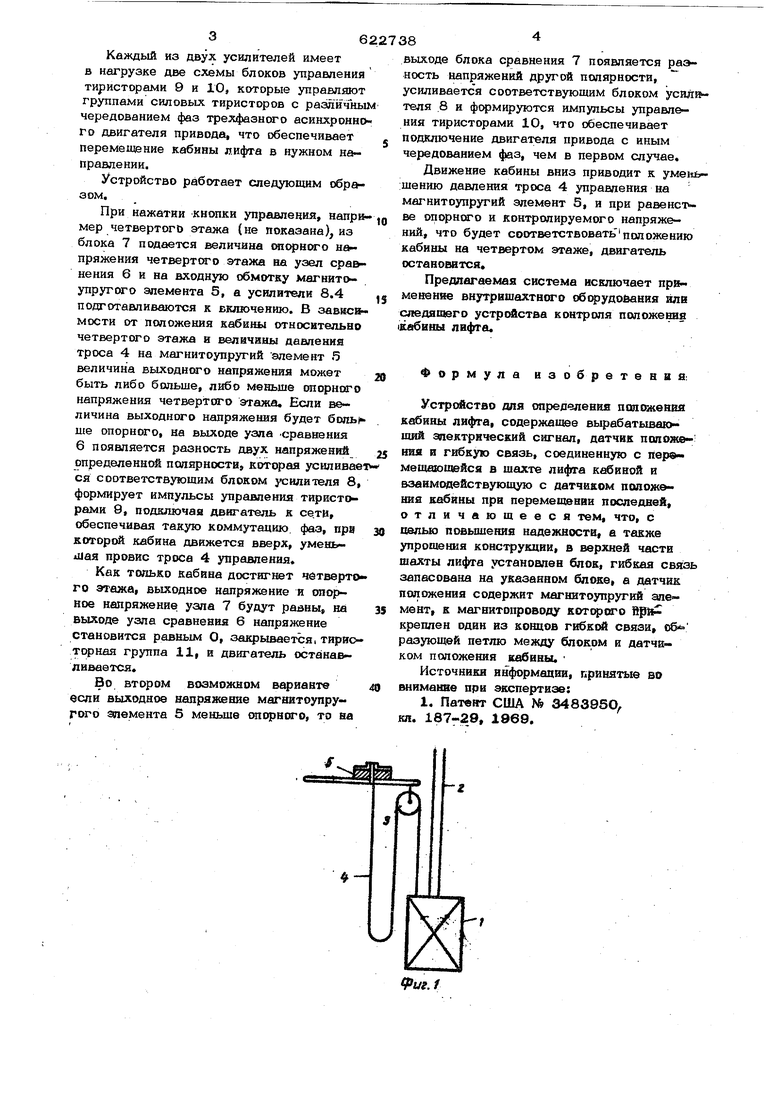
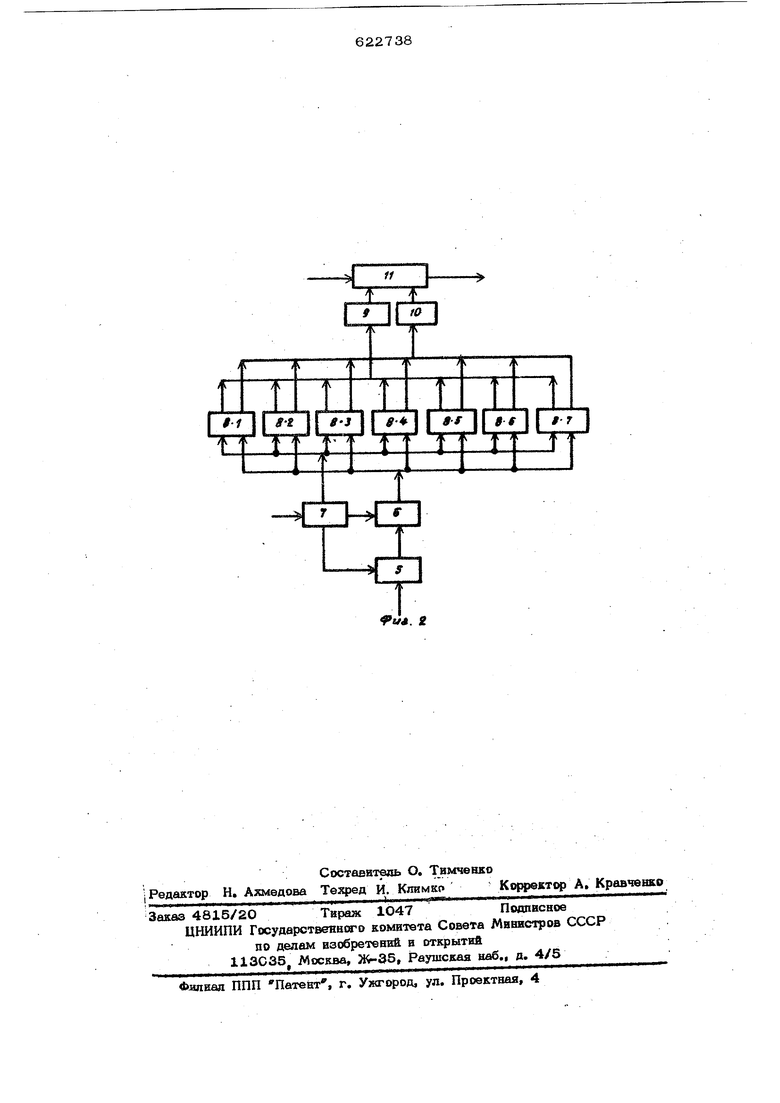
Каждый из двух усилителей имеет в нагрузке две схемы блоков управления тиристорами 9 и 10, которые управляют группами силовых тиристоров с различны чередованием фаз трехфазного асинхронно го двигателя привода, что обеспечивает перемещение кабины лифта в нужном направлении. Устройство работает следующим обр&зом. при нажатии кнопки управления, напр мер четвертого этажа {не показана), из блока 7 подается величина опорного напряжения четвертого этажа на узел сравнения 6 и на входную обмотку магнитоупругого элемента 5, а усилители 8.4 подготавливаются к включению. В зависямости от положения кабины относительнр четвертого этажа н величины давления троса 4 на магнитоупругий элемент 5 величина выходного напряжения может быть либо больше, либо меньше опорного напряжения четвертого этажа. Если величина выходного напряжения будет бо«ь ше опорного, на выходе узла .сравнения 6 появляется разность двух напряжений определенной псиярности, которая усиливае ся соответствующим блоком }силителя 8, формирует импульсы управления тиристорами 9, подключая двигатель к се.тв, обеспечивая такую коммутацию фаз, пр8 которой кабина движется вверх, уменьжИая провис троса 4 управления Как только кабина достигнет четверто го этажа, выходное напряжение и опорное напряжение узла 7 будут равны, на выходе узла сравнения 6 напряжение становится равным О, зaJфьmaeтcя, тиристорная группа 11, и двигатель останавливается. Во втором возможном варианте если выходное напряжение магнитоупругого элемента 5 меньше опорного, то на 6 8 выходе блока сравнения 7 появляется раэность напряжений другой полярности, усиливается соответствующим блоком усилителя 8 н формируются импульсы управл&ния тиристорами 10, что