Изобретение относится к области радиолокации и может быть использовано при разработке портативных нелинейных радаров для обнаружения подслушивающих устройств.
Известны нелинейные радары [Андреев Г.А., Потапов А.А. Миллиметровые волны в радиолокации. Системы индикации цели. Зарубежная радиоэлектроника, №11, 1984 г., и патент США №4053891, G01S 9/02, 1977 г.], которые содержат последовательно соединенные задающий генератор, усилитель мощности, фильтр нижних частот и передающую антенну, а также последовательно соединенные приемную антенну, полосовой фильтр, приемник и индикаторное устройство, при этом второй вход усилителя мощности через последовательно соединенные модулятор и синхронизатор подключен ко второму входу приемника.
Приведенные выше нелинейные радары не могут быть использованы для измерения дальности до источников радиоизлучения.
Известен нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом [Россия. Патент на изобретение №2234715 G01S 13/26, опубл. 20 августа 2004 г.], содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора, усилитель мощности, фильтр нижних частот и передающую антенну, а также последовательно соединенные приемную антенну, первый полосовой фильтр, смеситель, второй полосовой фильтр, приемник и индикаторное устройство, при этом второй вход смесителя через последовательно соединенные третий полосовой фильтр и усилитель-ограничитель подключен к выходу линейного частотно-модулированного генератора.
В данном радаре при отсутствии различий по дальности между искомым объектом и местными предметами на экране индикаторного устройства невозможна селекция полезного сигнала от помехи.
Наиболее близким по технической сущности к предлагаемому является нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом по патенту на изобретение №2251708, GO1S 13/02, опубл. 10 мая 2005, принятый за прототип.
Устройство-прототип содержит последовательно соединенные опорный генератор, первый делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора, первый и второй полосовые фильтры, причем выход первого полосового фильтра через последовательно соединенные второй делитель частоты, шестой полосовой фильтр, третий смеситель, седьмой полосовой фильтр, блок формирования зондирующего линейного частотно-модулированного (ЛЧМ) сигнала, усилитель мощности и фильтр нижних частот подключен к передающей антенне, последовательно соединенные приемную антенну, третий полосовой фильтр, первый смеситель, четвертый полосовой фильтр, второй смеситель, пятый полосовой фильтр, режекторный фильтр, четвертый смеситель, блок фильтров точной селекции, приемник и индикаторное устройство, второй вход которого подключен к выходу первого делителя частоты, причем второй вход третьего смесителя соединен с выходом опорного генератора и входом блока формирования гетеродинных напряжений, соответствующие выходы которого подключены соответственно ко вторым входам второго и четвертого смесителей, а выход второго полосового фильтра через блок формирования гетеродинного линейного частотно-модулированного сигнала соединен со вторым входом первого смесителя.
На практике поиск подслушивающих устройств производится с небольших расстояний, составляющих единицы - десятки сантиметров. Поэтому на вход приемной антенны, наряду с полезным сигналом, переизлученным объектом поиска, поступает помеха в виде отражений от подстилающей поверхности, состоящих из излучаемого линейного частотно-модулированного сигнала и его гармоник, прошедших фильтр нижних частот. Отсутствие временных различий между полезным сигналом и помехой не только не обеспечивает частотную селекцию полезного сигнала от помехи по частоте, но и его прохождение через режекторный фильтр устройства. Увеличение девиации частоты зондирующего линейного частотно-модулированного сигнала приведет только к смещению вправо по оси частот полезного сигнала и помехи.
Таким образом, недостатком известного нелинейного радара является наличие ограничений на обнаружение подслушивающих устройств, находящихся в ближней зоне поиска.
Задачей изобретения является расширение зоны поиска нелинейных объектов за счет обеспечения частотной селекции полезного сигнала от помехи, при отсутствии временных различий между ними, путем применения двойной линейной частотной модуляции в зондирующем сигнале и поэтапной обработки сигналов, поступающих на вход приемной антенны.
Решение поставленной задачи обеспечивается за счет того, что в нелинейный радар, содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора и два полосовых фильтра, входы которых соединены с выходом линейного частотно-модулированного генератора, последовательно соединенные первый блок зондирующего линейного частотно-модулированного сигнала и первый усилитель мощности, а также фильтр нижних частот, выход которого подсоединен к передающей антенне, кроме того, приемная антенна соединена с входом третьего полосового фильтра, последовательно соединенные первый смеситель, четвертый полосовой фильтр, второй смеситель и пятый полосовой фильтр, а также приемник, выход которого соединен с первым входом индикаторного устройства, второй вход которого подсоединен к выходу делителя частоты, согласно изобретению введены последовательно соединенные первый вентиль, первый направленный ответвитель и блок сложения мощности, выход которого соединен с входом фильтра нижних частот, последовательно соединенные второй блок формирования зондирующего линейного частотно-модулированного сигнала, второй усилитель мощности, второй вентиль и второй направленный ответвитель, выход которого соединен со вторым входом блока сложения мощности, при этом выходы первого и второго полосовых фильтров соединены с входами первого и второго блоков формирования зондирующего линейного частотно-модулированного сигнала соответственно, выход первого усилителя мощности соединен с входом первого вентиля, вторые выходы первого и второго направленных ответвителей соединены со вторыми входами первого и второго смесителей соответственно, а также усилитель высокой частоты, выход которого соединен с входом первого смесителя, а вход - с выходом третьего полосового фильтра, причем выход пятого полосового фильтра соединен с входом приемника.
Для реализации частотной селекции полезного сигнала от помехи при отсутствии между ними временных различий в известном нелинейном радаре введены второй блок формирования зондирующего линейного частотно-модулированного (ЛЧМ) сигнала, второй усилитель мощности, два вентиля, два направленных ответвителя, блок сложения мощности и усилитель высокой частоты.
Второй усилитель мощности предназначен для исключения появления на выходе передающей антенны гармоник зондирующего сигнала на частоте

