектор 33 максимального сигнала, блок 34 сравнения, блок 35 задания граничных знаний, скорости, исполнительный элемент 36 и регулятор 37.
Система работает следующим образом.
Аппаратура системы в зависимости от применяемой системы спуска и подъема зондирующего комплекса может располагаться или в зонде или, в ос новном, на борту плавучести, откуда производится зондирование. Если используется система спуска и подъема со свободным движением зонда по направляющему кабель-Tpocv, то аппаратура размещается в корпусе зонда (этот вариант представлен на чер теже , а в бортовой аппаратуре размещается узел связи, буферное ОЗУ, программно-временное устройство и блок передачи данных (не показаны. Принцип аппаратурной компенсации динамической погрешности, связанной с измерением инерционным датчиком нестационарного процесса, заключает ся в следующем. В процессе зондирования измерителя гидрофизических параметров вме те с носителем аппаратуры перемещаются относительно измеряемой среды, поэтому на входе датчиков измеряемы процесс нестационарен, причем степень изменчивости зависит от скорое ти перемещения носителя по вертикали и от вертикального градиента измеряемого параметра. Большинство да чиков гидрофизических параметров по реакции на измеряемый процесс можно представить в виде инерционного апе риодического звена фильтра низкой частоты). Инерционность датчиков приводит к тому, что между приведенным измеряемым параметром и сигналом на выходе датчике в любой момент времени имеется разница, зависящйя от скорости изменения сигнала на выходе датчика и от постоянной времени датчика и являюща4СЯ динамической погрешностью измерения датчика . CD где X - измеряемый параметр; U)t - сигнал на выходе датчика; clU Idt - первая производная сигнала датчика по времени (скорос его изменения); К - коэффициент усиления датчи ка (статический коэффициен передачи); Ту - постоянная времени датчика;- динамическая погрешность датчика. Скорость изменения сигнала датчика можно представить в виде . ,.. - dox аи „ at. амг dt гдеЭих/(3 производная сигнала датчика по глубине, характеризующая вертикальный градиентйу/ДИ измеряемого параметра; первая производная глубины по времени, равная вертикальной составляющей скорости изменения глубины (скорости движения носителя) . Таким образом, скорость изменения сигнала Uy на выходе инерционного датчика несет информацию о характере изменения измеряемого параметра с глубиной (т.е. о вертикальном градиенте измеряемого параметра, а также о скорости движения носителя, и изменение любого из них сказывается на сигнале Uy. Поэтому сигнал и может быть использован как для формирования корректирующего сигнала для компенсации динамической погрешности, так и для формирования сигнала обратной связи для управления скоростью движения носителя. Скомпенсировать динамическую погрешность инерционного измерителя можно с помощью последовательной коррекции динамических характеристик датчика, например, путем подключения к выходу датчика корректирующего блока первого порядка, настроенного на эквивалентную постоянную времени датчика. Сущность последовательной коррекции заключается в том, что необходимо подобрать корректирующий блок таким, чтобы динамическая погрешность системы датчиккорректирующий блок стремилась к минимуму. Это возможно, если передаточная функция системы будет стремиться к некоторому коэффициенту, т.е. We(P)Vy(P) Уц(Р) К Где WQ(P) - передаточная функция системы датчик-корректирующий блок; W (Р) - передаточная функция датчика ; W (Р) - передаточная функция корректирующего блока; KC - коэффициент системы. Уравнение (3) характеризует елумай идеальной коррекции с полной компенсацией динамической погрешности. Тогда уравнение идеального корректиру19Щвго эвена имеет вид ) Следовательно,идеальное корректирующее звено должно иметь передаточн функцию, обратную передаточной функции датчика. Большинство гидрофизических датчиков представляют собой инерционные апериодические звенья первого порядка (фильтры низкой частоты) с передаточной функцией ) . , Основным условием идеальной кор рекции является выполнение равенст ва ( 4) и равенства постоянных времени датчика и корректирующего бло ка. Реальный корректирующий блокИмеет передаточную функцию KC кР- KWir-Жгде К - коэффициент коррекции пок зывающий во сколько раз уменьшается постоянная вре мени датчикаТ 5(; TX - постоянная времени корректирующего блока. Тогда передаточная функция системы с учетом (3),(5)) записывается )--: С7; . -irP При условииТГ51 Тц у равнение (7J Записывается С ) Таким образом, последовательное включение корректирующего звена с передаточной функцией (.6) приТу С действует эквивалентно уменьшению постоянной времени инерционного датчика в К раз. Иначе система дат чик - корректирующий блок аналогич на новому, датчику с постоянной вр мейи1х/К. В реальных услови1Р1х гидрофизиче кие датчики (в первую очередь датчик температуры воды) в динамическ отношении являются сложными непост янными звеньями, динамика кotopыx .