Целью изобретения является увеличение эффективности при гашении меняющихся по амплитуде и частоте вибрационных составляющих.
Это достигается тем, что предлагаемый аморт/изатар снабжен оптимизаторами, входы которых подключены к выходу дополнительного динамометра, выходы соединены с соответствующими управляющими входами фазовых и амплитудных регуляторов, а электромеханические д инамометры установлены последовательно и разделены жесткой проставкой, скрепленной с рабочим органом вибратора.
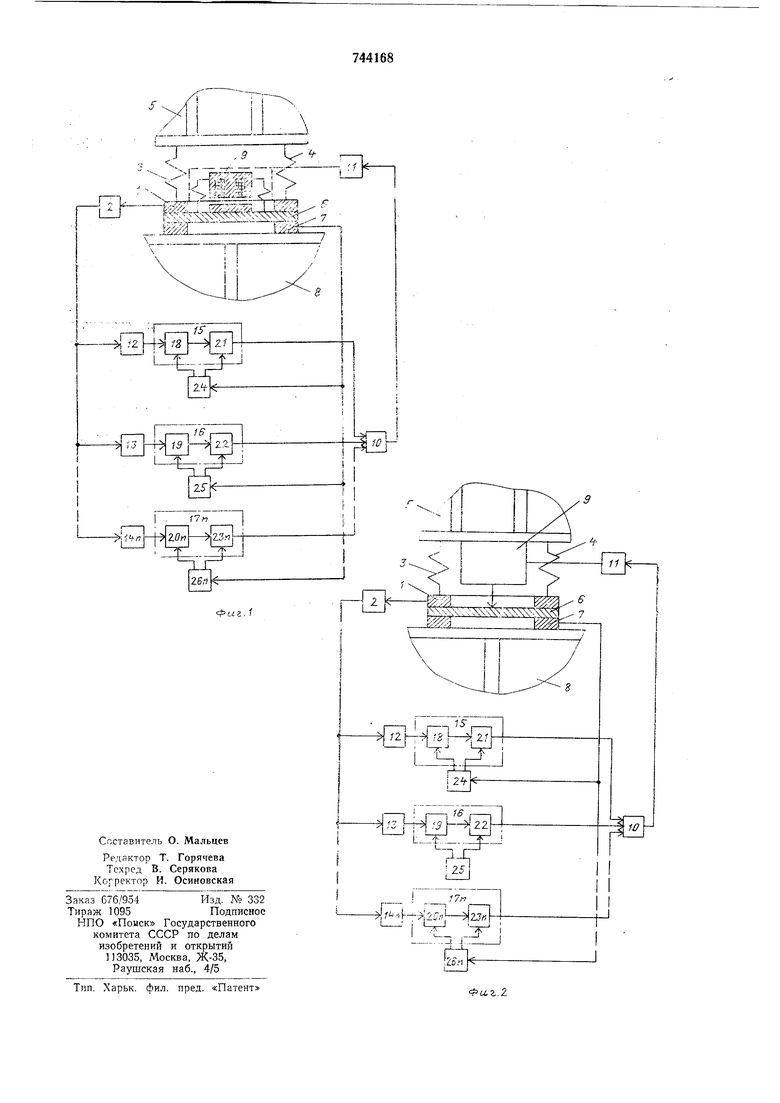
На фи.г. 1 изображена функциональная схема предлагаемого амортизатора при упругом кзреплении реактивной части вибратора к изолируемому объекту; на фиг. 2 - то же, при жестком крецлении корпуса вибратора к колеблющемуся объекту.
Амортизатор с автоматическ1им управлением содержит электромеханический динамометр / с предварительным усилителем 2, упругие элементы 3 и 4, одни концы которых предназначены для крепления к колеблющемуся объекту 5, а другие - 4ieipe3 электрамеханический динамометр, проставку 6 и дополнительный механический динамометр 7 взаимодействуют с изолируемым объектом 8, вибратор 9, воздействующий через дополнительный электромеханический динамометр 7 на изол|ируемый объект 5, аналоговый сумматор W, усилитель // мощности, вход которого подключен к выходу аналогового сумматора 10, а выход - к вибратору 9, полосовые фильтры 12, 13 .., 14 п (их число определяется количеством подлежащих гашению вибрационных составляющих, входы которых соединены с выходом предварительного усилителя 2), пары 15, 16 ... последовательно соединенных управляемых амплитудных 18, 19 ... 20 п v. фазовых 21, 22, ... 23 п регуляторов, каждая из которых связана с выходом соответствующего полосового фильтра и одним из входов аналогового сумматора 10, оптимизаторы 24, 25 . .. 26 п, входы которых подключены к выходу дополнительного динамометра 7, выходы соединены с соответствующими управляющими входами а-мплитудных и фазовых регуляторов, а электромеханические динамометры / и 7 установлены последовательно и разделены жесткой проставкой 6, скрепленной с рабочим органом вибратора 9.