где fИЗЛ.01(t), fИЗЛ.02(t) - центральные частоты зондирующих ЛЧМ-сигналов, поступающих соответственно на первый и второй входы блока сложения мощности.
В результате одновременного зондирования двух ЛЧМ-сигналов на нелинейном элементе объекта поиска в силу его нелинейной зависимости вольтамперной характеристики облучаемый сигнал претерпевает нелинейное преобразование в набор комбинационных составляющих их гармоник:

где k, m, n - целые положительные числа и нуль.
Физические процессы при одновременном зондировании двумя ЛЧМ-сигналами объекта поиска описываются следующим образом.
На нелинейный элемент объекта поиска воздействуют два ЛЧМ-сигнала вида:

где I0 - амплитуды ЛЧМ-сигналов;
ω01=2πF01; ω02=(ω01+Δω0)=2π(F01+ΔF0) - угловые частоты первого и второго ЛЧМ-сигналов соответственно;
ΔF0 - приращение центральной частоты второго ЛЧМ-сигнала;
 - скорость перестройки угловой частоты ЛЧМ-сигналов;
- скорость перестройки угловой частоты ЛЧМ-сигналов;
Δω=ω02-ω01=2πΔF - девиация частоты.
Известно, что вольтамперная характеристика нелинейного элемента апроксимируется разложением в ряд Тейлора. Тогда переизлученный нелинейным элементом сигнал IS(t) можно найти как

где α, β, δ - коэффициенты преобразования при соответствующих степенных членах ряда.
Подставляя в (4) воздействующие сигналы (3), получим, что первый член ряда является линейным и сигналы не испытывают нелинейных преобразований. Раскрывая квадратичный член ряда (4), преобразованный нелинейным элементом объекта поиска, сигнал высших гармоник будет иметь вид

где Δω0=ω2-ω1.
Таким образом, преобразованный нелинейным элементом объекта поиска сигнал на частоте (1) представляет собой ЛЧМ-сигнал с удвоенным значением девиации частоты и стопроцентной амплитудной модуляцией.
Весь спектр сигналов комбинационных составляющих вторичного излучения (5) переизлучается в эфир. Данные сигналы поступают на вход приемной антенны устройства практически одновременно и отличаются от сигналов (3) временем задержки τ и удвоенным значением девиации частоты. Предположим, что резонансная частота третьего полосового фильтра согласована только с центральной частотой второго слагаемого выражения (5), то есть ωФП3=ω01+ω02, а полоса пропускания ΔωФП3=2Δω. После преобразования по частоте и двухэтапной корреляционной свертки сигналов (5) на выходе второго смесителя, опуская промежуточные выкладки, получим

