ки кара, и реле памяти окончания цикла, втягивающая обмотка которого включена последовательно с замыкающим контактом реле окончания цикла, а обмотка воэврата-последовательно с его размыкающим контактом.
Кроме того устройство снабжено блоком ручного ввода управляющих сигналов на возврат кара, включающим в себя установленные в пульте управления pieлe выдержки времени с одним контактом с выдержкой и двумя без выдержки времени, причем контакт с вьвдержкой включен в цепь фазы,порядок включения которой не меняется, а два других - в цепи фаз,подклю-, чаемых с задержкой времени, и установленным на каре реле выдержки времени, подключенным к двум фазам, порядок включения которых может меняться.
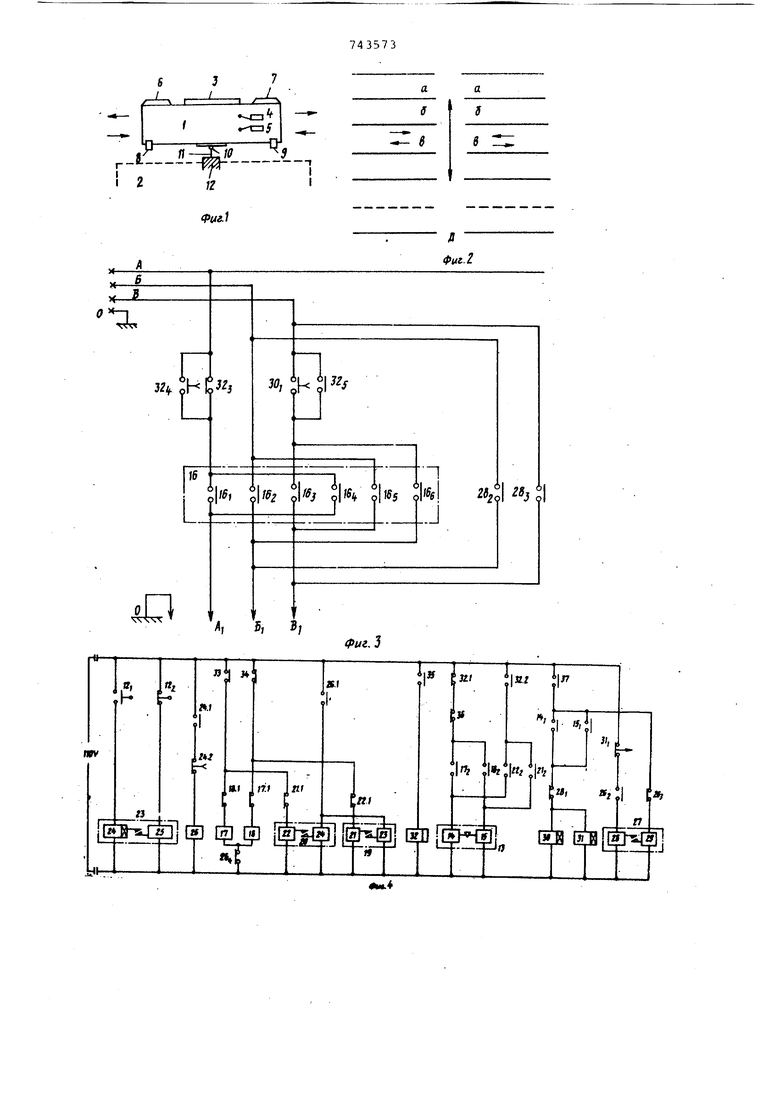
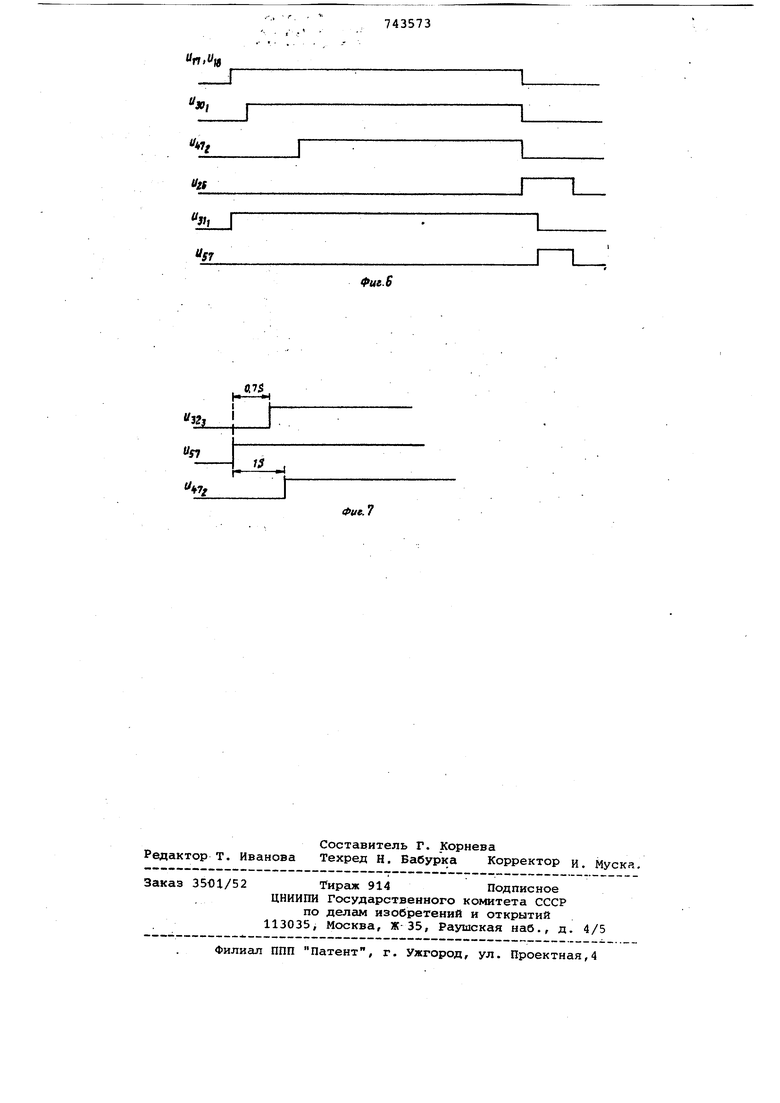
На фиг. 1 изображен самоходный электрокар, на котором используется предлагаемое устройство, вид спереди; на фиг. 2 - складское помещение, в котором используется самоходный электрокар, подсоединенный к системе питания и управления, вид сверху; на фиг. 3 и 4 - соответственно схемы питания и управления электрокара,находящиеся вне электрокара; на фиг. 5 - электрическая схема цепей, находящихся на борту электрокара; на фиг. 6 и 7 - временные диаграггмы, поясняющие работу устройства
Несмотря на то, что устройство может быть использовано при любом виде источника питания электрокара, будь то неподвижный щит или промежуточное подвижное передающее транспортное средство, а также при любы перемещениях электрокара относительно этого источника, облегчения понимания,оно будет описано для частного случая складского помещения, имеющего в соответствии с фиг.2 две группы параллельных складских коридоров (соответственно а,6, в), расположенных по обе стороны от центрального прохода Д.
