I
Изобретение относится к устройствам для гашения колебаний, а именно к конструкции амортизаторов с автоматическим управлением.
Известен амортизатор с автоматическим управлением, содержапдий упругие элементы, закрепленные каждый одним концом к колеблющемуся объекту, а другим - через электромеханический динамометр к изолируемому объекту, усилитель, подключенный к выходу электромеханического динамометра, запитываемый усилителем мощности электромеханический вибратор, корпус, рабочий орган которого жестко закреплены к колеблющемуся и изолируемому объектам 1 .
Недостаток этого амортизатора заключается в том, что его эффективность в широкой полосе частот ограничена самовозбуждением электромеханической системы регулирования
По основному авт. св. № 589482 известен амортизатор с автоматическим управлением, содержащий электромеханические динамометры, упругие элементы, связываемые одним концом с колеблющимся объекто.м, а другим - через электромеханические динамометры с изолируемым объектом, предва рительные усилители, связанные с выходами дина.мометров, усилитель мощности, полосовые следящие фильтры, аналоговые сумматоры, один из которых соединяет выходы предварительных усилителей с входами полосовых фильтров, а другой - выходы полосовых фильтров с входом усилителя мощности, электромеханический запитываемый усилителем мощности вибратор, корпус и рабочий орган которого предназначены для
10 крепления к колеблющемуся и изолируемому объектам 2.
По технической сущности и достигаемому результату данный амортизатор наиболее близок к предлагаемому.
Недостаток амортизатора заключается в
5 том, что его эффективность, определяемая как отношение величины вибрации изолируемого объекта под амортизатором до и после включения цепи обратной связи электромеханической системы регулирования, супгествен2Q но снижается при изменении коэффициентов передачи отдельных звеньев системы на частотах вибрационных составляюпгих, подлежащих гащению. Особенно существенными эти изменения оказываются при установке
виброактивных объектов на подвижных основаниях, например судах. Объясняется это тем, что при наклонах основания меняется взаимное расположение корпуса и рабочего органа вибратора (например, якоря относительно сердечника с катушкой для случая применения вибратора электромагнитного типа), что сопровождается значительным изменением коэффициента передачи вибратора.
Цель изобретения - повышение эффективности при гашении меняющихся по амплитуде и частоте вибрационных составляюших.
Это достигается тем, что амортизатор предлагаемой конструкции снабжен дополнительным электромеханическим динамометром, устанавливаемым между рабочим органом вибратора и изолируемым объектом, предварительным усилителем, электрически связанным с дополнительным динамометром, несколькими парами последовательно соединенных амплитудных и фазовых регуляторов, каждая из которых связана с выходом соответствуюшего полосового фильтра и одним из входов аналогового сумматора, несколькими парами амплитудных ч фазовых различителей, входы которых ct .динены с выходами предварительных усилителей, а выходы - с соответствуюш,ими управляющими входами фазовых и амплитудных регуляторов.
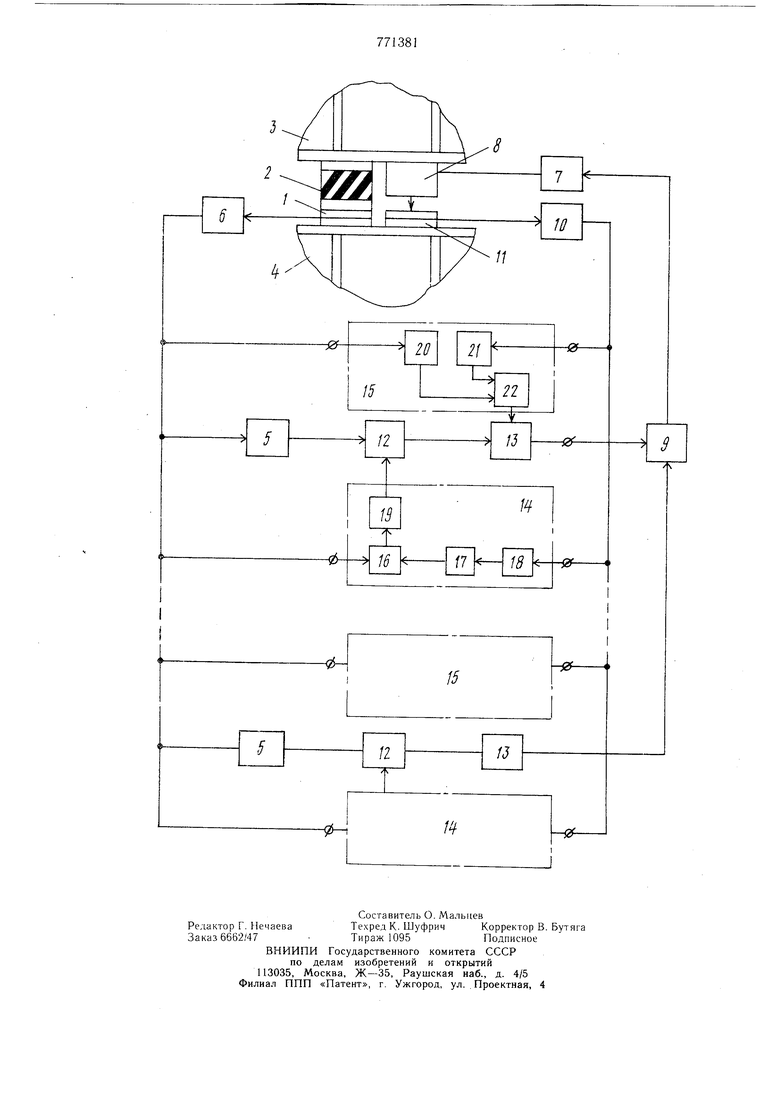
