(54) УСТРОЙСТВО ДЛЯ ОПРЕ.ЦЕЛЕНИЯ КООРДИНАТ ТОЧЕЧНЫХ СВЕТОВЫХ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения коор-диНАТ ТОчЕчНыХ СВЕТОВыХ Об'ЕКТОВ | 1978 |
|
SU811302A1 |
| Устройство для определения координат точечных световых объектов | 1983 |
|
SU1113822A2 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| Телевизионное следящее устройство | 1976 |
|
SU653772A1 |
| Устройство для регистрации движений глаз | 1980 |
|
SU891063A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для определения координат точечных световых объектов и может быть использовано в оптической локации, системах астронавигации и телевизионной автоматики.
По основному авт. св. 811302 известно устройство, содержащее диссектор, выход которого подключен к входу усилителя-ограничителя, а управляющие входы - к выходам цифро-аналоговых преобразователей каналов формирования сигналов координат, каждый из которых состоит из последовательно соединенных реверсивного счетчика и регистра, выход которого подключен к соответствующему цифро-аналоговому преобразователю, триггер, блЬк формирования видеосигналов, блок переключения режимов работы, синхрогенератор и формирователь следящего крестообразного растра, выходы которого соединены с управлянлцими входами диссектора, причем выход усилителя-ог раничителя подключен к входам триггера и блока обнаружения видеосигналов, выходы которых соединены соответственно с первым и вторым входеичи блока перемещения режимов работы, третий
и четвертый входы которого подключены к одним из выходов синхрогенератора, другой выход которого подключен к одному из входов формирователя следящего крестообразного растра, другой вход которого соединен с выходом блока обнаружения видеосигналов, а управляющие выходы блока переключения режимов работы подключены к со10ответствующим входам реверсивных счетчиков и регистров каналов формирования сигналов координат Cl.
Однако это устройство характеризуется низким быстродействием, свя15занным с алгоритмом сканирования следящего крестообразного растра, не учитывающим направления движения объекта.
Цель изобретения - повышение бы20стродействия устройства для опреде- ления координат точечных световых объектов.
Поставленная цель достигается тем, что в устройстве каждый из каналов
25 формирования сигналов координат устройства содержит блок вычисления скорости светового объекта, первый вход которого соединен с выходом реверсивного счетчика канала, а второй вход
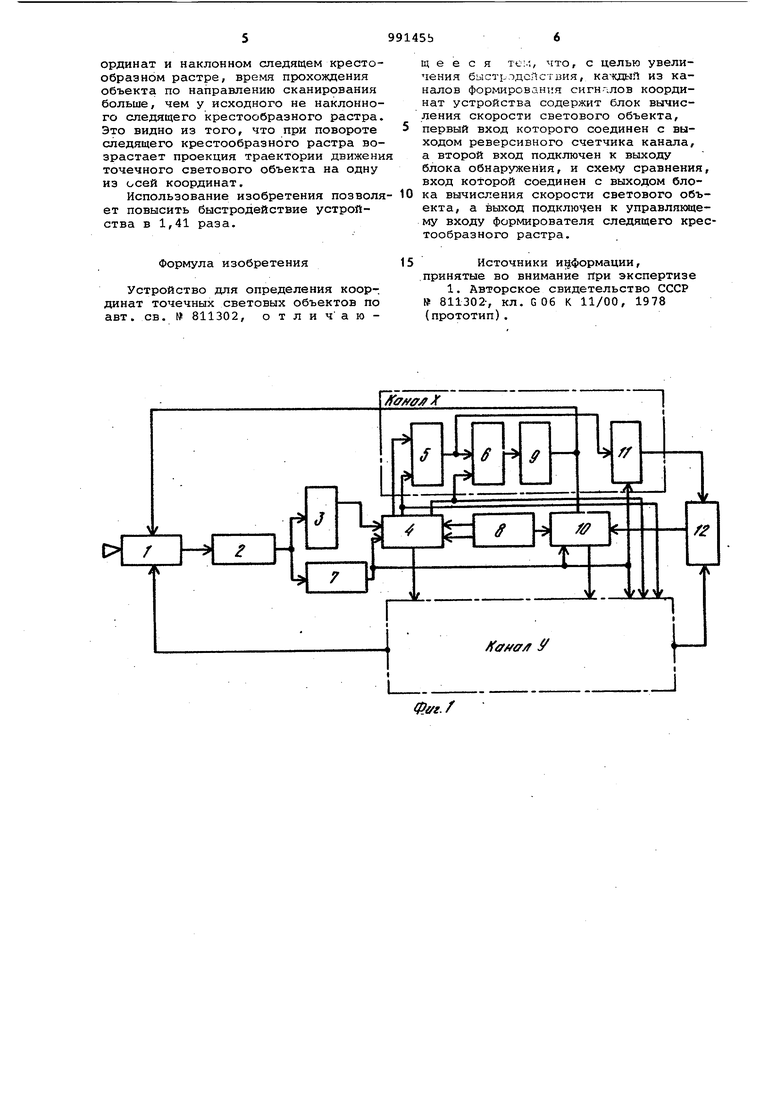
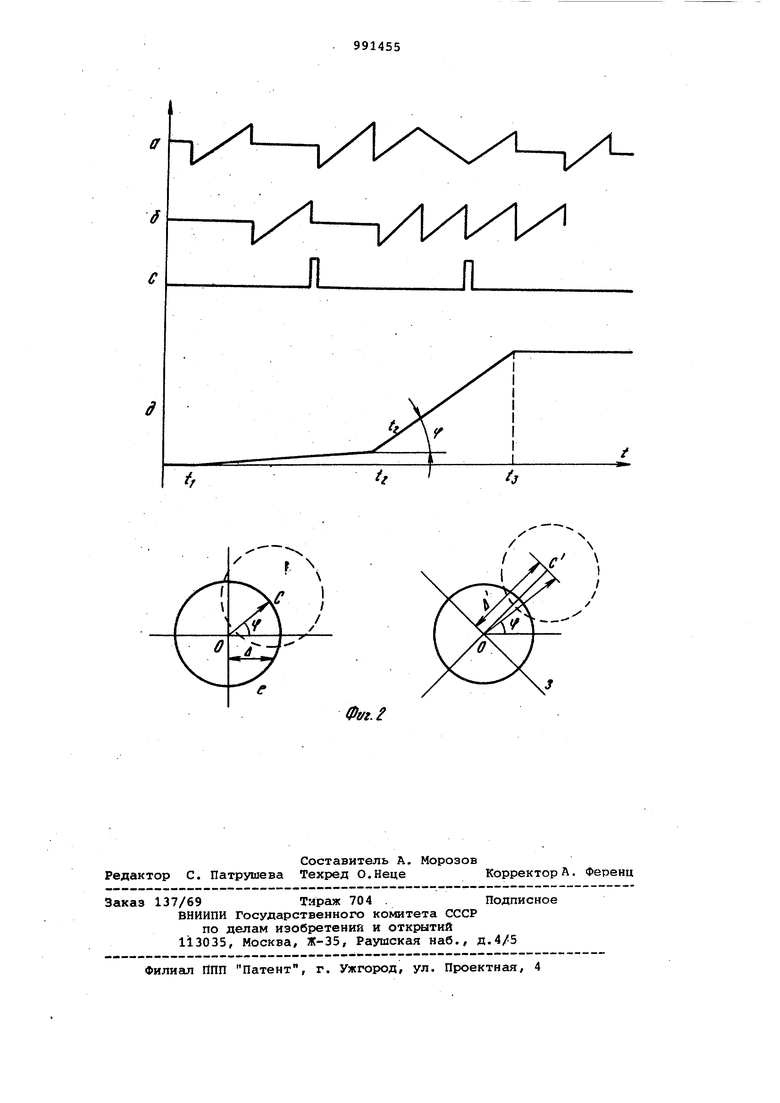