(постоянная времени определяется е только конструкцией датчика, о и влиянием внешней среды и заоном изменения параметра. В общем лучае постоянная времени, наприер, датчика температу, определяется многими факторами, из которых i$ сновным относятся объем и масса чувствительного элемента, скорость потока морской воды, ориентация датчика в потоке, характер воздействия х;реды. На постоянную времени влияет также температура носителя аппаратуры, вид крепления к нему, направление движения носителя, обрастание, покрытие солью датчика, загрязнения и т.д. Кроме того, постоянная времени датчика , измеренная в лабораторных условиях в стоячей воде, в 2-3 раза меньше-, чем в натурных условиях. Изменчивость постоянной врейени в процессе зондирования и во времени требует соответствующей перестройки постоянной времени корректирующего блока- с помощью специального блока самонастройки в котором определяется текущая динамическая характеристика ( постоянная времени) датчика. В системе изложенные npvtHtiHrw реализуются следующим образом. С помощью первичного измерительного прербразователя В (Э) гидрофизический параметр х непрерывно преобразуется в электрический аналоговый сигнал Uy,На выходе блоков 10(11) дифференцирования из этого сигнала .формируется сигнал и , пропорциональный первой производной входного сигнала по времени (скорости изменения сигнала датчи ка). Этот сигнал поступает на вход ч блока 1 (15) коррекции, на выходе которого формируется корректирующий сигнал по выражению uk rKUk Коэффициент пропорциональности К блока 1(15) коррекции, равный текущей постоянной времени ZTj « ТГ; Датчика, устанавливается с помощью блока 16 (17, в котором переходный процесс, на основе которого определяется сигнал, пропорциональный текущей постоянной времени датчика f. Сигналом с выхода блока 16(17) изменяется постоянная времени блока Ц(5) коррекции. В сумматоре 12 (13) алгебраически суммируется сигнал Oj( с выхода поеобразователя 8 (9 ) и корректирующий сигнал и с выхода блока ) коррекции. Скорректированный сигнал и UyiTj U с выхода сумматора 12(13 поступает на вход преобразователя 18(19), сигнал Fx(t) с выход которого после масштабирования в. блоке 20 (21) в виде частотно-импульсного сигнала fy(t) поступает на вход преобразователя 2(25) средней частоты в код. Преобразователь 2(25)выполняет функции следящего осреднителя входного сигнала с непрерывным отсчетом выходного кода. Такой преобразователь может быть реализован, например, с помощью интегрирования реверсивным счетчиком входной fy(t) и задержанной fx(t-T) последовательности импульсов на интервале времени Т с помощью цифровой линии задержки. На выходе образуется непрерывно ( с дискретностью младшего разряда счетчика) изменяющийся параллельный код, являющийся цифровым эквивалентом измеряемого параметра X, В информационных каналах 1(2) (адаптивных) производится нег1рерывный анализ приращения выходного сигнала с помощью преобразователя 28 приращения средней частоты в код цифрового компаратора 29 и блока 30 цифрового задания апертуры, С выхода преобразователя 2 на входы преобразователя 28 поступают входная и f)(t) и задержанная fy(t-T) последовательности импульсов, В реверсивном счетчике преобразователя 28, периодически устанавливаемого в начальное положение, на счетные входы которого поступают эти последовательности импульсов, образуется цифровой эквивалент Й1 N текущего приращения входного сигнала относительно моментов начальной установки счетчика.