U(4p - постоянное напряжение, с которым сравнивается вос становленный непрерывны сигнал, амплитуда импульсов сфор мированной после до вачгель ности лл - относительная погрешност квантования сигнала по ypOBJflo. В случае использования греобразовате ля с линейной характеристикой входно воздействие-частота, проходящей через начало координат F K-P где F - частота сигнала; Р - входное воздействие; fl - постоянный коэффициент, характеризующий крутизну преобразования. Fi - Fi-t Pi FiHР;-1 Т.е. выработка команд управления на за пуск устройств производится при нии входного воздейстш я на заданн;у ю в личину. Однако в информационно-измерительной технике чаще всего используют измерительные преобразователи с начал ной частотой (соответствует нулевому входному воздействию), неравной нулю. Это обусловлено стремлением улучшить метрологические и технические характеристики при работе в начальной части рабочего диапазона. Кроме того, характеристика преобразователя часто сущест венно нелинейна. Например, характеристика широко применяемых вибрационночастотных датчиков описывается выражениемР 1-t-Z, Ро Го{0.25 iO,;) Z где FO 6000 (110,1) Гц- начальная частота датчика, Z - величина, зависимая от входного воздействия Р. В этих случаях известный способ Щ имеет ограниченные возможности щжме- нения, поскольку квантование сигнала п уровню с постоянной относительной погрешностью квантования приводит к существенно неравномерному квантованию входного воздействия. Целью изобретения является увеличение постоянства относительного шага квантования входного воздействия по ур ню при начальной частоте, не равной ну Для достижения поставленной цели пр способе запуска устройств, оперирующих с преобразованными в частоту следова- 34 шш импульсов входными воздействиями , основанном иа нахождении возникаюшего при измененш : уровня входного воздействия расхождения межру зарегистрированным взятым в качестве опорного и последующими значениями сигнала с применением восстановления и сравнения аналоговых сигналов и использования найденного расхождения для управления, формирования последовательности импульсов постоянной амплитуды, длительность которых в фиксхфованное число раз меньше зарегистрированного периода сигнала, из сформированной последовательности импульсов восстанавливают сигнал и сравнивают его текущее значение с постоянным напряжением, в фиксированное число раз меньшим амплитуды сформированных импульсов, формируют дополнительную последовательность импульсов постоянной амплитуды, частота следованяя которых соответствует начальной частоте, полярность соответствует знаку разности между текущим и «зарегистрированным значениями сигнала, длительность импульсов равна, а амплитуда меньше амплитуды импульсов псюледоватепьности, несущей информацию о величине и знаке расхождения между текущим и зарегистрированным значениями сигнала, в чяспо раз, пропорциональное заданной относительной величине шага квантования, и 1юсст а на вливают из дополнительно сформированной последовательности импульсов постоянное напряжение, используемое при сравнении аналоговых сигналов. Если на некотором участке рабочего диапазона преобразователя характеристика входное воздействие - частота с допустимой погрешностью аппроксимируется отрезком прямой, продолжение которой пересекает ось частот в точке, соответствующей начальной частоте, то справедливо выражение г. сс- г- с г Гл Р. - Pi- - Fj-Fi-1 FJ-FIH . PiH FjH-Fo a F,H --a FM O -- заданное относительное приращение входного воздейстш1Я, fjj-FVi 11 . }1 П- FO аТГЙ « Fi-t т.е. в момент ра нства напряжений, восстановленных из .последовательностей импульсов одинаковой формы, одна из которых несет информацшо о расхождении между текущим и зарегистрированным значениями сигнала, а другая - о расхождении между зарегистрированным и начальным значениями сигналов, имеющих одинаковую длительность импульсов и разные амПЛИТУцы, относительное приращение входной величины равно отношению амплитуд указанных последовательностей импульсов. Изменением соотношения амплитуа импульсов устанавливают заданную относительную
погрешность квантова1шя входного воздейСТШ1Я по уровню. Для ({жксаиии Заданных положительных и отрицательных приращени входного воздейст№я формируют последовательность импульсов, несущих информацию об относительной величине разности зафиксированной и начальной частот, соответственно положительной и отрицательной полярности. Если хара,ктеристика первичного преобразователя криволинейна и аппроксимируется рядом отрезков прямых, то при переходе с одного участка рабочего диапазона на другой изменяют частоту импульсов соответствующей последовательности, делая ее равной новому значению частоты.