Сс1моходный электрокар 1 установлен на вспомогательном транспортном средстве 2, верхняя часть которого изображена пунктиром. Средство 2 перемещается в центральном проходе по направлениям, указанньш стрелкой. П(5слё остановки средства 2 напротив двух боковых коридоров электрокар 1 перемещается, в соответствии с необх димостью, вправо или влево от транспортного средства.
На электрокаре имеются также средства для захвата и укладки грузов. Например, оно содержит подвижную платформу 3, перемещающуюся между двумя крайними уровнями. При этом нижнее положение платформы позволяет ей проходить под грузами, а в верхнем положении осуществляется
транспортировка груза. С этой плат формой связаны концевые датчики 4 и 5 с контактами 4 у, 4, 4, и соответственно.
На электрокаре 1 содержатся такж два датчика 6 наличия груза (щупы) с контактами бу,6 (см.фиг.5) и 7 соответственно справа и слева с контактами 7 и 7 (см.фиг.5), два датчика 8 и 9 с контактами 8 и 9/ соответственно, называемые датчикам запрета укладки, расположенные соответственно справа и слева и исключающие всякое перемещение платформы 3 до тех пор, пока электрокар 1 поностью не сойдет со средства 2. Эти датчики могут быть устройствами любого известного типа:. механическими магнитными, электромагнитными. Предпочтительнее выполнять их на индуктивностях, магнитное сопротивление которых меняется в зависимости от того, находятся они или нет около металлической детали, т.е. в данном случае, находятся они или нет около верхней платформы вспомогательного транспортного средства, на которую опирается электрокар.
Кулачок 10 взаимодействует с пальцем И концевого датчика 12 с контактами 12/ и 12 (см.фиг.4), установленного на вспомогательном транспортном средстве 2, и контролирует правильную остановку электрокара 1 в центре средства 2.
