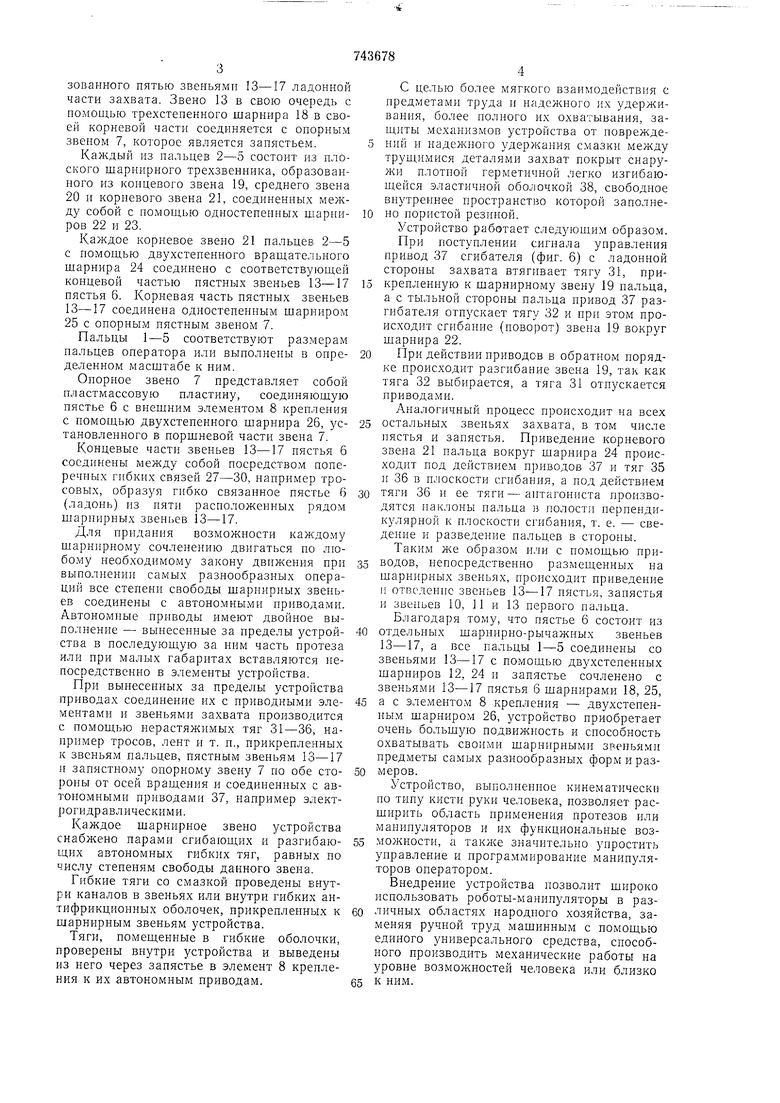
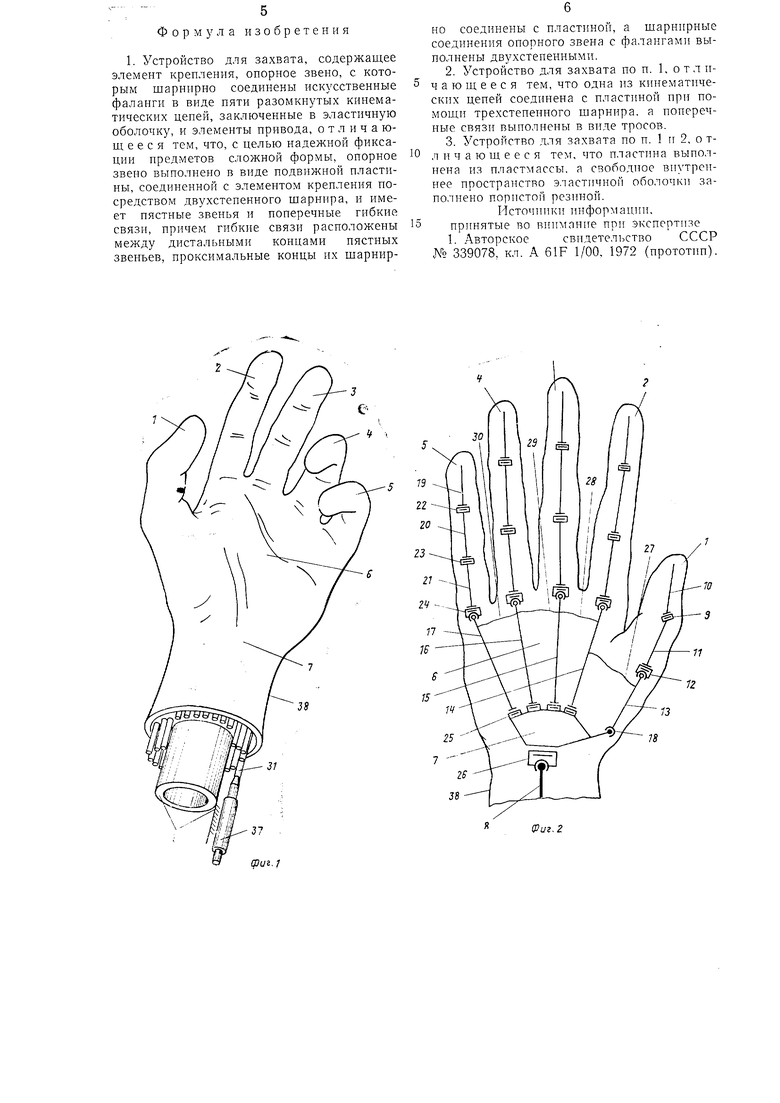
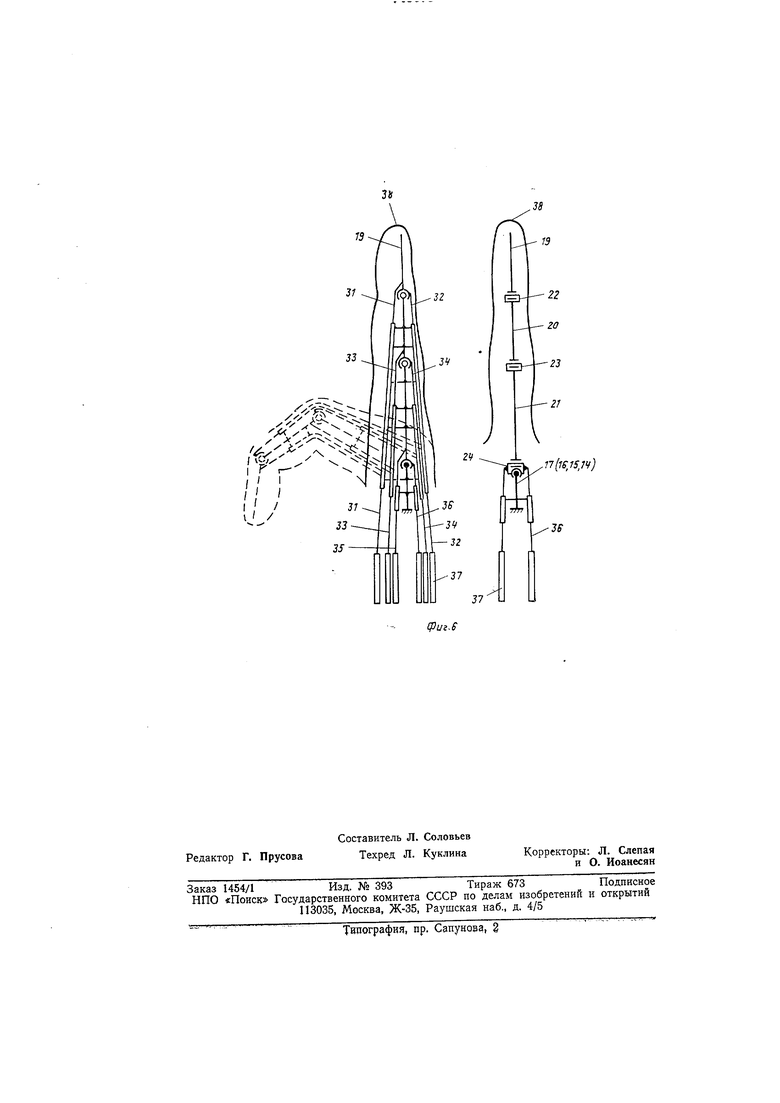
зованного пятью звеньями 13-17 ладонной части захвата. Звено 13 в свою очередь с номоидью трехстепенного шарнира 18 в своей корневой части соединяется с оиорным звеном 7, которое является запястьем. Каждый из пальцев 2-5 состоит из плоского шарнирного трехзвенника, образованного из концевого звена 19, среднего звена 20 и корневого звена 21, соединенных между собой с помощью одностепенных шарниров 22 и 23. Каждое корневое звено 21 пальцев 2-5 с помощью двухстепенного врашательного шарнира 24 соединено с соответствуюш,ей концевой частью пястных звеньев 13-17 пястья 6. Корневая часть пястных звеньев 13-17 соединена одностепенным шарниром 25 с опорным пястным звеном 7. Пальцы 1-5 соответствуют размерам пальцев оператора или выполнены в определенном масштабе к ним. Опорное звено 7 представляет собой пластмассовую пластину, соединяющую пястье 6 с внешним элементом 8 крепления с помощью двухстепенного шарнира 26, установленного в поршневой части звена 7. Концевые части звеньев 13-17 пястья 6 соединены между собой посредством поперечных гибких связей 27-30, например тросовых, образуя гибко связанное пястье б (ладонь) из пяти расположенных рядом шарнирных звеньев 13-17. Для придания возможности каждому шарнирному сочленению двигаться но любому необходимому закону движения при выполнении самых разнообразных операций все степени свободы шарнирных звеньев соединены с автономными приводами. Автономные приводы имеют двойное выпо;1ненпе - вынесенные за пределы устройства в последующую за ним часть протеза или при малых габаритах вставляются непосредственно в элементы устройства. При