Параллельный код ЛМу с выходов разрядов счетчика в преобразователе 28 непрерывно сравнивается на циф|х вом компараторе 2Э с кодом N. заданной апертуры, поступающим на другой вход компаратора 29 с блока 30. При достижении кодом текущего приращения входного сигнала кода заданной апертуры, определяемой в зависимости от допустимой погрешности восстановления анализируемой функции, срабатывает цифровой компаратор 29, на выходе которого формируется сигнал очередного существенного отсчета, По этому сигналу счетчик в прейбразователе 28 устанавливается в начальное положение и начинается новый цикл 5 амализа приращения входного сигнала относительно предыдущего существенного отсчета. Сигналы tco существенных отсчетов через блок 7 сдвига совпадающих сигналов поступают в информационный канал 3 откуда в ОЗУ 5 записывается текущий цифровой эквивалент Ну,(1(.з) привязочного параметра (например, глубины). Блок 7 необходим для сдвига сигналов существенных отсчетов, пришедших
из адаптивных каналов 1(2) одновременно, что необходимо для четкой работы ОЗУ 5. Последовательность работы информационной части системы следующая. По сигналу Пуск поступающему на пусковую клемму из блока программно-временного управления (не показанного на чертеже и определяющего цикличность работы системы), в блоках 22(23) управления всех каналой 1-3 формируются сигналы управления, устанавливающие блоки каналов в начальное положение. По сигналу блока 22(.23) управления
0 реверсивный счетчик и цифровая линия задержки в преобразователе 2(25 устанавливается в нулевое положение и открывается информационный вход, по которому на,вход преобразователя
5 2(25) начинает поступать входная последовательность импульсой fj(t). По сигналам блока 22 в преобразователе 28 устанавливается в начальное положение блок номера канала (триггер при двух адаптивных каналах) и триггер знака, определяющий направление счета в реверсивном счетчике и знак приращения сигнала, включается в работу
5 блок 30 цифрового задания апертуры, счетный блок 3t устанавливается в нулевое положение.
Первый импульс задержанной последовательности fx(t-T) появляется через интервал времени Т после пуска, на выходе цифровой линии задержки и с выхода преобразователя 2 (25) поступает на вход блока 22(23) управления, формируя 8 нем сигналы опроса преобразователей 24(25) и перехода блоков вадаптивных каналах 1(2) в режим анализа. По сигналу с Выхода блока 22(,23 управления последовательно со сдвигом во времени во всех каналах 1-3 открываются блоки 26(27) переноса кода, через которые из преобразователей 2k(2S) переносятся в ОЗУ 5 коды, пропорциональныв начальным значениям измеряемых параметров Нцц. , . Затем устанавливается начальное значение в реверсивном счетчике преобразователя 28 и открываются информациоиные входы, по которым входная fyXt) и задержанная f() последовательности импульсов начинают поступать на счетные входы реверсивного счетчика преобразователя 28. Начинается режим анализа приращения входного сигнала. На выходе преобразователя 28 образуется текущий код ANy приращения входного сигнала относительно начального значения измеряемого параметра (в дальнейшем относительно предыдущего существенного отсчета). При достижении кодом приращения входного сигнала кода заданной апертуры, поступающим из блока 30, на выходе цифрового компаратора 29 образуется сигпал t(4 jсущественного отсчета, поступающий на вход блока 22 управления, на счетный вход счетного блока 31 и,на вход блока 7 сдвига совпадающих сигналов. По сигналу с выхода блока 7 сдвига совпадающих сигналов в блоке 22 управления формируются сигналы управления, по которым устанавливается очередной цикл анализа входного сигнала. По сигналу на выходе блока 22 управления закрывает информационные входы преобразователь 28. Сигналом с выхода блока 22 управления открывается блок 32 переноса кода, через который в ОЗУ 5 зписывается из преобразователя 28 код номера канала, в котором произошел существенный отсчет, и код , NX знака приращения анализируемого сигнала. Сигналом на выходе блока 22 управления счетчик в преобразователе 28 устанавливается в начальное положение, а затем открываются информационные входы преобразователя 28. Начинается новый цикл анализа приращения входного сигнала относительно предыдущего существенного отсчета. Сигнал с выхода блока 7 сдвига совпадающих сигналов поступает на вход блока 23 Управления привязочного канала 3 в котором форми.руется управляющий сигнал, открывающий блок 27 переноса кода, через который в ОЗУ 5 переносится код N (соТ текущего значения привязочного параметра ( глубины) в момент существенного отсчета.
Массив данных в ОЗУ 5 организуется следующим образом.
После пуска системы в ОЗУ 5 записываются коды начальных значений всех измеряемых параметров ,, Н2и , а затем в моменты формирования сигналов 1соСущественных отсчетов в ОЗУ 5 записывается только код N(tcQ) текущего значения привязочного параметра, сопровождаемого служебной информацией, т.е. кодом N ц номера канала с 1,ущественным отсчетом и кодом .и Нзнака приращения. Этих данных, а также априорной информации об установленных значениях апертуры NQ и номера существенного отсчета (По адресу записанного кодаУ достаточно для восстановления измеряемых вертикальных структур гидрофизических параметров. При наличии помех и возможных сбоев для устранения погрешности интегрирования в системе используется счетный блок 31. Сигналы t существенных отсчетов с выхода цифрового компаратора 29 поступают на счетный вход счетного блока 31i в котором они подсчитываются. При достижении числом в блоке 31 заданного значения на выходе блока 31 появляется импульс, по которому в блоках 22 и 23 управлений формируются сигналы управления, аналогичные пуску системы.При этом новое начальное значение измеряемого параметра из преобразователя 2k записывается в ОЗУ 5 и начинается анализ пркращения входного сигнала относительно нового начального значения измеряемого параметра.
Противоречие, связанное с одной стороны с необходимостью уменьшить время зондирования для увеличения достоверности измеренной вертикальной структуры .гидрофизических полей и возможности привязки ее к определенному моменту времени, а с другой стороны с необходимостью уменьшить скорость зондирования для уменьшения динамической погрешности измерения инерционным датчиком, устраняется используемой в системе аппаратурной компенсацией динамической погрешности датчиков. В результате этого существенно снижаются требования к стабилизации и уменьшению скорости зондирования. Из выражения (2)видно, 4to для поддержания постоянной скорости изменения выходного сигнала датчика необходимо для участков вертикальной структуры с большим ве тикальным градиентом скорость движе ния носителя снижать, а для участко с малым градиентом - увеличивать. Д наиболее характерных районов морей и океанов с выраженным сезонным тер моклином градиент может меняться в двадцать и более раз, а участок тер моклина с большим градиентом занимает лишь малую долю зондируемой глубины, поэтому большую часть глубины, можно зондировать с большой ск ростью, замедляя ее лишь в области термоклина. Так как увеличение скорости зондирования в системе с компенсацией динамической погрешности не влияет на общую погрешность измерения, то путем управления скоростью движения носителя существенно сократить общее время зон дирования. В основу построения кана ла Ц положен принцип поддержания в заданных границах максимальной из скоростей изменения сигналов с датчиков. При этом скорость зондирования обратно пропорциональна максимальному вертикальному градиенту измеряемых параметров. Канал 4 работает следующим образом. Сигналы Uy , пропорциональные скорости изменения сигналов датчиков, с выходов блоков 10(11) дифференцирования поступают на входы детектора 33 максимального сигнала, в котором эти сигналы сравниваются после приведения к одному масштабу, и максимальный сигнал поступает на вход блока З сравнения, где он сравнивается с сигналами и%|) ivniM поступающими с блока 35, которые определяют границы скорости изменения сигнала датчика. Эти гра. ницы выбирают из соображений обеспечения для среднего градиента скорости зондирования с минимальными энергетическими затратами. Если максимальная из скоростей изменения сиг налов датчиков находится в заданных границах, то на выходе блока 3 срав нения сигнал отсутствует и скорость носителя не меняется. Если же в зависимостй от изменения градиента или 79 скорости носителя под воздействием внешних возмущений (волнение, течение, изменение сопротивления движению и т.