На чертеже изображена функциональная схема предлагаемого амортизатора с автоматическим управлением.
Амортизатор с автоматическим управлением содержит электромеханический динамометр 1, упругий элемент 2, сгязываемый одним концом с колеблющимся объектом 3, а другим - через электромеханический динамометр 1 с изолируемым объектом 4, полосовые фильтры 5, предварительный усилитель 6, запитываемый усилителем 7 мощности электромеханический вибратор 8, корпус которого предназначен для закрепления к колеблющемуся объекту 3, аналоговый сумматор 9, выход которого соединен с входом усилителя 7 мощности.
Кроме того, он снабжен дополнительными предварительным усилителем 10 и электромеханическим динамометром 11, устанавливаемым между рабочим органом вибратора 8 и изолируемым объектом 4 и подключенным к дополнительному усилителю 10, нес ;олькими парами последовательно соединенных управляемых фазовых 12 и амплитудных 13 регуляторов, связанных каждый с соответствующим выходом полосового фильтра 5 и одним из входов аналогового сумматора 9, несколькими парами избирательных фазовых 14 и амплитудных 15 различителей, входы которых соединены с выходами предварительных усилителей 6 и 10, а выходы - с соответствующими управляемыми входами фазовых -1 и амплитудных
13регуляторов.
В качестве избирательного фазового различителя 14 может быть использован фазовый детектор 16, один из входов которого соединен с выходом предварительного усилителя 6, а второй - с выходом синхронного генератора 17, блоки 18 синхронизации которого подключены к выходу дополнительного предварительного усилителя 10, приче.м выходом фазового различителя является выO ход фильтра 19 нижних частот, вход которого подключен к выходу фазового детектора 16.
В качестве избирательного а.мплитудного различителя 15 могут быть использованы два избирательных детектора 20 и 21, входы которых являются входами амплитудного различителя, а выходы подключены к входам аналогового сумматора 22, выход которого является выходом амплитудного различителя.
- Предлагаемый амортизатор работает следуюш,им образом. Настройка каналов формирования компенсирующих сил заключается в том, что параметры полосовых фильтров 5, фазовых 12 и амплитудных 13 регуляторов подбирают так, что при некоторых
5 (обычно средних) значениях частот вибрации составляющие усилия, развиваемого вибратором 8, равны по величине и противоположны по направлению соответствующим составляющим вибрационного усилия, которое действует на изолируемый объект 4 со
0 стороны упругого элемента 2. При этом все составляющие вибрационного усилия, на которые настраиваются каналы управления, полностью компенсируются усилиями со стороны вибратора 8, и возбуждения изолируеJ мого объекта 4 на этих частотах не происходит. Фазовые 14 и амплитудные 15 различители при этом настраиваются так, что напряжения на их выходах равно нулю. Если из-за из.менений частот вибрационных составляющих развиваемого вибратором 8 уси ЛИЯ отклоняются от требуемых для полной компенсации составляющих вибрации значений, то на выходах соответствующих фазовых 14 и амплитудных 15 различителей появляются напряжения, которые управляют соJ ответствующими фазовыми 12 и амплитудными 13 регуляторами так, что режи.м полной компенсации вибрационных составляющих во всех каналах восстанавливается.