вынесенных за пределы устройства приводах соединение их с приводными элементами и звеньями захвата производится с помощью нерастяжимых тяг 31-36, например тросов, лент и т. п., прикрепленных к звеньям пальцев, пястным звеньям 13-17 и запястному опорному звену 7 по обе стороны от осей вращения и соединенных с автономными приводами 37, например электрогидравлическими. Каждое шарнирное звено устройства снабжено парами сгибающих и разгибающих автономных гибких тяг, равных по числу степеням свободы данного звена. Гибкие тяги со смазкой проведены внутри каналов в звеньях или внутри гибких антифрикционных оболочек, прикрепленных к шарнирным звеньям устройства. Тяги, помещенные в гибкие оболочки, проверены внутри устройства и выведены из него через запястье в элемент 8 крепления к их автономным приводам. 743 5 10 15 20 25 30 35 40 45 50 55 60 55 8 С целью более мягкого взаимодействия с предметами труда и надежного их удерживания, более полного их охватывания, защиты механизмов устройства от повреждеиий и надежного удержания смазки между трущимися деталями захват покрыт снаружи плотиой герметичной легко изгибающейся эластичной оболочкой 38, свободное внутреннее пространство которой заполнено пористой резиной. Устройство работает следующ,им образом. При поступлении сигнала управления привод 37 сгибателя (фиг. 6) с ладонной стороны захвата втягивает тягу 31, прикреплениую к шарнирному звену 19 пальца, а с тыльной стороны пальца привод 37 разгибателя отпускает тягу 32 и при этом происходит сгибание (поворот) звена 19 вокруг щарнира 22. При действии приводов в обратном порядке происходит разгибание звена 19, так как тяга 32 выбирается, а тяга 31 отпускается приводами. Аналогичный процесс