30 подключен к выходу блока обнаружения. и схему сравнения, вход которой соединен с выходом блока вычисления скорости светового объекта, а выход Подключен к управляющему входу формирователя следящего крестообразног растра. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - диаграмма работы устройства. Устройство включает диссектор 1, видеоусилитель-ограничитель 2, триг гер 3, блок 4 переключения режимов, реверсивный счетчик 5, регистр б, блок 7 обнаружения, синхрогенератор цифро-аналоговый преобразователь 9, формирователь 10 следящего крестооб разного растра, блок 11 вычисления скорости светового объекта, схему 12 сравнения. Устройство работает следующим об разом. В режиме поиска по строкам и по кадрам формируются ступенчато-пилообразные напряжения, создаюгцие поис вый растр. Это обеспечивается тем, что поступающие с синхрогенератора 8 импульсы через реверсивный счетчик 5 и регистр б (который в этом режиме прямо передает код, поступающий с реверсивного счетчика, так как на е управляющий вход подан потенциал ло ги еской 1 с блока 4) в виде двоичн го кода поступают на цифро-аналоговы преобразователь 9, который .преобразу ет число в ток, отклоняющий апертуру диссектора по сторонам и кадрам. Ре версирование счетчиков происходит при их переполнении. .„ При обнаружении точечной светового объекта приходящий видеосигнал перебрасывает триггер 3, и блоком режимов поисковая развертка останав ливается. Выставляется следящий кре тообразный растр, который вырабатывается формирователем 10 следящего крестообразного растра из импульсов поступающих с синхрогенератора 8. При опознавании обнаруженного объекта по нескольким селективным признакам (частоте, фазе, амплитуде видеосигнала) блоком 7 обнаружения выдается потенциал логической единицы, переводящий устройство в режим определения координат. При этом в регистре запоминается число, грубо определенное в поиске координаты объекта, а изображение точечного объекта сканируется крестообразным растром (фиг. 2 а,б,е).. В режиме определения координат реверсирование счетчика 5 канала X (канал У работает аналогично) производится импульсами, жестко связанными с центром следящего крестообраз него растра. Таким образом указанный счетчик суммирует импульсы видеосигнала слева до центра следящего крестообразного растра, а вправо от центра растра вычитает количество пришедших импульсов видеосигнала из числа ранее накопленных импульсов. По окончанию сканирования по обеим координатам оставшееся в счетчике число однозначно характеризует рассогласование между центром изображения объекта на фотокатоде диссектора и центром следящего крестообразного растра. В этом режиме работы перепись числа из реверсивного счетчика 5 в регистр б, а следовательно, и совмещение центра следящего крестообразного растра с центром изображения объекта на фотокатоде диссектора производится импульсом (фиг. 2 с) одновременно по каналам формирования сигнгшов координат. Блок 11 вычисления скорости светового объекта,определяет абсолютное значение скорости по координатной оси