Фазовые 4 и амплитудные 15 различите ли предназначены для фор.мирования напряжений, величина которых прямс5 пропорциональна разности фаз и амплитуд подаваемых на них сигналов, а знак напряжений определяется знаком разности фаз и амплитуд. В том случае, когда подаваемые на фазовые
14и амплитудные 15 различители сигналы имеют в своем составе несколько составляющих различных частот, фазовые 14 и амплитудные 15 различители должны быть избирательными.
Используемые в устройстве схемы фазового и амплитудного различителен работают следующим образом.
На фазовый детектор 16 фазового различителя 14 подаются виорационный сигнал с выхода предварительного усилителя 6 и сигнал с синхронного генератора 17, блоки 18 синхронизации которого подключены к выходу дополнительного предварительного усилителя 10. В общем случае, когда гашению подлежат вибрационные составляющие нескольких частот, вибратор 8 одновременно воздействует на изолируемый объект 4 несколькими составляющими усилий, имеющими те же частоты, что и вибрационный сигнал. Выходной сигнал динамометра 11, пропорциональный этим составляющим, после усиления усилителем 10 подается на блоки 18 синхронизации синхронного генератора .17. В результате синхронизации генератора 17 соответствующей составляющей выходного сигнала усилителя 10 его частота и фаза равны частоте и фазе этой составляющей. Фаза выходного напряжения синхронного генератора 17 сравнивается с фазой соответствующей составляющей сигнала, поступающего на другой вход фазового детектора 16 с выхода предварительного усилителя 6. Величина выходного напряжения фазового различителя пропорциональна разно ти фаз поданных на его входы напряжений, а знак определяется знаком этой разности, т.е. при смене знака разности фаз знак выходного напряжения фазового различителя меняется. Полярность напряжения на выходе фазового различителя 16 выбирается такой, чтобы будучи поданным на управляемый вход фазового регулятора 12 это напряжение изменяло бы фазу управляющего сигнала так, что фаза компенсирующего усилия со стороны вибратора 8 были бы всегда сдвинута на 180° по отношению к соответствующей составляющей вибрационной силы, передаваемой на изолируемый объект 4 и упругим элементом 2. Избирательность фазового различителя определяется полосой пропускания фильтра 19 нижних частот. При медленных изменениях фазы управляющего сигнала полоса пропускания фильтра нижних частот может быть узкой, а избирательность фазового различителя высокой.
При гашении одночастотной вибрации выходной сигнал дополнительного динамометра 11 является одночастотным и синхронный генератор 17 с блоками 18 синхронизации в фазовом различителе могут отсутствовать. При этом напряжение с выхода дополнительного предварительного усилителя 10 может быть подано непосредственно на вход фазового детектора 16.
Напряжения с выходов избирательных детекторов 20 и 21 суммируются в аналоговом сумматоре 22, выходное напряжение которого пропорционально разности амплитуд входных сигналов, а знак определяется знаком разности амплитуд.
Благодаря тому, что амортизатор снабжен системой автоматической подстройки амплитуды и фазы составляющих компенсирующего усилия, эффективность амортизатора с автоматическим управлением при гашении одной или нескольких меняющихся по амплитуде и частоте вибрационных составляющих увеличивается.
Формула изобретения
Амортизатор с автоматическим управлением по авт. св. № 589482, отличающийся тем, что, с целью повыщения эффективности при гашении меняющихся по амплитуде и частоте вибрационных составляющих, он снабжен дополнительным электромеханическим динамометром, устанаапиваемым между рабочим органом вибратора и изолируемым объектом, предварительным усилителем, электрически связанным с дополнительным динамометром, несколькими парами последовательно соединенных амплитудных и фазовых регуляторов, каждая из которых связана с выходом соответствующего полосового фильтра и одним из входов аналогового сумматора, несколькими парами амплитудных и фазовых различителей, входы которых соединены с выходами предварительных усилителей, а выходы - с соответствующими управляющими входами фазовых и амплитудных регуляторов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 259568, кл. F 16 F 15/03, 1970.
2.Авторское свидетельство СССР
№ 589482, кл. F 16 F 15/03, 1976 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Амортизатор с автоматическим управлением | 1978 |
|
SU744168A1 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU652392A2 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1055924A2 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU1024616A2 |
| Амортизатор с автоматическим управлением | 1980 |
|
SU1010353A1 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU589482A1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Амортизатор с автоматическим управлением | 1981 |
|
SU970008A2 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU706614A1 |