где Δωτ=μ·τ - приращение угловой частоты, обусловленное временем задержки τ.
Так, например, для приращения центральной частоты второго ЛЧМ-сигнала  значение девиации частоты первого и второго зондирующих сигналов (3) ΔF=25,0 МГц, длительности ЛЧМ-импульса τИ=500·10-6с и задержки полезного ЛЧМ-сигнала и помехи τ=10·10-9с приращение частоты для второго слагаемого
значение девиации частоты первого и второго зондирующих сигналов (3) ΔF=25,0 МГц, длительности ЛЧМ-импульса τИ=500·10-6с и задержки полезного ЛЧМ-сигнала и помехи τ=10·10-9с приращение частоты для второго слагаемого  составит 500 Гц, а частоты первого и второго слагаемых из (6) составят 99,5 кГц и 100,5 кГц соответственно. Поэтому для обнаружения подслушивающих устройств, находящихся в ближней зоне поиска, полоса пропускания пятого полосового фильтра должна находиться в пределах от 300 Гц до 3400 Гц.
составит 500 Гц, а частоты первого и второго слагаемых из (6) составят 99,5 кГц и 100,5 кГц соответственно. Поэтому для обнаружения подслушивающих устройств, находящихся в ближней зоне поиска, полоса пропускания пятого полосового фильтра должна находиться в пределах от 300 Гц до 3400 Гц.
Таким образом, введение в состав нелинейного радара новых блоков и линий связи обеспечивает частотную селекцию полезного сигнала от помехи при отсутствии между ними временных различий и расширяет его возможности по обнаружению радиоэлектронных устройств в ближней зоне поиска.
На фиг.1 представлена структурная схема предлагаемого нелинейного радара.
На фиг.2 - амплитудно-частотный спектр сигнала на выходе линейного частотно-модулированного генератора.
На фиг.3 представлены амплитудно-частотные характеристики первого и второго полосовых фильтров соответственно.
На фиг.4 приведены амплитудно-частотные спектры ЛЧМ-сигналов на выходе первого и второго полосовых фильтров.
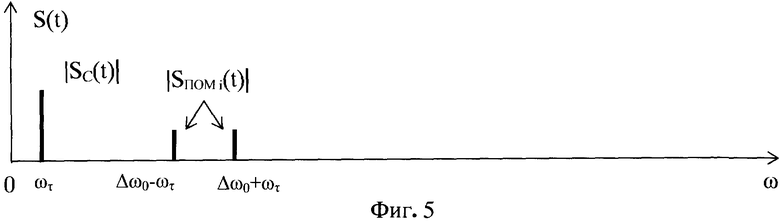
На фиг.5 приведены амплитудно-частотные спектры преобразованных по частоте и спектру сигналов на выходе второго смесителя.
На фиг.6 приведен амплитудно-частотный спектр полезного сигнала на выходе пятого полосового фильтра.
На фиг.1 структурной схемы нелинейного радара приняты следующие обозначения:
1 - опорный генератор;
2 - делитель частоты;
3 - ЛЧМ-генератор;
4.1, 4.2, 4.3, 4.4, 4.5 - первый, второй, третий, четвертый и пятый полосовые фильтры;
5.1, 5.2 - первый и второй блоки формирования зондирующего ЛЧМ-сигнала;
6.1, 6.2 - первый и второй усилители мощности;
7 - фильтр нижних частот,
8, 9 - передающая и приемная антенны;
10.1, 10.2 - первый и второй смесители;
11 - приемник;
12 - индикаторное устройство;
13.1, 13.2 - первый и второй вентили;
14.1, 14.2 - первый и второй направленные ответвители;
15 - блок сложения мощности;
16 - усилитель высокой частоты.
Предлагаемое устройство содержит последовательно соединенные опорный генератор 1 и делитель частоты 2, выход которого соединен с первым входом ЛЧМ-генератора 3, второй вход которого соединен с выходом опорного генератора 1, а выход ЛЧМ-генератора 3 подсоединен к входам первого 4.1 и второго 4.2 полосовых фильтров. При этом выход первого полосового фильтра 4.1 через последовательно соединенные первый блок формирования зондирующего ЛЧМ-сигнала 5.1, первый усилитель мощности 6.1, первый вентиль 13.1 и первый направленный ответвитель 14.1 соединен с первым входом блока сложения мощности 15, выход которого через фильтр нижних частот подсоединен к передающей антенне 8. Выход второго полосового фильтра 4.2 через последовательно соединенные второй блок формирования зондирующего ЛЧМ-сигнала 5.2, второй усилитель мощности 6.2, второй вентиль 13.2 и второй направленный ответвитель 14.2 соединен со вторым входом блока сложения мощности 15. Кроме того, последовательно соединенные приемную антенну 9, третий полосовой фильтр 4.3, усилитель высокой частоты 16, первый смеситель 10.1, четвертый полосовой фильтр 4.4, второй смеситель 10.2, пятый полосовой фильтр 4.5 и приемник 11, выход которого соединен с первым входом индикаторного устройства 12, второй вход которого соединен с выходом делителя частоты 2. При этом второй выход первого направленного ответвителя 14.1 соединен со вторым входом первого смесителя 10.1, а второй выход второго направленного ответвителя 14.2 соединен со вторым входом второго смесителя 10.2.
Заявляемый нелинейный радар работает следующим образом.
Высокостабильные колебания с выхода опорного генератора 1 с тактовой частотой ωT поступают на вход делителя 2 частоты и на второй вход ЛЧМ-генератора 3. Делитель 2 частоты предназначен для формирования импульсов запуска ЛЧМ-генератора 3 и для синхронизации индикаторного устройства 12. Период повторения импульсов равен длительности ЛЧМ-сигнала. Амплитудно-частотный спектр ЛЧМ-сигнала  на выходе генератора 3 показан на фиг.2. ЛЧМ-сигнал с выхода генератора 3 поступает на входы первого и второго полосовых фильтров 4.1 и 4.2.
на выходе генератора 3 показан на фиг.2. ЛЧМ-сигнал с выхода генератора 3 поступает на входы первого и второго полосовых фильтров 4.1 и 4.2.
Вид амплитудно-частотных характеристик полосовых фильтров 4.1 и 4.2 приведен на фиг.3.
Полосовые фильтры 4.1 и 4.2 настроены на второй и четвертый подспектры ЛЧМ-сигнала соответственно (см. фиг.2 и фиг.3). С выхода полосовых фильтров 4.1 и 4.2 выделенные ЛЧМ-сигналы поступают на входы блоков 5.1 и 5.2 формирования зондирующих ЛЧМ-сигналов. В этих блоках происходит умножение угловой частоты опорных ЛЧМ-сигналов в N раз.
Частоты зондирующих ЛЧМ сигналов fЗОНД.i(t) выбираются из условия