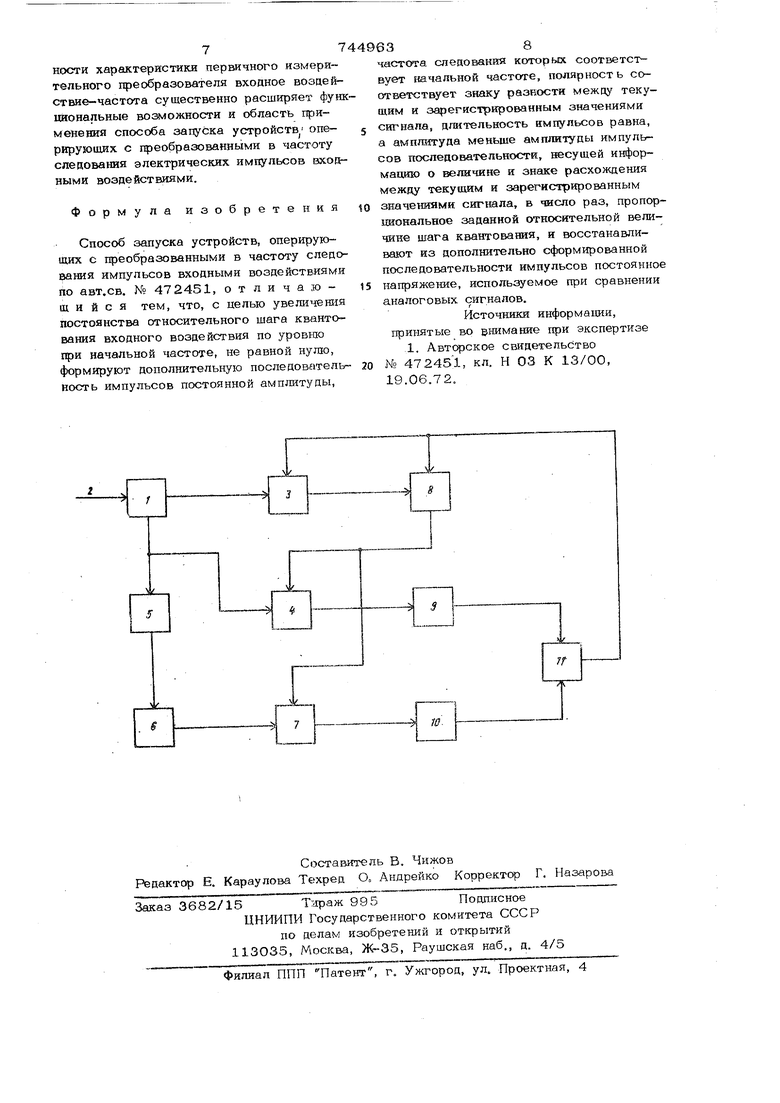
На чертеже представлен один из возможных вариантов устройства,peaлизу ющего способ.
Выход частотного датчика 1,на вход которого подается контролируемое входное воздействие 2, подсоединен к первым входам измерителя 3 периода частотного сигнала и формирователя 4 импульсов, а также ко входу блока 5 дискриминаторов частоты, выход которого подключен ко входу задатчика 6 начальных частот, подсоединенного выходом к первому входу формирователя 7 импульсов. Выход измерителя 3 периода через 8 памяти связан со вторыми входами формирователей 4 и 7, вьпсоды которых через фильтры 9 и 10 нижних частот соответственно подключены ко входам элемента 11 сравнения. Выход элемента сравнения соединен с обнуляющим входом регистра 8 памяти и входом управления измерителя 3 периода.