д.) максимальная изскоростей изменения сигналов датчиков выходит за установленные границы, то на выходе блока З сравнения формируется сигнал управления, который в зависимости от того, какая из границ превышена, воздействует в ту или иную сторону на исполнительный элемент 36, перемещающий регулятор 37 до тех пор, пока скорость изменения сигнала датчика снова не войдет в установленные границы. Скорость движения носителя аппаратуры (зонда) можно менять различным образом (например, изменением плавучести носителя. На которую можно воздействовать либо изменением количества баластной жидкости носителя, либо изменением объ€:ма корпуса носителя). Изменение количества баластной жидкости носителя можно производить гидравлическими, пневматическими, электрическими и д.п. системами вытеснения и закачки забортной воды. Изменение объема корпуса носителя можно производить, например, вдвижением и выдвижением частей корпуса друг относительно друга. Скорость движения носителя можно менять также путем регулирования скорости вращения электропривода лебедки поднимающей носитель с помощью кабель-троса. Скорость движения носителя можно менять также путем изменения лобового сопротивления движению носителя, например, с помощью изменения угла атаки лопастей на корпусе носителя или изменением конфигурации корпуса носителя. Скорость движения носителя можно менять также с помощью специального движителя путем изменения его мощности. Если скорость носителя меняется регулированием скорости вращения электропривода лебедки, то канал k располагается на борту плавучести. Для остальных вариантов изменения скорости канал k располагается в корпусе носителя. За счет коррекции динамических характеристик инерционных датчиков в зависимости от скорости изменения сигналов датчиков и измеренных постоянных времени датчиков уменьшаются динамические погрешности . измерения системы. С другой стороны компенсация динамических погрешностей и их неза1висимость от скоpoctM движения носителя позволяет повысить достоверность измеряемой структуры гидрофизических параметров за счет уменьшения в|рёйени измерения, достигаемого путем регулирования скорости движения носителя, таким образом, чтобы максимальная из скоростей изменения сигналов датчиков находилась в заданных границах .



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ телеизмерения вертикальной структуры гидрофизических полей | 1981 |
|
SU1012308A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1054828A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1037313A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1056246A1 |
| Система для передачи телеизмерительной информации | 1982 |
|
SU1113832A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
СИСТЕМА ДЛЯ ПЕРЕДАЧИ ТЕЛЕИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ по авт.св. if 922861, отличающаяся тем, что, с целью повышения точности и достоверности системы, в нее введён канал управления скоростью зондирования, содержащий последовательно соединенные детектор максимального сигнала, блок сравнения, исполнительный элемент, регулятор и блок задания граничных значений скорости, выходы которого соединены с задающими входами блока сравнения, и в каждый информационный канал дополнительно введены сумматор, блок дифференцирования, блок коррекции и блок памяти коэффициентов коррекции, выход первичного измерительного преобразователя соединен через блок дифференцирования с первым входом блока коррекции, соответствующим входом детектора максимального сигнала и входом блока коэффициентов коррекции, выход которого 1§ соединен с вторым входом блока коррекции, выход блока коррекции соединен с управлякедим входом сумматора, включенного между выходом первичного измерительного преобразователя и входом преобразователя в частоту следования импульсов. Р N5 00 00 со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР Н 922861, кл.С 08 С 19/28, 1980 I (прототип) | |||