Электрокар содержит лебедку (на чертеже не показана) для наматывания кабеля, закрепленного на транспортном средстве 2, и средства,обепечиваквдие натяжение кабеля при любом направлении перемещения .(удалении или приближении) электрокара по отношению к средству 2.
При этом кабелю передаются электрическая мощность, необходимая двигателю, обеспечивающему перемещение электрокара относительно средства 2, двигателю, обеспечивающему подъем или опускание платформы 3, двигателю лебедки; команды пуска останова этих двигателей и выбора направления их вращения, формируемые из предварительных команд и информации, выдаваемой различными датчиками и щупами.
Электрокар 1 работает полностью автоматически и становится автономным, не считая подвода питания,если он получает с неподвижного пульта одну из следующих четырех информаци или команд: перемещение влево,перемещение вправо, конец перемещения, возобновление нормальной работы электрокара после возможного разрыв питания.
Электрические цепи позволяют запоминать эту информацию на электрокаре перед подключением к нему третьей фазы питания. Они находятся
частично на средстве 2, на котором закрепляется конец кабеля, и частично на электрокаре 1.
В дальнейшем термин неподвижные цепи будет обозначать те цепи,которые находятся на вспомогательном средстве 2 и которые, при отсутствии этого средства, размещались бы на неподвижном пульте, а термин под-, вижные цепи - те цепи, которые находятся на электрокаре 1.
С целью облегчения понимания работы этих цепей, для обозначения все элементов одного и того же реле или переключателя, а также контактов, включаемых по одной и той же команде даже если они принадлежат различным элементам, используются одинаковые обозначения с различными индексами, цепей необходимо будет обращаться к трем схемам, изображенным на фиг. 3,4 и 5, ниже дается перечень этих цепей.
Неподвижно цепи включают в себя: цепь трехфазного питания электрокара (см.фиг.3) цепь управления электрокаром (см. фиг. 4).
. Двигатели электрокара работают на трехфазном напряжении 380 Е. На кабеле питания три фазы обозначены А,Б и В, а буква О обозначает заземленный провод.
Три фазы питания со стороны источника обозначены А. Б. В.
Неподвижные цепи содержат: реверсор 13 влево-вправо 13 (см.фиг.4) с механической блокировкой, включающий в себя два реле 14 и 15, управляю1чие соответственно контактами 14у и 15у включенными параллельно в цепь управления выходом электрокара, при этом под выходом понимается отделение электрокара от его вспомогательного транспортного средства 2, и реверсирукмцие коммутатор 16 фаз, имеющий две группы из трех попарно противоположных контактов 16 - 1бб (см.фиг.3), которые в зависимости от своего положения соединяют фазы А, Б, В с фазами А/ Б в или с фазами А , В , Бсоответственно; два реле 17 и 18 (см.фиг.4) соответственно для перемещения электрокара влево и вправо по центральному проходу, каждое из которых управляет двумя контактами 17/, 17 и 18у, 18, контакты 17,, 18 включены последовательно с реле 18 и 17 соответственно и нормально замкнуты под напряжением, контакты 17 и 18, включенные последовательно с реле 14 и 15 соответственно, нормально разомкнуты под напряжением
два реле памяти 19 и 20 (см. фиг.4) запоминающих соответственно команды на перемещение вправо или влево по центральному проходу.