происходит на всех остальных звеньях захвата, в том числе пястья и запястья. Приведение корневого звена 21 пальца вокруг шарнира 24 происходит под действием приводов 37 и тяг 35 и 36 в илоскости сгибания, а под действием тяги 36 и ее тяги-антагониста производятся наклоны пальца н полости перпендикулярной к плоскости сгибания, т. е. - сведение и разведение пальцев в стороны. Таким же образом или с иомощью приводов, непосредственно размещенных на щарнирных звеньях, происходит приведение и отвелеиис звеньев 13-17 пястья, запястья и звеньев 10, И и 13 первого пальца. Благодаря тому, что пястье 6 состоит из отдельных щарпирио-рычажных звеньев 13-17, а все пальцы 1-5 соединены со звеньями 13-17 с помощью двухстепенных шарниров 12, 24 п запястье сочленено с звеньями 13-17 пястья б шарнирами 18, 25, а с элементом 8 крепления - двухстепенным шарниром 26, устройство приобретает очень большую подвижность и способность охватывать своими шарнирными звеньями предметы самых разнообразных формиразмеров. Устройство, выполненное кинематически по типу кисти руки человека, позволяет расширить область применения протезов или манипуляторов и их функциональные возможности, а также значительно упростить управление и программирование манипуляторов оператором. Внедрение устройства позволит широко использовать роботы-манипуляторы в различных областях народного хозяйства, заменяя ручной труд машинным с помощью единого универсального средства, способного производить механические работы на уровне возможностей человека или близко к ним.
Формула изобретения
