(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU798710A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ | 1979 |
|
SU830304A1 |
| Устройство для определения координат точечных световых объектов | 1983 |
|
SU1113822A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ИСТОЧНИКОВ АКТИВНОЙ ШУМОВОЙ ПОМЕХИ | 1992 |
|
RU2072527C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
1
Изобретение относится к области роботехники и может быть использовано при
создании промышленных роботов, способных определять форму и местоположение объектов манипулирования.
Известно устройство для управления адаптивным роботом, содержащее телевизионные камеры, процессоры, электронно-вычислительную машину и исполнительные приводы робота 1. Оно является сложным, дорогостоящим и служит для распознавания только детерминованных объектов.
Наиболее близким техническим решением к данному изобретению является устройство, содержащее излучатели, фотоприемники, соединенные с блоками считывания, и последовательно соединенные блок памяти, электронно-вычислительную машину и приводы исполнительного органа робота 2.
Данное устройство не позволяет всегда точно определять форму и ориентацию отдельно стоящих объектов и определять количество и взаимную ориентацию относительно друг друга группы объектов.
Целью изобретения является расширение функциональных возможностей устройства.
Сущность изобретения заключается в том, что устройство содержит привод и датчик вращения рабочего стола, привод и датчик вертикального перемещения рабочего стола, преобразователи угол-код, вычислители координат и последовательно соединенные диссектор, формирователь строб-импульсов и логический блок, каждый выход которого через последовательно соединенные преобразователь угол-код и вычислитель координат подключен к входу блока памяти, соответствующий вход которого соединен с выходом датчика вертикального перемещения рабочего стола, связанного с приводом вертикального перемещения рабочего стола,вход которого подключен к первому выходу электронно-вычислительной машины, второй выход которой соединен со входом привода вращения рабочего стола, связанного с датчиком вращения рабочего стола выход которого подключен к соответствующим входам вычислителей координат.
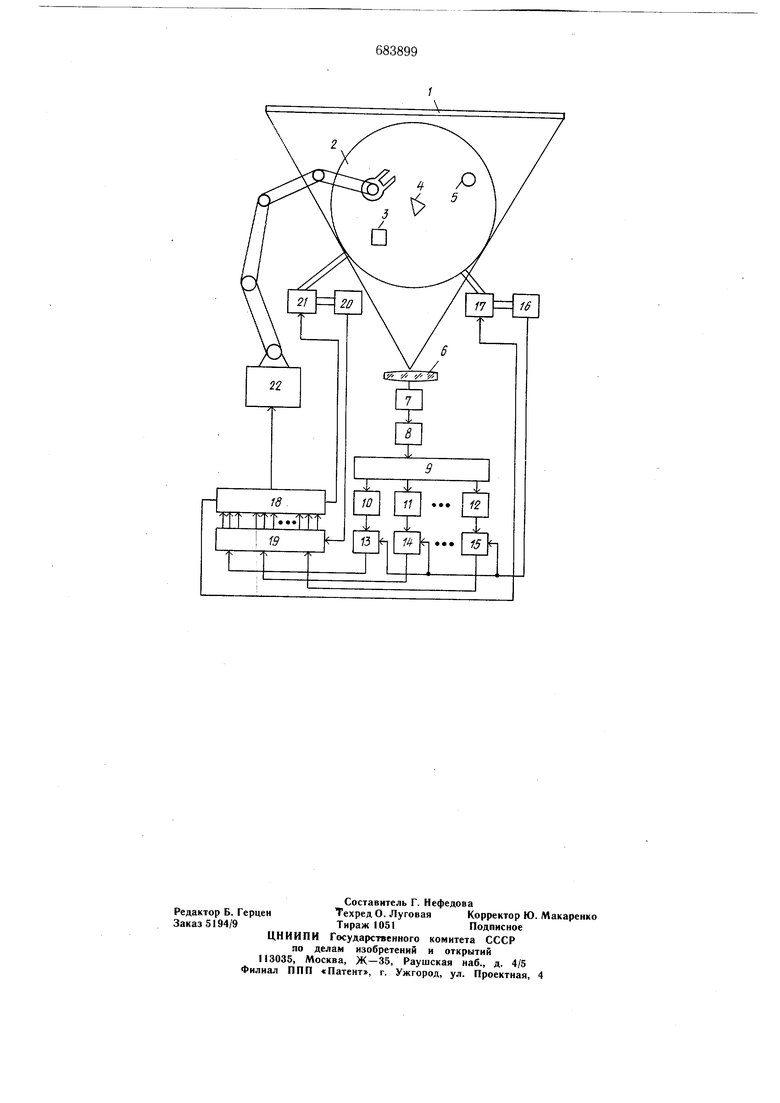
На чертеже изображена функциональная схема устройства для управления адаптивным роботом.