В свою очередь, каждое реле содержит обмотку блокировки 21 и 22 и обмотку разблокировки 23 и 24. Каждая из обмоток блокировки управляет двумя контактами 21 у, 21,j, 22 соответственно (см.фиг.4), при этом контакты 21Y и 22 нормально замкнуты, а контакты 22 и 21jj, связанные с цепями реверсора 13, нормально разомкнуты,
запоминающее реле 23, содержгицее обмотку 24 блокировки с задержкой и обмотку 25 разблокировки. Обмотка 24 находится под напряжением,когда палец 11 (см.фиг.2) не отжат, при этом контакт 12 является нормально замкнутым, обмотка 24 включается под напряжение при замыкании нормально разомкнутого контакта 12 датчика 12, который замыкается при нахождении электрокара 1 в центре средства 2 (или более точно, в центре его несущей платформы)/ когда палец 11 отжимается кулачком 10 (см.фиг.2). Обмотка 24 управляет двумя контактами, включенными последовательно в цепь управления OI OHчанием цикла: контактом 24, нормално разомкнутым под напряжением, и нормально замкнутым контактом 24, срабатывающим с задержкой после возбуждения обмотки 24 реле;
реле 26 окончания циклаг управляющее четырьмя контактами: нормально разомкнутым контактом 26, включенным последовательно с обмоткой 24 или с обмоткой 23, нормально разомкнутым контактом 26 и нормально замкнутыми контактами 26 и 26j
реле 27 памяти окончания цикла, содержащее обмотку блокировки 28, включенную последовательно с контактом 26 и обмотку разблокировки 29, включенную последовательно с контактом 26j. Реле 27 запоминает информацию об окончании его цикла, его обмотка блокировки 28 управляет тремя контактами: нормально замкнутым контактом 28 у , включаемым последовательно с контактом 14 или с контактом цепи управления выходом электрокара, и контактами 28д и 28 (см.фиг.З), которые по окончании цикла непосредственно подключают фазы Б и В к фазам Б и В соответственно;
реле 30 задержки (0,30 с) (см. фиг.4) в цепи исходного положения электрокара,включенное последовательно с контактами 28, 14|, 15. Это реле управляет контактом 30 (см.фиг.ЗУ, нормально разомкнутым под напряжением, срабатывающим с задержкой 0,30 с после возбуждения реле и включенным последовательно с фазой Вис одним из контактов 16 и 16g
реле 31 с задержкой также 0,3 с в цепи окончания выхода электрокара
ключенное параллельно реле 30. Это реле управляет нормально замкнутым контактом 31у, срабатывающим с заержкой после отпускания реле 31 и включенным последовательно с контактом 26 в цепь обмотки 28, и реле с задержкой 32 для запоминания команды ручного обратного хода, оно имеет задержку О,7 с и управляет пятью контактами: нормально замкнутым контактом 32у и нормально разомкнутым контактом 32, которые связаны с реверсором 13, нормешьно замкнутым контактом 32д (см.фиг.3), включенным параллельно нормальному разомкнутому контакту 32, срабатывающему с задержкой после возбуждения реле, в цепь фазы А, и нормально разомкнутым контактом 315f подключенным параллельно контакту 30 {см.фиг.3) .
Неподвижные цепи содержат также ручные или дистанционные переключатели управления рабочим циклом: переключатель 33 для запуска цикла движения влево по центральному проходу, переключатель 34 для запуска цикла движения вправо по центральному проходу, переключатель 35 ручного управления обратным ходом электрокара, переключатель 36 управления цепью выхода электрокара и выключатель 37, включенный последовательно с целью выхода и замыкающийся автоматически при подаче напряжения 380 В цепь питания, при этом цепь управления (см.фиг.4) работает на однофазном напряжении 110 В.
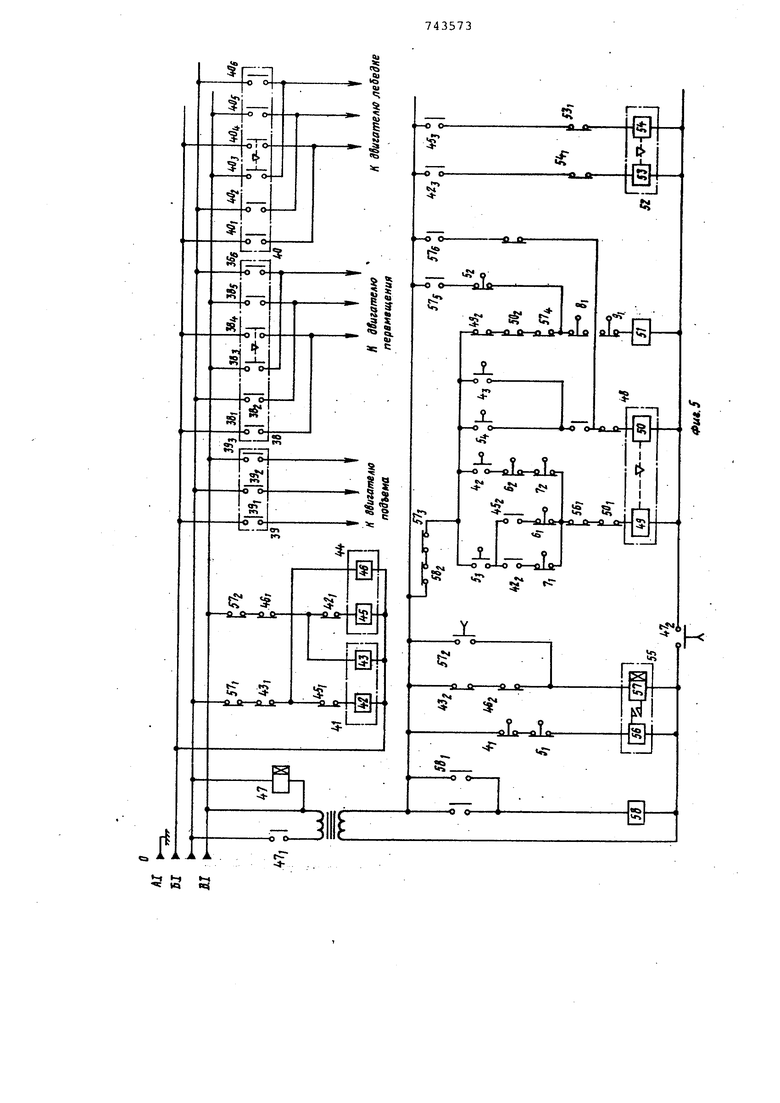
Цепи находящиеся на электрокаре и называемые подвижными цепями (см.фиг.5), содержат: группу контактов , управляющих питанием двигателей электрокара трехфазным напряжением 380 В; цепь управления этими контактами, содержащая одну часть, которая работает от двух фаз напряжением питания 380 В, и другую часть, работающую на напряжении 110 в и питающуюся через трансформатор.
