10
11287085
Изобретение относится к электроизмерительной технике и может быть использовано для измерения параметров водной среды в процессе непрерывного вертикального зондирования.
Цель Изобретения - повьппение точности измерения параметров водной среды.
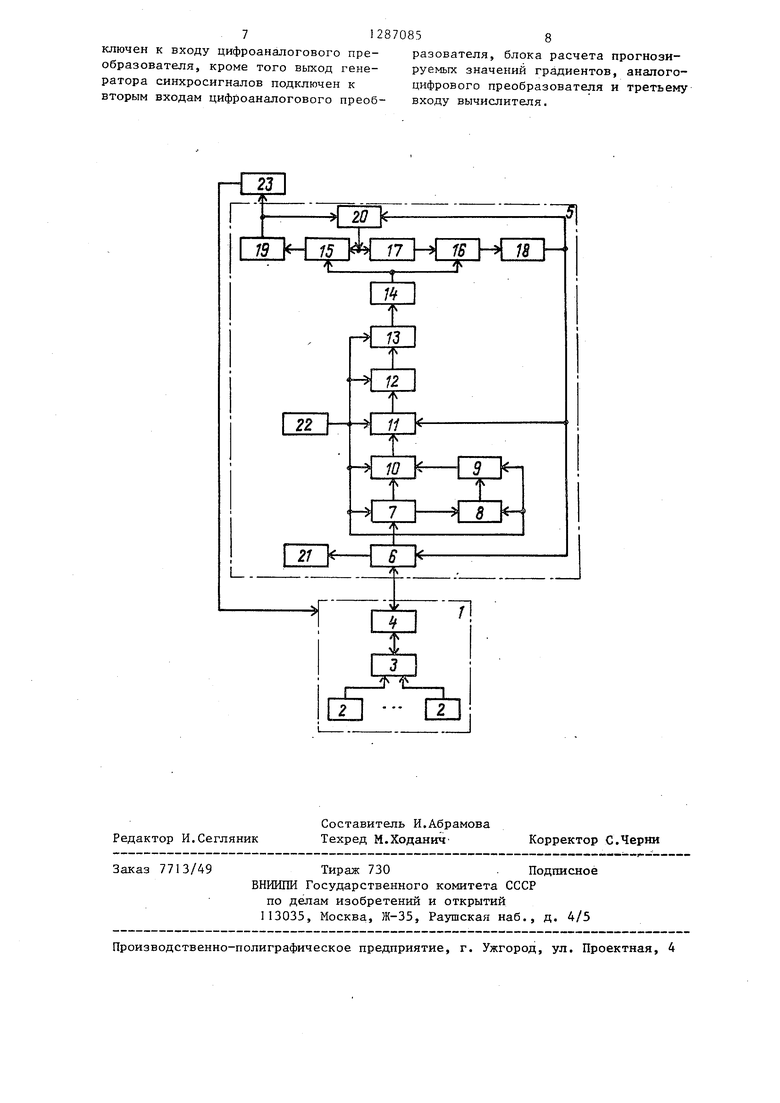
На чертеже изображена структурная схема зондирующего устройства для измерения гидрофизических параметров водной среды.
Зондирзпощее устройство для измерения гидрофизических параметров водной среды содержит погружной контейнер 1, в состав которого входят датчики 2 параметров водной среды, преобразователь 3, входы которого соединены с выходами соответствующих датчиков 2, приемопередатчик 4, вход и выход которого соединены с выходом и входом преобразователя 3 соответственно, бортовое устройство 5, в состав которого входят, блок 6 приетояний, входы которого соединены с выходами блока 18 выбора частоты опроса и блока 19 управления лебедкой, а выход соединен со вторым входом схемы управления 8 и через инвертор 17 со вторым входом схемы управления 16, регистратора 21, вход которого соединен с выходом блока 6 приема и преобразования, синхрогенератора 22, выход которого соединен со входами аналого-цифрового преобразователя 7, схемы 8 задержки цифройой информации на один такт, регистра памяти вычислителя 10, блока памяти 11, блока 12 15 расчета прогнозируемых значений градиентов и цифроаналогового преобразователя 13, лебедку 23, соединенную с блоком 19 управления лебедкой и погружным контейнером 1, линию связи, соединяющую блок 6 приема и преобразования, и приемопередатчик 4.
Предлагаемое устройство работает следующим образом.