Предлагаемый амортизатор работает следующим образом.
Колеблющийся объект 5, деформируя упругие элементы 3 и, 4, создает силовое вибрационное возбуждение изолируемого объекта 8, например опорного фундамента, амплитуды и фазы составляющих которого измеряются динамометром /. Сигнал с динамометра / че|рез усилитель 2 подается на каналы формирования управляющих сигналов.
Настройка этих каналов заключается в том, что параметры полосовых фильтров, амплитудных и фазовых регуляторов подбирают так, что при некоторых (обычно средних) значениях вибрационных частот составляющие усилия, развиваемого вибратором 9, равны по величине и противоположны по направлению соответствующим составляющих виб|рационного усилия, которое действует на
изолируемый объект 8 со стороны упругих элементов и 4. При этом все составляющие вибрационного усил1ия, на которые настраиваются каналы управления, полностью компенсируются зоилиями со стороны вибратора 9, и возбуждения изолируемого объекта 8 не происходит.
Для поддержания работы канала управления в режиме наилучшей компенсации вибрационных усилий используются оптимизаторы, каждый из которых имеет два независимых канала экс-лремального регулирования (амплитуды и фазы управляющего сигнала).
Одн1и каналы служат для управления
амплитудными, а друпие - фазовыми регуляторами. Каждый из каналов имеет различную частоту поисковых сигналов, что позволяет производить одновременный (параллельный) поиск необходимых амплитуд
и фаз сигналов управления для всех вибрационных составляющих.
В том случае, когда подаваемые на оптимизаторы сигналы имеют в своем составе несколько составляющих различных частот, оптимизаторы должны быть избирательными.
На входы амплитудных регуляторов с одного из выходов оптимизаторов подаются кратковременные поисковые сигналы, которые изменяют, например, увеличивают амплитуды сигналов 5 правления, а следовательно, изменяют компенсирующие силы, разВ|Иваемые вибратором 9. При этом суммарное усилие, действ1ующее на проставку
6 со стороны упругих элементов 5 и - вибратора 9, измеряется динамометром 7 и сравнивается с этим же суммарным усилием до подачи поискового сигнала. Если после подачл поискового сигнала суммарная
сила увеличилась, то поисковые сигналы начнут уменьшать амплитуду сигналов управления. Если суммарная сила уменьшилась, то поисковые сигналы будут продолжать увеличивать амплитуды сигналов управления до тех пор, пака суммарная сила не станет равна минимуму. При этом поисковые сигналы начнут поочередно уменьш ть и увеличивать амплитуД:у сигналовуправления, поддерживая суммарную силу
вблизи минимума. Каналы регулирования фаз работают аналогично и независимо от каналов регулирования амплитуд.
Для снижения динамической ошибки электромеханической системы управления и
как следствие увеличения эффективности
амортизатора в качестве полосовых фильтров могут быть использованы следящие полосовые фильтры. При этом величина искажений, вносимых полосовыми фильтрами и подлежащих отработке в системе экстремального управления снижается, время поиска экстремума уменьшается, а поэтому уменьшается и величина динамической опкибки, которая определяет достижимую степень компенсации вибрационных составляющих.
В том случае, когда перемещения колеблющегося объекта 5 малы, целесообразно использовать жесткое крепление корпуса вибратора к колеблющемуся объекту (фиг. 2). При этом увеличивается эквивалентная масса реактивной (колеблющейся) части нибровозбудителя.
При использовании амортизаторов для установки виброактивных механизмов на подвижных объектах перемещения колеблющегося объекта 5 обычно значительны и целесообразно использовать упругое крепление реактивной (колеблющейся) часш вибратора 9 к изолируемому объекту (фиг. 1).
Таким образом, благодаря тому, что амортизатор снабжен оптимизаторами, регулирующими амплитуды и фазы управляющих сигналов по критерию максимальной компенсации вибрационных сил, эффективность амортизатора при меняющихся по амплитуде и частоте вибрационных составляющих увеличивается.