Электрокар имеет три трехфазных двигателя:
двигатель перемещения,который вращается последовательно в обоих направлениях при каждом цикле.Поскольку порядок подключения фаз при каждом цикле устанавливается коммутатором 16 (см.фиг.3), двигатель перемещения запитывается через многоканальный реверсор 38 (см.фиг.5), «Содержащий две группы из трех контактов 38у-38з, 38 if- 38, при этом . одна группа осуществляет прямое соединение фаз А-А, Б-Б, В-в; а другая группа меняет местами фазы Б и В, положение первой группы соответствует .удалению электрокара от платформы, или выходу, а положение второй группы - его входу или обратному ходу.
двигатель подъема, подключаемый через строенный контакт 39 с контактами 39 39 . Платформа 3 приводится в действие группой эксцентриковых кулачков, профиль каждого из которых имеет ось симметрии, проходящую через центр вращения кулачка, эти кулачки могут приводиться во вращение как в одну, так и в другую сторону; двигатель, связанный с лебедкой,
представляет собой двигатель повышенного скольжения, порядок включения фаз питания которого при отсутствии момента сопротивления всегда будет соответствовать одному и тому же
направлению вращения, а именно направлению наматывания кабеля. Поскольку имеются два возможных порядка включения фаз питания Б и В (см. фиг.З), этот двигатель запитывается через многоканальный реверсор 40
с контактами 40y-40(j , управление которым косвенно осуществляет реверсор 13 влево-вправо (см.фиг.4),
запомингиощее реле 41 цикла движения влево, содержащее обмотку блокировки 42 и обмотку разблокировки 43, управляющие соответственно нормально замкнутым контактом 42 и нормально разомкнутыми контактами 42 и одной стороны, и
нормально замкнутыми контактам 43 и 43 с другой стороны,
симметричное ему запоминающее реле 44 с двумя обмотками 45 и 46, управляющими контактами 45у , 45, 45.,, 46г, 46,
реле 47 задержки (1 с), управляющее нормально разомкнутым контактом 47у и контактом 47,, срабатывающим с задержкой (1 с) после возбуждения реле;
контакты 4 (нормально замкнутый), 4 и 4з (нормально разомкнутые), срабатывающие от датчика 4 (см. фиг.1);
контакты 5 и 5 (нормально разомкнутые) и 5, , нормально разомкнутые, срабатывающие от датчика 5,
реле 48 изменения направления перемещения с механической блокировкой, содержащее две обмотки 49 и50, каждая из которых управляет соответственно двумя нормально замкнутыми контактами 50, 50 и 49, 49 с одним разрывом и одной из групп контактов реверсора 38;
реле 51, управляющее контактом 39 двигателя подъема и нормально замкнутым контактом
реверсор 52 с механической блокировкой, содержащий две обмотки 53, 54, управляющие выключателями 53/ и 54у, нормально замкнутыми под напряжением, и реверсором 4-0;
запоминающее реле 55 с задержкой,
содержащее обмотку блокировки 56, включенную последовательно с контак тами 4 f и 5 / и обмотку разблокировки 57 с задержкой. Обмотка 56 управляет нормально замкнутым контактом 56, включенным последовательно с обмоткой 49 реле 48, и нормально разомкнутым контактом 56, включенным последовательно с обмоткой 50 того.же реле. Обмотка 57 реле 55 управляет сем контактами; нормально замкнутыми контактами 57f и 57, включенными последовате но с обмотками 42 и 45 соответствен но; нормально замкнутым контактом 57 являющимся общим контактом цепей реле 4 8 и 51; еще одним замкнутым контактом 57j и двумя нормально разомкнутыми контактами 575- и 5 7 в цепях управ ления перемещением и подъемом; контактом 57, срабатывающим с задержкой после возбуждения обмотки 57 и нормально разомкнутым под напряжением, нормально замкнутые контакты б/ и 6, срабатывающие от щупа 6, и контакты 7 и 7, , срабатываклцие от щупа 7 (см.фиг.1); нормально замкнутые контакты 8 и 9, срабатывакмцие от датчиков 8 и Схрма содержит также реле 58 с контактами 58у и 58 общего размыка ния, возбуждаемое и блокируемое при возникновении неисправности, при этом возбуждение обеспечивается за счет замыкания нормешьно разомкнуто выключателя при помощи защитного реле (на чертеже .не показано), а блокировка - за счет замыкания контакта 58, управляемого реле 58.