1
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано в системах управления движением кабины грузового и пассажирского подъемников.
Известно устройство для управления приводом лифта, содержащее коитролирующий элемент и преобразователь механического давления в электрический сигнал, воздействующий на двигатель привода лифта в моменты его пуска и остановки 1.
В известном устройстве предусмотрено наличие гибкого элемента, например троса, имеющего строго определенный вес одного погонного метра, а также значительную величину провиса, что связано с необходимостью предусмотреть свободиое перемещение в щахте лифта кабины, противовеса и гибкого элемента. Это требует увеличения габаритов шахты, что, в свою очередь, снижает величину полезной (жилой) площади зданий.
Кроме того, известное техническое решение имеет сложиую электрическую схему, включающую в себя источник опорного напряжения, узел сравнения, систему усилителей и т.д., и может быть размещено только
в верхней части щахты, что снижает коэффициент использования лифта в зданиях с плоскими крыщами и узкими потолочными помещениями, а .также снижает долговечность устройства.
5 Цель изобретения - повыщение долговечности устройства.
Для этого контролирующий элемент выполнен в виде подвижного полукруга, взаимосвязанного с кабиной лифта посредством зубчатой передачи, троса и щкива, а преобразователь механического давления в электрический, сигнал содержит систему подпружиненных магнитоупругих датчиков с вмонтированными в них роликами передачи давления, взаимодействующими с подвижным полукругом.
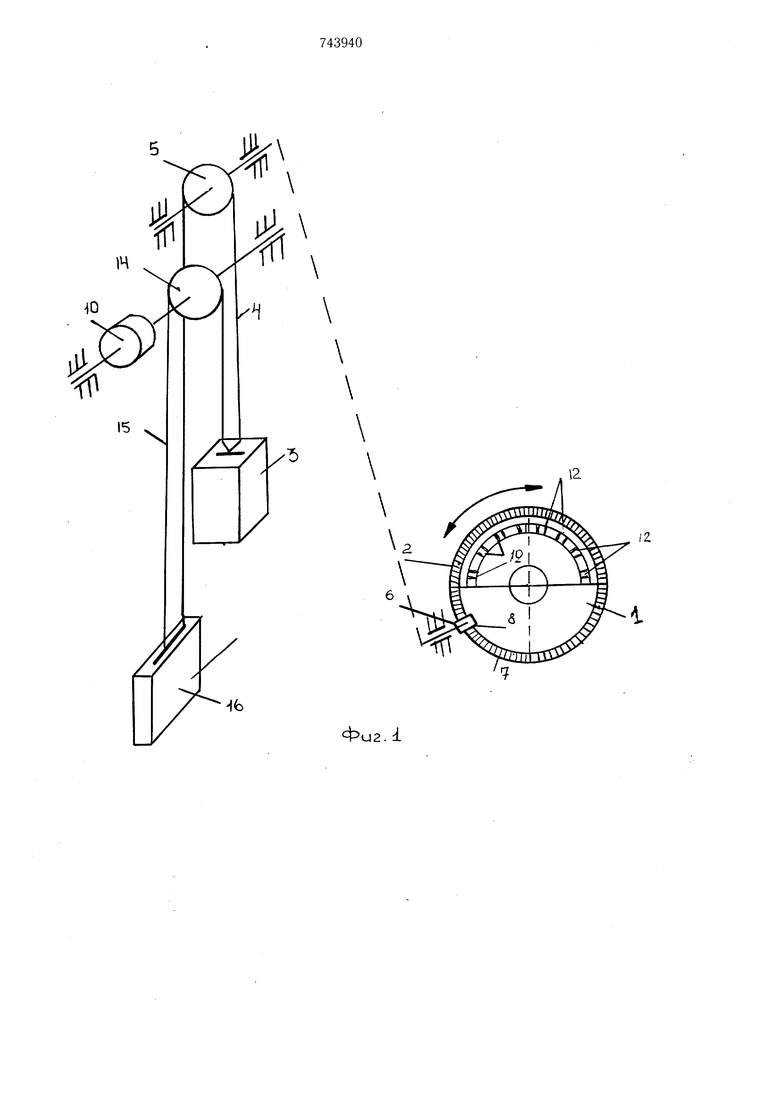
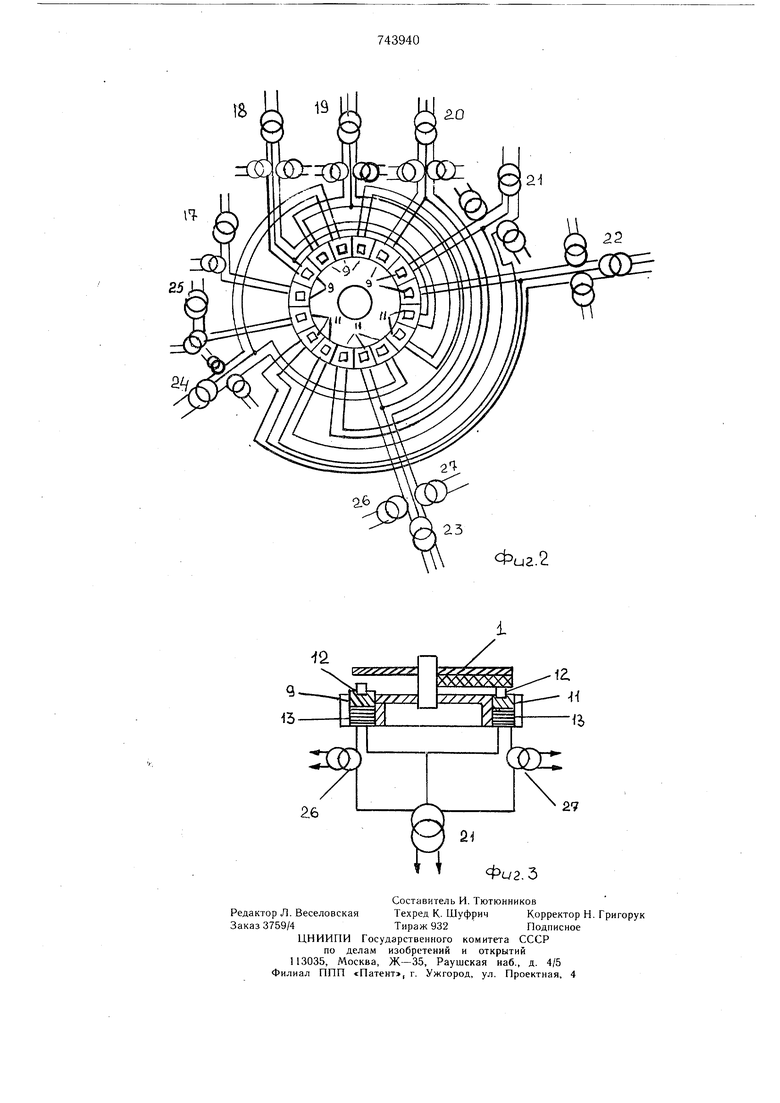
На фиг. 1 изображено устройство для управления приводом лифта, общий вид; на фиг. 2 - принципиальная электрическая схема устройства на девять остановок кабины; на фиг. 3 - мостовая электрическая схема двух магнитоупругих датчиков одной остановки.