Из блока 6 приема и преобразова20
JJC
ма и преобразования, аналого-цифровой - ния информации через линию связи на преобразователь 7, вход которого сое- приемопередатчик 4 поступают команды динен с выходом блока 6 приема и пре- на измерения. По этим командам преоб- образования, схема 8 задержки цифро- разователь 3 подключается к соответ- вой информации на один такт, вход ко- ствующему датчику, принимает от него торой соединен с выходом аналого-циф- - информацию и преобразует в вид, удоб- рового преобразователя 7, регистр ный для передачи по линии связи. Измеренные данные через приемопередатчик 4 и линию связи поступают на блок 6 приема и преобразования, а за- 35 тем в регистратор 21 для накопления и отображения информации.
памяти 9, вход которого соединен с выходом схемы 8 задержки цифровой информации на один такт, вычислитель
10,первый вход которого соединен с выходом аналого-цифрового преобразо-. вателя 7, а второй вход - с выходом регистра памяти 9, блока памяти 11, первый вход которого соединен с выходом вычислителя 10, блока 12 расчета прогнозируемых значений градиентов, вход которого соединен с выходом блока памяти 11, цифроаналогового преобразователя 13, вход которого соединен с выходом блока 12 расчета прогнозируемых значений градиентов, блока 14 градиентов, вход которого соединен с выходом цифроаналогового преобразователя 13, схемы 15 и 16 управления, первые входы которых соединены с выходом блока 14 градиентов, инвертора 17, блока 18 выбора частоты, вход которого соединен с выходом схемы 16 управления, а выход соединен с входом блока 6 приема и преобразования и со вторым входом блока памяти
11,блока 19 управления лебедкой, вход которого соединен с выходом схемы 15 управления, дешифратора 20 сосСинх рогенератор 22 служит для синхронизации работы введенных элемен40 тов 7-13.
Во время первого такта исходная информация из блока 6 приема и преобразования заносится в блок 7 АЦП, где происходит преобразование ана45 лог - код. Во время второго такта
предыдущее значение измеряемого параметра, хранимое в регистре памяти 9; и полученный цифровой код поступают на соответствующие входы вычислителя
50 10, при этом последнее значение поступает также IB схему задержки цифровой информации на один такт.
Таким образом, на входы вычислителя -поступают два цифровых кода, ха55 рактеризующие измеряемый параметр в двух точках х.{- и х.
Вычислитель 10 определяет величину
АХ X; - X
1-1
тояний, входы которого соединены с выходами блока 18 выбора частоты опроса и блока 19 управления лебедкой, а выход соединен со вторым входом схемы управления 8 и через инвертор 17 со вторым входом схемы управления 16, регистратора 21, вход которого соединен с выходом блока 6 приема и преобразования, синхрогенератора 22, выход которого соединен со входами аналого-цифрового преобразователя 7, схемы 8 задержки цифройой информации на один такт, регистра памяти вычислителя 10, блока памяти 11, блока 12 расчета прогнозируемых значений градиентов и цифроаналогового преобразователя 13, лебедку 23, соединенную с блоком 19 управления лебедкой и погружным контейнером 1, линию связи, соединяющую блок 6 приема и преобразования, и приемопередатчик 4.
Предлагаемое устройство работает следующим образом.
Из блока 6 приема и преобразова
Синх рогенератор 22 служит для синхронизации работы введенных элементов 7-13.
Во время первого такта исходная информация из блока 6 приема и преобразования заносится в блок 7 АЦП, где происходит преобразование аналог - код. Во время второго такта
предыдущее значение измеряемого параметра, хранимое в регистре памяти 9; и полученный цифровой код поступают на соответствующие входы вычислителя
10, при этом последнее значение поступает также IB схему задержки цифровой информации на один такт.
Таким образом, на входы вычислителя -поступают два цифровых кода, характеризующие измеряемый параметр в двух точках х.{- и х.
Вычислитель 10 определяет величину
АХ X; - X
1-1
которая во время третьего такта син- хрогенератора 22 запоминается в блоке памяти 1, где хранится N значений ДХ{, полученных за N-предыдущих шагов измерений, при этом значение Дх,, полученное на N-TOM предыдущем шаге, стирается, на его место записывается ДХщ , на место которого заносится и т.д. вновь введенное значение Дх хранится на месте дх.
Одновременно в блок памяти заносится информация об интервале опроса датчиков дуд со схемы 18 выбора частоты опроса и происходит сдвиг ранее хранимых временных данных. В течение этого же такта информация из схемы 8 задержки на такт заносится в регистр памяти 9. По следующему синхроимпульсу.; запускается блок расчетов прогнозируемых значений градиентов, в кото-20 зировав текущие значения скорости
ром с помощью полинома экстраполяции на основе N предьщущих значений градиентов, прогнозируется, значение градиента на следующий шаг измерений. Во время пятого такта вычисленные параметры преобразуются в цифроанало- говом преобразователе 13 и поступают в блок градиентов 14.