Пр этом контакт 58 размыкается,разрывая цепи питания двигателей подъема и перемещения. Автоматическая работа схемы,обес печиваемая за счет связи меяаду различными реле и контактами, будет более подробно описана ниже для слу чая цикла разгрузки, цикла загрузки и обратного хода при ручном управле Цикл разгрузки. Для конкретности предполагают, что тележка должна забрать груз, находящийся в коридор слева от центрального прохода. Исход ное положение: тележка находится на средстве 2, концевые контакты 12f, 12 находятся в рабочем положе нии, реле 23 заблокировано. Датчики 8 и 9 находятся в рабочем положении разрывая цепь реле 51 (см.фиг.5). Концевой контакт 5 находится в рабочем положении. Концевые датчики 6 и 7 свободны. Выключатель 33 управления циклом движения влево включается вручную или дистанционно в зависимости от рассматриваемой системы. Замыкание переключателя 33 вызывает блокировку реле 20 и возбуждение реле 17. Последнее обеспечивает установку реверсора 13 влево-вправо в положение влево (обмотка 14 запитывается через контакт 17 } . Коммутатор 16 фаз устанавливается в положение 16, l, 16j. Реле 30 с задержкой возбуждается и вызывает замыкание контакта 30/ с запаздыванием 0,3 с (см.фиг.6), ка которой изображены моменты переключения цепей, обозначения которых указаны слева от различных линий, фаза В, подключается к фазе В по истечении 0,3 с после подключения фаз А , А г Б к фазам А и Б. В течение этих 0,3 с .блокируется обмотка 42 реле 41 (см.фиг.5),цепь возбуждения которого подключена к фазам А и Б. При подключении фазы В возбуждается реле 47 (см.фиг.5), что позволяет по истечении 1 с возбудить обмотку 49 реле 48,обмотку 53 реверсора 52 за счет замыкания кс(нтакта в результате чего реверсоры 38 и 40 устанавливаются в соответствующие положения, а двигатель перемещения и двигатель лебедки запитываются фазами А, Бу, В, подключенными соответственно к фазам А,Б,В. Двигатель перемещения перемещает электрокар влево. При этом освобождается контакт 12jj, вызывеиощий разблокировку запоминающего реле 23. Перемещение электрокара влево продолжается до тех пор, пока щуп 7 не обнаружит груз или поддон, в результате чего, за счет размыкания контакта 7/, разрывается цепь возбуждения обмотки 49. Питание двигателя перемещения прекращается. Тележка останавливается под поддоном. Поскольку ни одна из обмоток 49 и 50 не возбуждена, срабатывает реле 51, обеспечивая запитку двигателя подъема тремя фазами Ау, Б, В, подключенньюш соответственно к фазам А,Б,В. Освобождается концевой контакт 5. При этом концевой датчик 4 еще не срабатывает, и блокируется запоминающее реле 55. При установке платформы в верхнее положение контакт 4 .размыкается, и реле 48 вход-выход устанавливается в положение запитывания обмотки 50, размыкая контакт 50 . Б результате разрывается питание двигателя подъема, при этом с реле 51 снимается напряжение . Поскольку фазы питания Б и В двигателя перемещения меняются местами. Последний вращается в противоположном направлении, возвращая электрокар к вспомогательному транспортному средству 2. При возвращении электрокара 1 в исходное положение срабатывает датчик 12. При этом обмотка 24 вызывае замыкание контакта 24 в течение 1с, и возбуждаемое в результате эт го реле 26 (см.фиг.4) обеспечивает с помощью внешней системы (на черте же не показана) снятие команды цикла движения влево. При этом происходит разблокировк реле 20 и 19, и реверсор 13 возвращается в исходное по;1ожение. По истечении времени задержки реле 31 к электрокару подключаются фазы Б и В через обмотку 28 в течение 0,7 с (1с задержки реле 25 минус 0,3 с задержки реле 31). Это время позволяет разблокирова .запоминающее реле 55, поскольку цеп юбмотки 56 разрывается контактом 4 а цепь обмотки 56 замыкается контак Тс1ми 43, и 46;} , которые не срабатывают при отсутствии третьей фазы. В течение этого промежутка времени 0,7 с контакты двигателей не могут замкнуться, поскольку контакт 46 срабатывает с задержкой 1 с. Цикл загрузки. Для конкретности предполагают, что теперь уже загруженная тележка должна установить поддон в коридоре, находящемся спра ва от центрального прохода. Исходное состояние.