1. Устройство для захвата, содержащее элемент крепления, опорное звено, с которым шарнирно соединены искусственные фаланги в виде пяти разомкнутых кинематических цепей, заключенные в эластичную оболочку, и элементы привода, отличающееся тем, что, с целью надежной фиксации иредметов сложной формы, опорное звено выполнено в виде подвижной пластины, соедииенной с элементом крепления посредством двухстепенного шарнира, и имеет пястные звенья и поперечные гибкие связи, причем гибкие связи расположены между дистальными концамн пястных звеньев, проксимальные концы их шарннрно соединены с пластиной, а шарнирные соединения опорного звена с фалангами выполнены двухстепенными.
2.Устройство для захвата по и. 1, о т л нчающееся тем, что одна из кинематических цепей соединена с пластиной при помощи трехстепенного шарнира, а поперечные связи выполнены в впде тросов.
3.Устройство для захвата но п. 1 и 2, о тл и ч а ю щ е е с я тем, что пластина выполнена из пластмассы, а свободное внутреп гее пространство эластичной оболочки заполнено порнстой резиной.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 339078, кл. А 61F 1/00, 1972 (прототпп).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механотерапии кисти | 1987 |
|
SU1426582A1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ХВАТА, СОДЕРЖАЩЕЕ ВСТАВКУ | 2018 |
|
RU2765078C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| ФУНКЦИОНАЛЬНЫЙ ПРОТЕЗ ПАЛЬЦА РУКИ | 2020 |
|
RU2760258C1 |
| Устройство для разработки движения и суставов верхней конечности | 2021 |
|
RU2766788C1 |
| Устройство для восстановления функции четырех пальцев кисти | 2023 |
|
RU2818447C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2011 |
|
RU2468413C2 |
| ОРТЕЗ ДЛЯ ПОДДЕРЖАНИЯ СУСТАВА В СОСТОЯНИИ ПОКОЯ | 2018 |
|
RU2782415C2 |
| Шина для лечения переломов пальцев руки | 1932 |
|
SU36591A1 |
75
w
)
(риг.З
Фиг, f
,)
3S