Таким образом, полная работа введенных устройств осуществляется за пять тактов синхрогенератора 22.
В блоке 14 градиентов в зависимости от программы адаптации вычисляют
и анализируются пу- 35 блока 17 градиентов формируется сигA s.АУ
тем сравнения с допустимыми пороговыми значениями. Допустимые пороговые значения вычисляются заранее, исходя
Если градиент измеряемого параметра меньше допустимого и возможно увеличение скорости погружения или снижения частоты опроса, то на выходе
отношения
нал +1, по которому схема управления 16 разрешает переход реверсивного счетчика блока 18 выбора частоты опроса в состояние, соответствующее
из допустимых динамических погрешнос- 40 меньшим скоростям опроса датчиков, тей, дискретности измерения постоян- а схема управления 15 разрешает уве- ной времени датчиков и устанавливают- личение скорости зондирования, ся в блоке 14 градиентов в качестве
исходных данных. Если в результате Изменение состояний блока 19 уп- анализа выявляется, что градиент из- 45 равления лебедкой и блока 18 выбора.
меренного параметра на следующей шаг находится в допустимых пределах, то на выходе блока 14 градиентов формируется сигнал О, который закрывает схемы 15 и 16 управления. Этим самым достигается неизменность состояний блока 19 управления лебедкой к блока 18 выбора частоты опроса датчиков, и следовательно,сохраняется оптимальный режим зондирования.
Если в результате анализа выявляется, что градиент измеренного параметра на следующий шаг превьш1ает допустимый, то для достижения оптимального режима зондирования необходимо либо увеличить скорость опр.оса датчиков, либо уменьшить скорость движения погружаемого контейнера 1. На выходе блока 17 градиентов формируется сигнал -1, по которому схема управления 16 разрешает переход реверсивного счетчика блока 18 выбора частоты опроса в состояние, соответствующее более высоким скоростям, опроса датчиков. Этот же сигнал поступает на схему управления 15 и разрешает переход реверсивного счетчика блока 19 управления лебедкой в состояние, соответствлощее меньшим скоростям зондирования. Переход счетчиков в новое состояние возможен лишь при поступлении команды с дешифратора 20 состояний, который, проанали5
погружения и частоты опроса датчиков, формирует необходимый управляющий сигнал. Оптимальные соотношения между скоростью и частотой опроса датчиков анализируются заранее, исходя из возможностей лебедки, режимов работы регистраторов, обеспечения минимального времени работы и т.д., и заключаются в виде жесткой программы в 0 схему дешифратора 20 состояний.
Если градиент измеряемого параметра меньше допустимого и возможно увеличение скорости погружения или снижения частоты опроса, то на выходе
частоты опроса продолжается до тех пор, пока не будет достигнут опти- мальный режим зондирования.
Датчики 2 измеряют гидрофизические параметры водной среды, такие как, например, температуру, электрическую проводимость, давление (глубину), скорость и т.п. Преобразователь 3 обеспечивает подключение
датчиков 2 с необходимой частотой опроса и представляет собой коммутатор аналоговых сигналов. Приемопередатчик 4 принимает команду на опрос датчиков с бортового устройства и
передает значение измеряемых параметров на бортовое устройство. .
Блок 6 приема и преобразования осуществляет подачу команд на измерение в погружной контейнер, прием информации из погружного контейнера, вычисление в физических величинах измеряемых параметров водной среды (масштабирование) и вьщачу информации на регистрацию.
Блок 18 выбора частоты опроса регулирует частоту опроса датчиков в зависимости от градиента параметров и может быть вьтолнен в виде реверсивного счетчика с параллельным выходом. В этом случае схема 16 управления обеспечивает переключение счетчика на вычитание или сложение, а также фиксирование счетчика в любом промежуточном значении. Блок 19
i
управления лебедкой регулирует скорость погружения в зависимости от градиента параметров и также может быть выполнен в виде счетчика с параллельным выходом, причем управление его работой осуществляется схемой управления I5. Дешифратор 20 состояний в зависимости от соотношения текущих значений частоты опроса и скорости погружения форьшрует соответствующие команды управления на блок 19 управления лебедкой и блок 18 выбора частоты опроса, обеспечивая тем самым оптимальный режим зондирования с учетом достижения минимального времени работы.
Введение новых устройств и новых связей позволяет существенно повысить точность измеряемой информации.
10
fS
20
ходом блока градиентов, инвертор, блок выбора частоты опроса, вход которого соединен с выходом второй схемы управления, а выход соединен с входом блока приема и преобразования, блок управления лебедкой, вход которого соединен с выходом первой схемы управления, дешифратор состояний, входы которого соединены с выходами блока выбора частоты опроса и блока управления лебедкой, а выход соединен с вторым входом первой схемы управления и через инвертор с вторым входом второй схемы управления, регистратор, вход которого соединен с выходом блока приема и преобразования, лебедку, соединенную с выходом блока управления лебедкой и погружным контейнером, линию связи, соеди25
няющую блок приема и преобразования и приемопередатчика, отличающееся тем, что,, с целью позьшге- ния точности измерения параметров водной среды за счет управления скоростью лебедки и выбора частоты опроса датчиков по прогнозируемому значению градиента измеряемого параметра на следующий щаг опроса, путем, расчета градиента измеряемого параметра
на следующий шаг по выбранному полиному на основании накопленного в блоке памяти массива предьщущих значений градиентов, в бортовое устройст- . во введены аналого-цифровой преобра35 зователь, схема задержки цифровой информации на один такт, регистр памяти, вычислитель, блок памяти, блок расчета прогнозируемых значений градиентов, цифроаналоговый преобразоваувеличить объем интересующих исследо- тель и генератор синхросигналов, -при- вателя данных.чем вход аналого-цифрового преобразователя подключен к второму выходу
Формула изобретения блока приема в преобразования информации, а выход цифроаналогового преЗондирзгющее устройство для измере- образователя подключен к входу блока
градиентов, выход аналого-хдафрового преобразователя соединен с вторым
ния гидрофизических параметров вод- . ной среды, содержащее погружной контейнер, в состав которого входят датчики параметров водной среды, преоб- рдзователь, входы которого соединены с выходами датчиков, приемопередатчик, вход и выход которого соединены с выходом и входом преобразователя соответственно, бортовое устройство, в состав которого входят, блок приема и преобразования, блок градиентов, первая и вторая схемы управления, первые входы которых соединены с вы50
55
входом вычислителя и через схему задержки и регистр памяти подключен к первому входу вычислителя, выход которого подключен к первому входу блока памяти, второй вход блока п&мяти , подключен к выходу блока выбора частоты опроса, третий вход подключен к выходу генератора синхросигналов, а выход соединен с первьш входом блока расчета прогнозирующих значений градиентов, выход которого под
ходом блока градиентов, инвертор, блок выбора частоты опроса, вход которого соединен с выходом второй схемы управления, а выход соединен с входом блока приема и преобразования, блок управления лебедкой, вход которого соединен с выходом первой схемы управления, дешифратор состояний, входы которого соединены с выходами блока выбора частоты опроса и блока управления лебедкой, а выход соединен с вторым входом первой схемы управления и через инвертор с вторым входом второй схемы управления, регистратор, вход которого соединен с выходом блока приема и преобразования, лебедку, соединенную с выходом блока управления лебедкой и погружным контейнером, линию связи, соеди
няющую блок приема и преобразования и приемопередатчика, отличающееся тем, что,, с целью позьшге- ния точности измерения параметров водной среды за счет управления скоростью лебедки и выбора частоты опроса датчиков по прогнозируемому значению градиента измеряемого параметра на следующий щаг опроса, путем, расчета градиента измеряемого параметра
на следующий шаг по выбранному полиному на основании накопленного в блоке памяти массива предьщущих значений градиентов, в бортовое устройст- во введены аналого-цифровой преобразователь, схема задержки цифровой информации на один такт, регистр памяти, вычислитель, блок памяти, блок расчета прогнозируемых значений градиентов, цифроаналоговый преобразователь и генератор синхросигналов, -при- чем вход аналого-цифрового преобразо50
55
входом вычислителя и через схему задержки и регистр памяти подключен к первому входу вычислителя, выход которого подключен к первому входу блока памяти, второй вход блока п&мяти , подключен к выходу блока выбора частоты опроса, третий вход подключен к выходу генератора синхросигналов, а выход соединен с первьш входом блока расчета прогнозирующих значений градиентов, выход которого подключей к входу цифроаналогового преобразователя, кроме того выход генератора синхросигналов подключен к вторым входам цифроаналогового преобРедактор И.Сегляник
Составитель И.Абрамова Техред М.ХоданичЗаказ 7713/49
Тираж 730. Подписное
ВНРПШИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
разователя, блока расчета прогнозируемых значений градиентов, аналого- цифрового преобразователя и третьему входу вычислителя.
Корректор С.Черни
| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| Устройство для определения характеристик ветра | 1990 |
|
SU1789931A1 |
| ПРИЕМО-ПЕРЕДАЮЩИЙ МОДУЛЬ УПРАВЛЕНИЯ, ОБРАБОТКИ ИНФОРМАЦИОННЫХ ДАННЫХ И СИГНАЛИЗАЦИИ ДЛЯ ЛОКАЛЬНЫХ КОМПЬЮТЕРНЫХ СЕТЕЙ | 2004 |
|
RU2286604C2 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| Следящий аналого-цифровой преобразователь | 1989 |
|
SU1674371A1 |
| Устройство для автоматического управления (его варианты) | 1984 |
|
SU1249481A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| Устройство для сбора и регистрации информации | 1984 |
|
SU1262552A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
Изобретение относится к электроизмерительной технике и может быть использовано для измерения параметров водной среды в процессе непрерывного вертикального зондирования. Цель изобретения - повьшение точности измерения параметров водной среды. Цель достигается за счет управления скоростью лебедки и выбора частоты опроса датчиков по прогнозируемому значению градиента измеряемого параметра на следующий шаг опроса. Расчет прогнозируемого значения градиента выполняется по выбранному экстраполяцион- ному полиному. В устройство включены между блоками приема и преобразования и блоком градиентов аналого-цифровой преобразователь, схема задержки цифровой информации на такт, регистр памяти, вычислитель, блок памяти, блок расчета прогнозируемых значений градиентов, цифроаналоговый преобразователь и генератор синхроимпульсов. 1 ил. ё (Л tc 00 « о 00 сд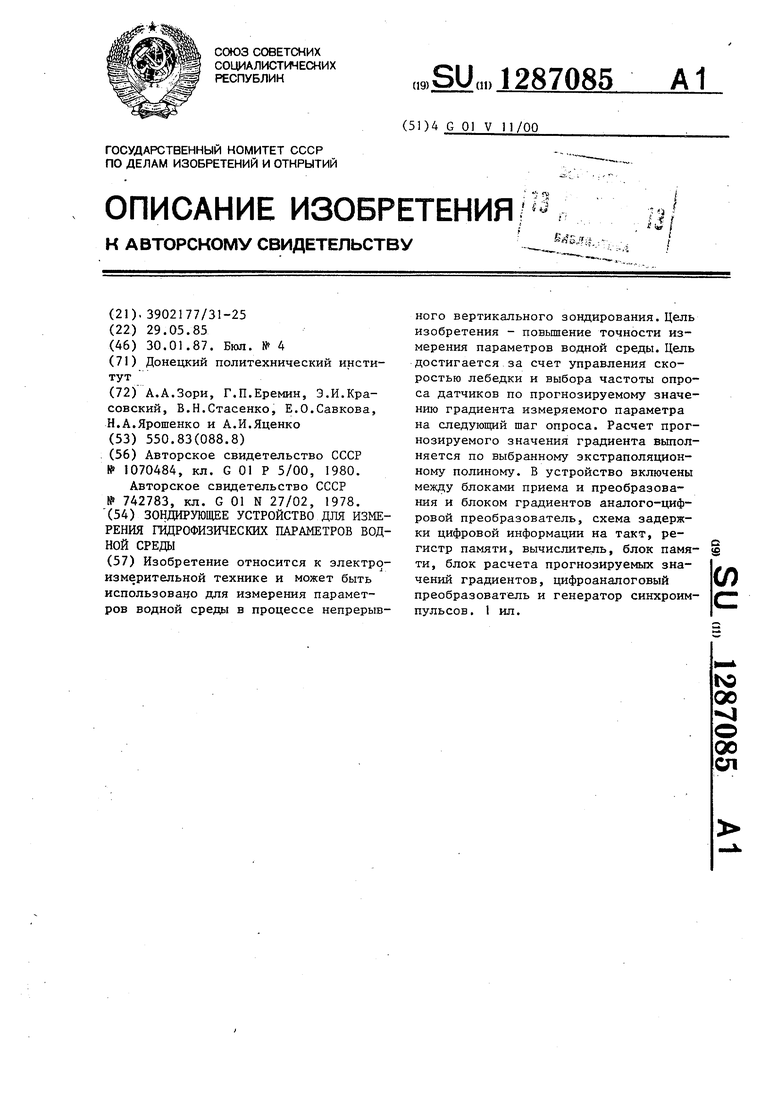
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