обеспечивает подключение двигателя привода с иным чередованием фаз, чем в первом случае. Движение кабины вниз приводит к уменьшению давления троса 4 управления на магнитоупругий элемент 5, и при равенс-гве опорного и контролируемого напряжений, что будет соответствоватьположению кабины на четвертом этаже, двигатель остановвтся. Предлагаемая система исключает примененве внутрвшахтного оборудо ния иле следящего устрсмКства кон1роля положения 1кабвны лвфта. Формула изобретеава: Устройство для определения попожеивя кабины лифта, содержащее вырабатывалащий электрический сигнал, датчик попожекия и гибкую связь, соединенную с перемещающейся в щахте лифгга кабиной и взаимсэдействующую с датчиком положанна кабины при перемещении последней, отличающееся тем, что, с целью повышения надежности, а также упрощения конструкции, в верхней частв шахты лифта установлен блок, гибкая свя:зь запасована на указанном блоке, а датчЕш положения содержит магнитоупругий элемент, к магнитопроводу котфого врй креплен одни из концов гибкЫ связи, об разующей петлю между блоком к датчиком положешгя кабины. Источники внформадш, принятые во вниманве при экспертизе: 1. Патент США N9 3483950 кн. 187-29, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом лифта | 1977 |
|
SU743940A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ ЛИФТА ОТ ПЕРЕГРУЗОК И АНОРМАЛЬНЫХ СОСТОЯНИЙ | 1997 |
|
RU2196719C2 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для управления приводом транспортирующего механизма | 1979 |
|
SU789367A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭТАЖА | 2010 |
|
RU2552376C2 |
| Устройство и способ управления движением кабины лифта | 2015 |
|
RU2655257C1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
CD GD GiD Ci GD Ga CHD
НГ .
JT
w«. 2