Частотный датчик 1, имеющий нелинейную характеристику, аппроксимируемую отрезками прямых, продолжения которых пересекают ось частот в точках, соответствующих начальным частотам, преобразует входное воздействие 2, поступающее на его вход, в поток электрических импульсов. Мгновенная частота следования этих импульсов пропорциональна уровню входного воздействия. По командам, поступающим с выхода элемевн та 11 сравнения в моменты ..равенства напряжений на ее бходах, обнуляются регистр 8 памяти и счетчик 3 измерителя периодов. С приходом ближайшего во
времени импульса частотного датчика 1 на другой вход измерителя периода, последний регистрирует длительность периода частотного сигнала, соответствующую мгновенному значеишю входного воз-действия. Зафиксированное значс ше периода используется при форм1гровании двух последовательностей прямоугольных импульсов одинаковой длительности формирователями 4 и 7.
С выхода формирователя 4 импульсов на вход фильтра 9 частот поступают импульсы, частота следования которых равна текущему значенгао частоты сигнала частотного датчика 1, а длительность - половине зарегистрированного периода. Эта последовательность импульсов несет информацшо об относительной величине и знаке расхождения между текущим и зарегистрированным значен1Ш ли сигнала. С выхода формирователя 7 импульсов на вход фильтра 10 шгжннх частот поступают импульсы той же, что и с выхода формирователя 4, длительности, но частота их равна начальной частоте, соответствующей участку характеристики частотного датчика, на котором происходит работа. Эта последовательность импульсов несет И 1формаш1ю об относительной величине разности заф 1КС1Грованной и начальной частот. Восстановленные фильтрами 9 и 10 нижних частот аналоговые значения сигналов поступают на входы элемента 11 сравнения. Поскольку амплитуды сформированных последовательностей импульсов отличаются в число раз, пропорциональное заданной относительной величине шага квантования входного воздействия по уровгао, то «;аждая очередная дискретизация сигнала частотного датчика будет происхош ть при отклонении текущего значения входного воздействия на эту заданную величину При переходе в процессе слежешш за текущим значением входного воздействия на другой участок аппроксимируемой отрезками прямой характеристики частотного датчика 1 блоком 5 дискриминаторов частоты вырабатывается передаваемая на задатчик 6 на1тльных частот команда, по которой с выхода его на вход формирователя 7 импульсов начинает поступать частотный сигнал, соответствующий новому значению начальной частоты.
Обеспечение постоянства относительного шага квантования входного воздействия по уровню независимо от наличия начального сдвига по частоте и не.чинейности характеристики первичного измерительного преобразователя входное воздействие-частота существенно расширяет функ циональные возможности и область п|:)Именения способа запуска устройств- оперирующих с преобразованными в частоту следования электрических импульсов вхойными воздействиями. Формула изобретения Способ запуска устройств, оперирующих с преобразованными в частоту слецования импульсов входными воздействиями по авт. св. № 472451, отличающийся тем, что, с целью увеличения постоянства относительного шага квантования входного воздействия по ypoBiiora при начальной частоте, не равной нулю, формируют дополнительную последовательНость импульсов постоянной амплитуды, частота следования которых соответствует качальной частоте, полярность соответствует знаку разности между текущим и зарегистрированным значениями сигнала, длительность импульсов равна, а амплитуда меньше амплитуды импульсов последовательности, несущей информацию о величине и знаке расхождения между текущим и зарегистрированным значениями сигнала, в число раз, пропорциональное заданной относительной величине шага квантования, и восстанавливают из дополнительно сформированной последовательности импульсов постоянное напряжение, используемое при сравнении аналоговых сигналов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 472451, кл, Н 03 К 13/00, 19.06.72.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ запуска устройств,оперирующих с преобразованными в частоту следования импульсов входными воздействиями | 1972 |
|
SU472451A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| Измеритель переходных характеристик | 1989 |
|
SU1723563A1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ И ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2393427C1 |
| СПОСОБ ДИСКРЕТНОГО КОНТРОЛЯ РАССТОЯНИЙ ДО ИСТОЧНИКА КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2028579C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ В ПРИСУТСТВИИ СЛУЧАЙНЫХ ШУМОВ | 1997 |
|
RU2133474C1 |
| Измеритель частотных переходных характеристик | 1986 |
|
SU1416945A1 |
| Устройство для измерения амплитуды радиоимпульсов | 1977 |
|
SU717675A1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