Формула изобретения
Аморт1изатор с автоматическим управлением, содфжащий электромеханический динамометр с предварительным усилителем на выходе, упругие элементы, одни концы которых предназначены для крепления к колеблющемуся объекту, а другие - через электромеханический динамометр соединены с изолируемым объектом, вибратор, воздействующий на изолируемый объект, дополнительный электромеханический динамометр, установленный соосно с вибратором, аналоговый сумматор, усилитель мощности, вход которого подключен к выходу аналогового сумматора, а выход к вибратору, полосовые фильтры, входы которых соединены с выходом предварительного усилителя, пары последовательно соединенных управляемых амплитудных и фазовых регуляторов, каждая из которых связана с выходом соответствующего полосового фильтра и одним из входов аналогового
су1мматора, отличающийся тем, что, с целью увеличения эффективности при гашении меняющ ихся по амплитуде и частоте вибрационных составляющих, он снабжен оптимизаторами, входы которых подключены к выходу дополнительного динамометра, выходы соединены с соответствующими управляющими входами фазовых и амплитудных регуляторов, а электромеханические динамометры установлены последовательно
и разделены жесткой проставкой, скрепленной с рабочи1М органом вибратора.
Источники информации, принятые во внимание при экспертизе:
1 Авторск|0е свидетельство СССР № 589482, кл. F 16 F 15/03, .1976.
2. Авторское свидетельство по заявке № 2624943/25-28, кл. F 16 F 15/03, 1977 (прототип).
- 1/1И- 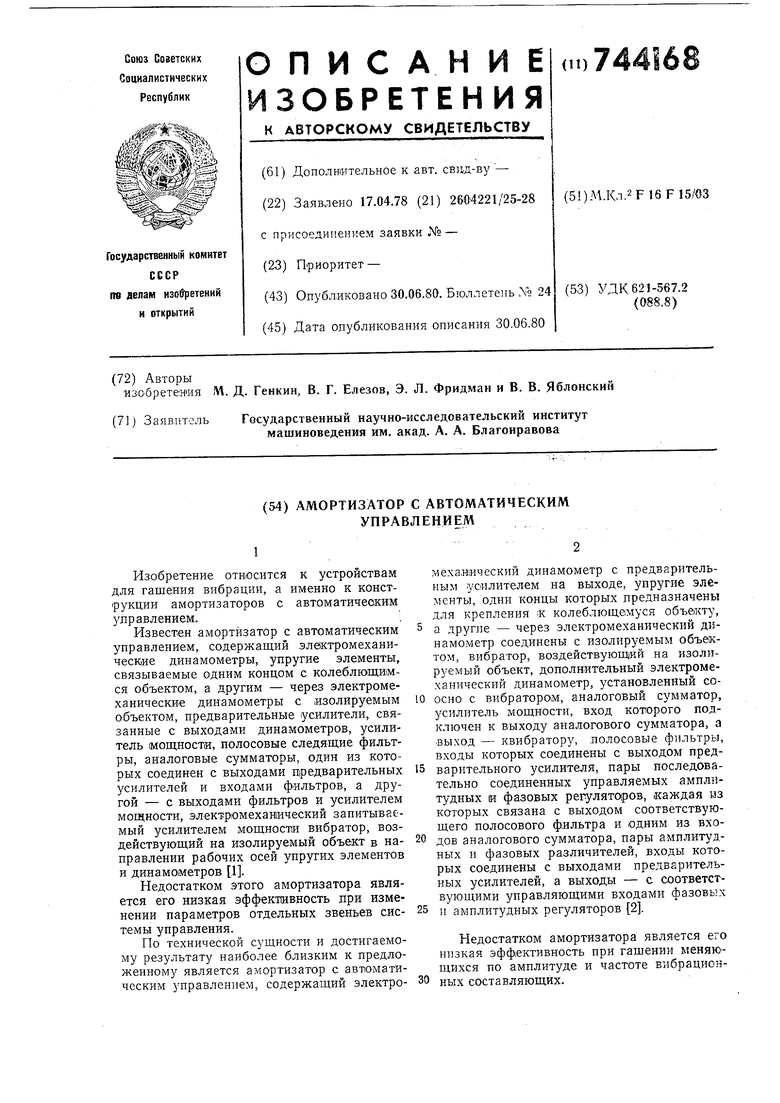
| название | год | авторы | номер документа |
|---|---|---|---|
| Амортизатор с автоматическим управлением | 1980 |
|
SU1010353A1 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU771381A2 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU652392A2 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1055924A2 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1024616A2 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU589482A1 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU596763A1 |
| Виброизолятор с автоматическим управлением | 1981 |
|
SU989200A1 |