Устройство для управления приводом лифта содержит следящую систему, состоящую из контролируемого элемента 1 и преобразователя 2 механического давления в электрический сигнал. Контролирующий элемент 1 выполнен в виде подвижного металлического полукруга, связанного с кабиной 3 лифта при помощи троса 4, шкива 5 и шестеренчатого зацепления 6, состояндего из ведомой 7 и ведущей 8 шестерен. Преобразователь 2 механического давления в электрический сигнал включает в себя систему подпружиненных магнитоупругих датчиков, из которых одни датчики 9 под воздействием механического давления полукруга формируют достаточный по величине сигнал управления двигателем 10, что обеспечивает перемеш.ение кабины лифта только вниз, другие датчики 11 при тех же условиях управляют работой двигателя 10 и обеспечивают асреме11;.енпе кабины 3 только вверх. Po;iM Ui 12 служат для передачи давления подвижного полукруга на подпружиненные датчики 9 и 11, а также уменьшают трен.ме при вращении полукруга. Положение контролирующего элемента такое, что все датчики 11 находя.ся под механическим давлением полукруга за счет сжатой пружины 13, а все датчики 9 не испытывают дав ления полукруга. Это положение контроляруюнхего элемента соответствует положению кабины 3 на первой (самой нижней) останов ке. Привод кабины 3 лифта включает в себя электродвигатель 10, шкив 14, трос 15. противовес 16. Принципиальная электрическая схема устройства на девять остановок кабины включает в себя трансформаторы 17-25, вторичные обмотки которых (кроме 17-го и 25-го) в свою очередь имеют в нагрузке две обмотки .магнитоупругих датчиков 9 и 11 и два трансформатора связи 26 и 27 с выходными напряжениями U и U а, значения которых зависят от магнитной проницаемости сердечников в датчиках 9 и 11. Устройство работает следующим образом, При нажатии кнопки (на чертеже не показана) выбранной остановки обмотка одного из трансформаторов 17-25, напри.мер 21, через ста(щию управления лифтом (начертеже не показана) подключается к источнику напряжения. Поскольку магнитоупругий датчик 11 находится под воздействием механического давления полукруга 1 (фиг. 3), то сопротивление току в обмотке датчика 11 больше сопротивления в обмотке датчика 9, следовательно, на вторичной обмотке трансформатора связи 26 напряжение U j больше, чем напряжение вторичной обмотке трансфор.матора 27, и достаточно для пуска двигателя 10 в заданном направлении с целью перемещения кабины. Посредством системы привода, включающий в себя шкив 14,трос 15 и противовес 16, кабина 3 начинает свое движение. Перемещение кабины посредством троса 4, щкива 5 и шестеренчатого зацепления 6, состоящего из ведущей 7 и ведомой 8 шестерен, вызывает вращение полукруга 1, которое копирует в заданном масштабе перемещение кабины 3. Полукруг 1 при своем вращении на роликах 12, вмонтированных в магнитоупругие датчики, достигает положения, при котором он оказывает механическое давление на подпружиненный магнитоупругий датчик 9. Выходное напряжение U i на вторичной обмотке трансформатора 26 уменьшается до величины, недостаточной для управления работой двигателя 10. Двигатель останавливается. Это соответствует положению кабины 3 на остановке, выбранной при помощи кнопки пуска. Одновременно останавливается контролирующий элемент (полукруг). Для возобновления движения кабины необходимо нажать соответствующую кнопку пуска. Использование в предлагаемом устройстве следящей системы, включающей контролирующий элемент в виде подвижного полукруга и преобразователь механического давления в электрический сигнал в виде системы подпружиненных магнитоупругих датчиков, позволяет разместить все устройстгю в любом месте шахты лифта, что дает возможность увеличить полезную площадь зданий, особенно зданий с плоскими крышами. Кроме того, предлагаемое устройство включает упрощенную электрическую схему, что увеличивает долговечность устройства. Формула изобретения Устройство для управления приводом лифта, содержащее контролирующий элемент и преобразователь механического давления в электрический сигнал, воздействующий на двигатель привода лифта в моменты его пуска и остановки, отличающееся тем, что, с целью повышения долговечности, контролирующий элемент выполнен в виде подвижного полукруга, взаимосвязанного с кабиной лифта посредством зубчатой передачи, троса и шкива, а преобразователь механического давления в электрический сигнал содержит систему подпружиненных магнитоупругих датчиков с вмонтированными в них роликами передачи давления., взаимодействующими с подвижным полукругом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2455877/29-11, кл. В 66 В 3/02 23.02.77.
15
Фи2. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом транспортирующего механизма | 1979 |
|
SU789367A1 |
| ЛИФТ С ЭЛЕКТРОПРИВОДОМ ПОДЪЕМА ЭЛЕКТРИЧЕСКИМ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2630011C2 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| ЛИФТ, ПРОТИВОВЕС КОТОРОГО ЯВЛЯЕТСЯ ТАКЖЕ ПЛУНЖЕРОМ ДВИЖУЩЕГО ГИДРОДИНАМИЧЕСКОГО УСТРОЙСТВА, КОТОРОЕ ГЕНЕРИРУЕТ И РЕГУЛИРУЕТ ЕГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2283811C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| Устройство и способ управления движением кабины лифта | 2015 |
|
RU2655257C1 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| Устройство для определения положения кабины лифта | 1977 |
|
SU622738A1 |