Устройство содержит излучатель 1; рабочий стол 2; объекты 3, 4, 5 манипулирования: приемный объектив 6; диссектор 7; формирователь 8 строб импульсов; логический блок 9; преобразователи 10, 11, 12 угол-код вычислители 13, 14 15 координат; датчик 16 вращения рабочего стола; привод 17 вращения рабочего стола; элект ронно-вычислительная мащина 18; блок 19 памяти; датчик 20 вертикально1о перемещения рабочего стола; привод 21 вертикального перемещения рабочего стола; приводы 22 исполнительного органа робота.
Устройство работает следующим образом.
При расположении объектов 3-5 на рабочем столе 2 изображение излучателя 1 на фотокатоде диссектора 7, сформированное с помощью приемного объектива 6, представляет собой прерывистую светлую линию, считывание которой диссектором 7 приводит к возникновению на его выходе периодически.ч (с частотой сканирования диссектором) п;иротно-импульсных сигналов. Информация об углах визирования начальной и конечной границ объектов 3-5, затеняющих собой соответствующие части излучателя 1 из точки наблюдения, связанной с приемной апертурой объектива 6, сосредоточена во временном положении фронтов и спадов импульсов для указанной щиротно-импульсной периодической последовательности, причем временное положение фронтов и спадов чередуется, что позволяет формировать временные стробы в формирователе 8 строб-импульсов, соответствующие последовательностям фронтов н спадов раздельно в пределах каждого из периодов сканирования диссектором, а также производить группировку этих строб-импульсов в логическом блоке 9 по принадлежности их к визуализации того или иного объекта 3-5 при последовательном сканировании рабочей зоны малым мгновенным углом зрения, формируемым при работе диссектора 7.
Для упрощения рассуждений будем полагать сначала, что на столе установлен только один объект. При этом с первого выхода логического блока 9 на вход преобразователя 10 угол-код будут приходить строб-импульсы раздельно от фронтов щиротно-импульсной последовательности (в одном ее периоде при этом будет содержаться только один прямоугольный импульс) и от спадов с ча.стотой следования, равной частоте развертки, подаваемой на дис-сектор 7. Временные положения этих стробов однозначно соответствуют азимутам начальной границы данного объекта (начальной границы затенения линейного осветителя по ходу сканирования диссектором)- для строб-импульсов . фронтов широтно-импульсной последовательности, а также азимутам конечной
границы этого объекта-для строб-импульсов спадов щиротно-и.мпульсной последовательности. Азимуты отсчитываются от исходного положения визирования рабочего поля диссектором 7, например слева от центра стола, то есть отсчет времени происходит от момента начала развертки по каждой строке в диссекторе 7. Временные интервалы в преобразователе 10 угол-код представляются двоичным кодом, отвечающим данному азимуту визирования той или иной границы объекта, наблюдаемой входным зрачком приемного объектива 6 при данном угловом положении рабочего стола 2. При повороте рабочего стола 2 на некоторый т.искретный угловой интервал (например на 1/64
5 от полного оборота, т. е. на 5,625°) тот же объект наблюдается фактически уже с другого ракурса, поэтому значения азимутов его начальной и конечной границ, вообще говоря, изменяются, то есть изменяется код на выходе преобразователя 10 угол-код для
соответствующих текун их (дискретных) значений азимутов. При этом в вычислителе 13 координат, связанном с выходом преобразователя 10 угол-код и с выходо.м датчика 16 вращения, определяются координаты тоJ чек пересечения двух групп азимутов: азимутов начальных границ объекта для смежных дискретных положения рабочего стола 2 по углу его поворота приводом 17 вращения рабочего стола и азимутов конечных границ этого объекта для тех же с лежных дискретных угловых положений рабочего стола 2. lip с-м точки пересечения вычисляемые в вычислителе 13 координат аналитическим путе.м, являются верщинами многоугольника, описанного вокруг данного объекта на высоте его сечения линиями визирования в ска нирующе.м режиме. Таким образом, для двух смежных дискретных угловых положений стола вычислитель 13 координат определяет в цифровом коде координаты двух верщин такого многоугольника (эти верщи0 ны существенно разделены между собой в плоскости многоугольника, но не обязательно являются его оппозитными вершинами). Для следуощего дискретного поворота рабочего стола 2 вычислитель 13 координат определит коды двух других верщин многоугольника, каждая из которых достаточно близко .расположена к предыдущим верщинам, поскольку для построения этих новых двух верщин используется пара азимутальных направлений из предыдущего вычисления вершин, и т. д. Приблизительно на пол-оборота рабочего стола 2 вычи лителя 13 координат построим все верщины (для данного примера их будет 64«2 128 вершин) описанного многоугольника, контур которого с большой степенью точности
5 будет характеризовать выпукло-преобразованный контур данного объекта в данно.м сечении его линиями сканирования (на данной высоте от плоскости стола). Эта информация о контуре данного объекта, зада&аемом вершинами описанного многоугольника, накапливается в блоке 19 памяти раздельно для каждого из дискретных вертикальных перемещений рабочего стола 2 приводом 21 вертикального перемещения, для чего высота положения стола контролируется датчиком 20 вертикального перемещения и соответствующие дискретные сигналы передаются на общий для всех каналов вход блока 19 памяти. По мере поворота рабочего стола 2 на угол, несколько больщий 180° (отвечающий полному построению описанного многоугольника на соответствующих его вершинах для данного сечения сканирования), плоскость рабочего стола 2 дискретно изменяет свою высоту относительно горизонтальной плоскости, в которой лежат излучатель 1 и входной зрачок приемного объектива 6, благодаря действию привода вертикального перемещения. После этого цикл вычисления верщин нового описанного многоугольника повторяется, описывая с большой точностью новый выпукло-преобразованный контур объекта в его новом сечении, параллельном прежнему сечению. В результате таких последовательных вертикальных перемещений плоскости рабочего стола 2 в блоке 19 памяти накапливается полная информация о координатах объемного выпукло-преобразованного контура данного объекта. Точность описания координат выпукло-преобразованной поверхности объекта (то есть поверхности, не содержащей впадин) определяется дискретами поворота стола приводом 17 вращателя и приводом 21 вертикального перемещения стола, причем приводы 17 и 21 управляются по программе задаваемой управляющей электронно-вычислительной машиной 18, в которую поступают сведения об объемной форме и местоположении группы объектов с выходов блока 19 памяти и в которой принимаются решения: об идентификации выявленных форм объектов с некоторыми эталонами, заложенными . в память электронно-вычислительной машины 18, об алгоритме дополнительного выя-вления формы тех объектов, которые не удалось выявить с необходимой полнотой вследствие затенения этих объектов другими объектами при визуализации группы объектов, одновременно расположенных на столе, о выработке тактики моторного поведения исполнительного органа робота по правильному захвату объектов в нужной по программе поставленной технологической задачи последовательности, а также о распределении управляющих воздействий и о самих величинах, таких воздействий, поступающих к приводам 2 исполнительного органа робота 22. Применение изобретения позволит выявить форму и местоположение как отдельно стоящих, так и группы объектов манипулирования, что позволит осуществлять их качественный захват. Формула изобретениия Устройство для управления адаптивным роботом, содержащее излучатель и последовательно соединенные блок памяти, электронно-вычислительную мащину и приводы исполнительного органа робота, отличающее - ся тем, что, с целью расширения функциональных возможностей устройства, оно содержит привод и датчик вращения рабочего стола, привод и датчик вертикального перемещения рабочего стола, преобразователь угол-код, вычислители координат и последовательно соединенные диссектор, формирователь строб-импульсов и логический блок каждый выход которого через последовательно соединенные преобразователь уголкод и вычислитель координат подключен к входу блока памяти, соответствующий вход которого соединен с выходом датчика вертикального перемещения рабочего стола, связанного с приводом вертикального перемещения рабочего стола, в.ход которого подлюмен к первому выходу электронно-вычислительной машины, второй выход которой соединен со входом привода вращения рабочего стола, связанного с датчиком вращения рабочего стола, выход которого подключен к соответствующим входам вычислителей координат. Источники информации, принятые во внимание при экспертизе 1.Сборник. Дистанционно-управляемые роботы-манипуляторы. Под ред. Е. П. Попова. М., Изд. «Мир, 1976, с. 99-134. 2.Сутро Л, Килмер У. Роботы становятся к сборочным линиям.-«Электроника, т. 46. № 15, 19.07.73, с. 38-39.