Поскольку -тележка находится на вспомогательном транспортном средстве, контакт 12 замкнут, а контакт 12 разомкнут. Датчики 8 и 9 находятся в рабочем положении. Датчики 6 и 7 освобождены. Датчики 4 на ходятся в рабочем положении, поскольку тележка, будучи загруженной, установлена в верхнее положение.. Включается переключатель 34, в результате чего возбуищаются реле 18, 21 запоминающего реле 19 и реле 15 реверсора 13. Реле 15, замыкая контакт 15, возбуждает обмотку 29; теперь уже с задержкой 0,3 с по отношению к фазам А и В подключается фаза 5. В течение этих 0,2с запоминающе реле 41, которое было заблокировано при предыдущем движении, разблокиру ется при помощи обмотки 43, и блоки руется реле 44. По истечении времени 1 с,за сче замыкания контакта 19г, возбуждаетс бмотка 49 реле 48 перемещения, а также обмотка 54 реверсора 52 ле бедки, при этом за счет блокировки реле 45 замыкается контакт 45з. При этом двигатель перемещения вращается в таком направлении, при котором электрокар начинает двигать ся вправо. Двигатель лебедки вращается всегда в одну и ту же сторону поскольку порядок включения фаз менялся дважды по .отношению к предшествующему случаю, один раз коммутатором 16 и один раз реверсором 38 при управлении от обмотки 54. Когда датчик 7 обнаруживает поддон, он размыкает цепь обмотки 49, в результате чего двигатель перемещения останавливается. При этом возбуждается реле 51 (замыкается контакт 9), и двигатель подъема запитывается в обратном порядке. Верхние концевые контакты устанавливаются в нерабочее положение, в результате чего возбуждается реле 51. При установке подъемной платформы в нижнее положение срабатывают датчики 5. При этом-через контакт 5if возбуждается обмотка 50,и электрокар начинает перемещаться в обратном направлении до срабатывания датчика 12, возбуждающего реле 26. При этом разрывается переключатель 34. Разблокировка обмотки 56 осуществляется так же, как в предыдущем случае. Переключатель 36 с внешним управлением препятствует возбуждению реверсора 13 в случае какого-либо маневра, запрещающего перемещение электрокара относительно ее несущей платформы (например, в процессе перемещения вспомогательного трансоюртного средства). С другой стороны, реле 30 с задержкой возбуждается .только в том случае, если выключатель 37,отображающий наличие напряжения 380 В, Зс1мкнут. Если имел место разрыв,то независимо от того, было ли реле 30 возбуждено в этот момент или нет, размыкание выключателя 37 возвращает его в невозбужденное состояние, если это реле в нем не находилось, и после восстановления протекания тока цикл подключения фаз будет автоматически разворачиваться обычным образом, т.е. с задержкой подключения одной из фаз по отношению к подключению двух других. Случай ручного управления обратным ходом. Этот случай имеет место тогда, когда вводят специальную команду, предназначенную для возвращения электрокара в исходное положение при любом положении этого последнего в момент ввода команды, что делается в случае какого-либо.нарушения-в работе . При возникновении нарушения общее реле 58 (см.фиг.5) автоматически останавливает электрокар. При обнаружении неисправности трехвазное питание, а также управление движением влево (переключатель 33) или вправо (переключатель 34) отключаются либо вручную, если неисправность обнаружена визуально, либо автоматически в случае слишком большого времени цикла. После восстановления питания используют команду ручного возврата с помощью переключателя 35, которая обеспечивает возбуждение реле 32, При этом предьщущая команда запоминается одним из реле 19 и 20, контакт 32 размыкается а контакт 32, замыкаясь, переводит реверсор 13 в положение включения реле 14 или 15 посредством контакта 222 или 212, управляемого запоминающим реле 20. Фазы Б и В подводятся к электрокару одновременно, тогда как фаза А подключается через 0,7 с по истечении времени задержки реле 32 (см.фиг.1). Фазы Б и В сразу же обеспечивают возбуждение обмотки 57 (см.фиг.5), поскольку 43 и 46 не находятся под напряжением. Обмотка 57 самоблокируется по истечении 0,3 с.Обмотки 42 и 45 запоминающих реле 41 и 44 остаются в том положении, в котором они находились до возникновения неисправности. После подключения фазы А и замыкания контакта 47 осуществляются следующие перемещения: опускание платформы, если она еще не находится в нижнем положении и не сработал ни один из датчиков 8 9 (см.фиг.2); возвращение по окончании подъема (обмотка 50 возбуждена); вращение двигателя лебедки в ту же сторону, что и до возникновения неисправности. Цикл завершается нормальным перемещением. Изобретение может быть использовано на самоходных электрокарах с автоматическим циклом любого типа ;независимо от типа подъемных средст Формула изобретения 1. Устройство для дистанционного управления электрокаром, снабженным платформой для установки груза с подъемником и двигателями передвиже ния кара в двух направлениях и подъ ема платформы, содержащее датчики ложения кара и наличия груза, пуль управления и размещенные в нем ист ник трехфазного питания с коммутат ром -фаз, выполненные на реле |блок приема сигналов датчиков поло жения и блок выработки управляющих 1команд, и размещенные на каре двигатели подъемника и перемещения кара, подключенные через прерыватели, блоки передачи и приема информации от датчиков, релейные блоки выработки управляющих сигналов для двигателей и канал связи между пультом управления и двигателями, выполненный в виде многожильного кабеля, отличающееся тем, что, с целью упрощения канала связи путем сокращения числа проводников в кабеле, устройство снабжено установленным на пульте управления реле задержки, обмотка которого включена между двумя фазами, а контакт включен в один из фазовых проводников последовательно с коммутатором фаз, реле памяти центровки кара, реле памяти управляющих сигналов для работы Справа или слева относительно центра коридора, по которому перемещается кар, реле блокировки и реверсирования, и установленными на каре реле памяти направления перемещения кара и реле памяти возврата кара, реле с задержкой возбуждения вышеуказанных реле, включенными в цепь питания через его замыкающий контакт, реле управления прерывателями цепей питания двигателей,обмотки которых включены в цепь питания через контакты реле памяти, и блоком окончания цикла работы, включающим в себя реле окончания цикла, обмотка которого включена последовательно с замыкающими контактами реле памяти центровки кара, и реле памяти окончания цикла, втягивающая обмотка которого включена последовательно с замыкающим контактом реле окончания цикла, а обмотка возврата - последовательно с его размыкающим контактом. 2. Устройство по П.1, о т л ичающе-еся тем, что оно снабжено блоком ручного ввода управляющих сигналов на возврат кара, включа:ощим в себя установленные в пульте управления реле выдержки времени с одним контактом с выдержкой и двумя без вьщержки времени,причем контакт с вьщержкой включен в цепь фазы, порядок включения которой не меняется, а два других - в цепи фаз, .подключаемых с задержкой времени, и установленным на каре реле вы;цержки времени, подключенным к двум фазам,порядок включения которых может меняться. Источники информации, принятие во внимание при экспертизе 1. Патент Франции № 1553010, кл. В 65 G 1/00, 23.11.67 (прототип).
255
W te
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| ГИДРОПЕРЕДАЧА ТРАНСПОРТНОЙ МАШИНЫ | 2000 |
|
RU2185968C2 |
| СИНХРОНИЗАТОР ДЛЯ ОЗВУЧИВАНИЯ ФИЛЬМОВ | 1966 |
|
SU216449A1 |
| СБОРОЧНАЯ ЛИНИЯ | 1991 |
|
RU2028910C1 |
| Устройство для блокировки коммутационного аппарата в цепи питания электроустановки | 1974 |
|
SU634418A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| ТЕЛЕГРАФНЫЙ МНОГОПРОВОДНЫЙ КОММУТАТОР | 1971 |
|
SU294262A1 |
| Устройство для точечной электродуговой сварки плавящимся электродом | 1989 |
|
SU1632676A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОСТАНОВКИ | 1968 |
|
SU213609A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГОРОЧНЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2318692C1 |