X и У. Полученные в разных каналах значения сравниваются схемой 12 сравнения и в момент равенства скоростей схема 12 сравнения формирует сигнал, поступающий в формирователь следящего крестообразного растра 10. При этом следящий крестообразный растр поворачивается на-угол Ч 45° относительно прежнего положения (фиг. 2 3 ). При неизменном периоде сканирования следящего крестообразного растра отработка рассогласования между центром растра и центром изо бражения объекта осуществляется аналогично. При нарушении условия равенства скоростей система переходит в исходное состояние. Блок вычисления скорости светового, объекта выполнен на обычном реверсивном счетчике, так как скорость перемещения светового объекта за период сканирования есть разница в количестве импульсов видеосигнала относи-т тельно. центра следящего крестообразного растра при импульсном излучении света точечным объектом. Выделение этой разницы может осуществиться реверсированием счетчика импульсами, жестко связанными с центром следящего крестообразного растра. Для повышения точности вычислений определенное значение скорости усредняется за W циклов сканирования следящего крестообразного растра. В режиме поиска этот счетчик обнуляется. Быстродействие устройства для определения координат точечных световых объектов повышается за счет возможности коммутации наклона следящего крестообразного растра в зависимос.ти от траектории движения точечного светового объекта при равенстве скоростей по каналам формирования сигналов координат. При движении точечного светового объекта под углом Ч к направлению горизонтальной оси координат и наклонном следящем крестообразном растре, время прохождения объекта по направлению сканирования больше, чем у исходного не наклонного следящего крестообразного растра Это видно из того, что при повороте следящего крестообразного растра возрастает проекция траектории движени точечного светового объекта на одну из осей координат. Использование изобретения позволя ет повысить быстродействие устройства в 1,41 раза. Формула изобретения Устройство для определения координат точечных световых объектов по авт. св. № 811302, отличаю
/fff/ ffj X
Уфу
I
/fffffffA у
Й//./ щ е е с я тем, что, с целью увеличения быстродействия, ка-«дыП из каналов формирования сигн.-1лов координат устройства содержит блок вычисления скорости светового объекта, первый вход которого соединен с выходом реверсивного счетчика канала, а второй вход подключен к выходу блока обнаружения, и схему сравнения, вход которой соединен с выходом блока вычисления скорости светового объекта, а выход подключен к управлякяцему входу формирователя следящего крестообразного растра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 811302-, кл. G 06 К 11/00, 1978 (прототип). (7 1|Ш .и г/ и
фуг. 2