где N - коэффициент умножения;
Ω0i.ЛЧМ=iωT- Ω0i - центральная частота i-го четного подспектра ЛЧМ-сигнала, где i=1, 2...;
Ω0 - начальная угловая частота первого подспектра ЛЧМ-сигнала;
Δ Ω=μτИ - девиация угловой частоты подспектра ЛЧМ-сигнала;
t - текущее время.
С выхода блоков 5.1 и 5.2 ЛЧМ-сигналы через последовательно соединенные усилитель мощности 6.1 (6.2), вентиль 13.1 (13.2) и направленный ответвитель 14.1 (14.2) поступают соответственно на первый и второй входы блока 15 сложения мощности. На выходе блока 15 сложения мощности формируется зондирующий сигнал из суммы двух ЛЧМ-сигналов, центральные частоты которых отстроены друг от друга на величину Δω0=N( Ω02- Ω01). Сформированный зондирующий сигнал через фильтр 7 нижних частот поступает на вход передающей антенны 8.
Усилители 5.1 и 5.2 мощности могут быть выполнены по схеме линейного усилителя и согласованы с шириной спектра зондирующего сигнала (7).
Направленные ответвители 14.1 и 14.2 предназначены для формирования первого и второго гетеродинных ЛЧМ-напряжений, частоты которых fГ1(t) и fГ2(t) поступают соответственно на вторые входы смесителей 10.1 и 10.2.
Поиск объектов с нелинейными элементами начинается с момента излучения передающей антенной 8 зондирующих ЛЧМ-сигналов (7).
В сигнале, поступающем на вход приемной антенны 9, наряду с сигналом (7), отраженным от объектов с нелинейными рассеивателями, присутствует сигнал (5), отсутствующий в спектре облучающего поля.
Полоса пропускания полосового фильтра 4.3 согласована в основном со вторым слагаемым выражения (5). Полезный сигнал и помеха с выхода полосового фильтра 4.3 поступают через усилитель высокой частоты 16 на смеситель 10.1, где они смешиваются с сигналом первого ЛЧМ-гетеродина:

На выходе смесителя 10.1 формируются сигналы первой угловой промежуточной частоты (ωПЧ1):

где ωC(t-τ)=ωЗОНД.1(t-τ)+ωЗОНД.2(t-τ);
i=1, 2;
ωПОМ.1(t-τ)=2ωЗОНД.1(t-τ); ωПОМ.2(t-τ)=2ωЗОНД.2(t-τ).
Полоса пропускания полосового фильтра 4.4 согласована в основном с первым слагаемым выражения (9). Полезный сигнал  и часть спектра по
и часть спектра по

где они смешиваются с сигналом второго ЛЧМ-гетеродина
На выходе смесителя 10.2 формируются сигналы второй угловой промежуточной частоты (ωПЧ2)

Амплитудно-частотные спектры полезного сигнала и помехи  приведены на фиг.5.
приведены на фиг.5.
Сигналы (11) поступают на вход полосового фильтра 4.5. Ширина полосы пропускания полосового фильтра 4.5 ΔωПФ4.5 определяет полосу обзора нелинейного радара.
Вид амплитудно-частотного спектра полезного сигнала на входе приемника 11 приведен на фиг.6.
В приемнике 11 происходит усиление и преобразование полезного сигнала к виду удобному для наблюдения на индикаторном устройстве 12.
Таким образом, введение в состав нелинейного радара новых блоков и линий связи не только снижает влияние гармоник зондирующего сигнала, поступающих на вход приемника, как с передающей антенны, так и отраженных от подстилающей поверхности, но и обеспечивает частотную селекцию полезного сигнала от помехи при отсутствии временных различий между ними, что обеспечивает обнаружение радиоэлектронных устройств в ближней зоне поиска.
Для реализации технического решения может быть использовано стандартное промышленное оборудование. Так, например, опорный генератор 1 представляет собой генератор с кварцевой стабилизацией, выполненный, например, на микросхеме серии К564ЛН2 [В.Н.Вениаминов, О.Н.Лебедев, А.И.Мирошниченко. Микросхемы и их применение: Справ. Пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989 г. 240 с., стр.210, рис.7.10, д].
Делитель частоты 2 может быть выполнен, например, на микросхеме серии КМ155ИЕ8 [Перельман Б.Л., Шевелев В.И. Отечественные микросхемы и зарубежные аналоги. Справочник, "НТЦ Микротех", 2000 г. - 375 с.: ил., стр.129, 81].
ЛЧМ-генератор 3 представляет собой, например, схему цифрового синтезатора ЛЧМ-сигнала [Кочемасов В.Н., Белов Л.А., Оконешников В.С.Формирование сигналов с линейной частотной модуляцией. - М.: Радио и связь, 1983. - 192 с., ил., стр.55, рис.4.12].
Фильтр нижних частот 7, полосовые фильтры 4.1, 4.2, 4.3, 4.4 и 4.5 могут быть выполнены, например, по схеме полосового фильтра [Радиопередающие устройства. / М.В.Балакирев, Ю.С.Вохмяков, А.В.Журиков и др.; Под ред. О.А.Челнокова. - М.: Радио и связь, 1982. - 256 с., ил., стр.94, рис.4.12].
Смесители 10.1 и 10.2 представляют собой, например, диодные преобразователи частоты, выполненные по балансной схеме [М.С.Шумилин, В.Б.Козырев, В.А.Власов. Проектирование транзисторных каскадов передатчиков. Учебное пособие для техникумов. - М.: Радио и связь, 1987. - 320 с.: ил., стр.178, рис.2.77].
Блоки 5.1 и 5.2 формирования зондирующих ЛЧМ-сигналов могут быть выполнены по схеме ФАПЧ с умножением входного опорного ЛЧМ-сигнала Ω01 ( Ω01) (см. фиг.4) в N раз [Гальперин М.В. Практическая схемотехника в промышленной автоматике. - М.: 1987. - 320 с.: ил., см. стр.183, рис.4.18, б].
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен нелинейный радар, в котором обеспечивается частотная селекция полезного сигнала от помехи при отсутствии между ними временных различий. Это достигается за счет применения зондирующего сигнала с двойной линейной частотной модуляцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2003 |
|
RU2251708C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2002 |
|
RU2234715C2 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| ПРИЁМОПЕРЕДАТЧИК РАДАРА НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2687286C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2138064C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ, ВКЛЮЧАЮЩИХ ЭЛЕМЕНТЫ С НЕЛИНЕЙНЫМИ ВОЛЬТАМПЕРНЫМИ ХАРАКТЕРИСТИКАМИ | 2000 |
|
RU2166769C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ С ЛИНЕЙНЫМ ЧАСТОТНЫМ МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2020 |
|
RU2750571C1 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |




Изобретение относится к области радиолокации и может быть использовано при разработке портативных нелинейных радаров для обнаружения подслушивающих устройств. Достигаемым техническим результатом является расширение зоны поиска нелинейных объектов. Нелинейный радар содержит опорный генератор, делитель частоты, линейный частотно-модулированный генератор, пять полосовых фильтров, два блока формирования зондирующего линейного частотно-модулированного сигнала, два усилителя мощности, фильтр нижних частот, передающую и приемные антенны, два смесителя, приемник, индикаторное устройство, два вентиля, два направленных ответвителя, блок сложения мощности и усилитель высокой частоты, соединенных между собой определенным образом, что не только снижает влияние гармоник зондирующего сигнала, поступающих в приемник, как с передающей антенны, так и отраженных от подстилающей поверхности, но и обеспечивает частотную селекцию полезного сигнала от помехи при отсутствии временных различий между ними, что обеспечивает обнаружение радиоэлектронных устройств в ближней зоне поиска. 6 ил.
Нелинейный радар для обнаружения подслушивающих устройств, содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора и два полосовых фильтра, входы которых соединены с выходом линейного частотно-модулированного генератора, последовательно соединенные первый блок зондирующего линейного частотно-модулированного сигнала и первый усилитель мощности, а также фильтр нижних частот, выход которого подсоединен к передающей антенне, приемная антенна соединена с входом третьего полосового фильтра, кроме того, последовательно соединенные первый смеситель, четвертый полосовой фильтр, второй смеситель и пятый полосовой фильтр, а также приемник, выход которого соединен с первым входом индикаторного устройства, второй вход которого подсоединен к выходу делителя частоты, отличающийся тем, что введены последовательно соединенные первый вентиль, первый направленный ответвитель и блок сложения мощности, выход которого соединен с входом фильтра нижних частот, последовательно соединенные второй блок формирования зондирующего линейного частотно-модулированного сигнала, второй усилитель мощности, второй вентиль и второй направленный ответвитель, выход которого соединен со вторым входом блока сложения мощности, при этом выходы первого и второго полосовых фильтров соединены с входами первого и второго блоков формирования зондирующего линейного частотно-модулированного сигнала соответственно, выход первого усилителя мощности соединен с входом первого вентиля, вторые выходы первого и второго направленных ответвителей соединены со вторыми входами первого и второго смесителей соответственно, а также усилитель высокой частоты, выход которого соединен с входом первого смесителя, а вход - с выходом третьего полосового фильтра, причем выход пятого полосового фильтра соединен с входом приемника.
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2003 |
|
RU2251708C1 |
| RU 2002125601 A, 27.03.2003 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ СКРЫТЫХ ЭЛЕКТРОННЫХ УСТАНОВОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2150120C1 |
| US 2002158697 A1, 31.10.2002 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "КУРИЦА С РИСОМ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2313970C1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |

