1
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в оптической локации, телевизионных автоматах и системах астронавигации.
Известное устройство для определения координат точечного светового объекта 1, содержащее телевизионную трубку с отклоняющей системой, блоки слежения и формирования сигналов координат, обладает низкой точностью и термостабильностью, поскольку устройство является аналоговым.
Наиболее близким по технической сущности к предлагаемому техническому рещению является устройство для определения координат точечных световых объектов 2, содержащее диссектор, выход которого подключен ко входу усилителя-ограничителя, а управляющие входы - к выходам цифро-аналоговых преобразователей (ЦАП) каналов формирования сигналов координат, каждый из которых состоит из последовательно соединенных реверсивного счетчика и регистра, выход которого подключей к соответствующему ЦАП.
Однако в этом устройстве нельзя достичь высокой точности определения координат вследствие зависимости точности от размеров сканирующей апертуры диссектора и освещенности фона.
Целью изобретения является повыщение точности работы устройства.
Эта цель достигается тем, что предложенное устройство содержит триггер, блок формирования видеосигналов, блок переключения режимов работы, синхрогенератор и формирователь следящего крестоообразного растра, выходы которого соединены с управляющими входами диссектора. Выход усилителя-ограничителя подключен ко входам триггера и блока обнаружения видеосигналов, выходы которых соединены соответственно с первым и вторым входами блока переключения режимов работы, третий и четвертый входы которого подключены к одним из выходов синхрогенератора, другой выход которого подключен к одному из входов формирователя следящего крестообразного растра, другой вход которого соединен с выходом блока обнаружения видеосигналов, а управляющие выходы блока переключения режимов работы подключены к соответствующим входам реверсивных счетчиков и регистров каналов формирования сигналов координат.
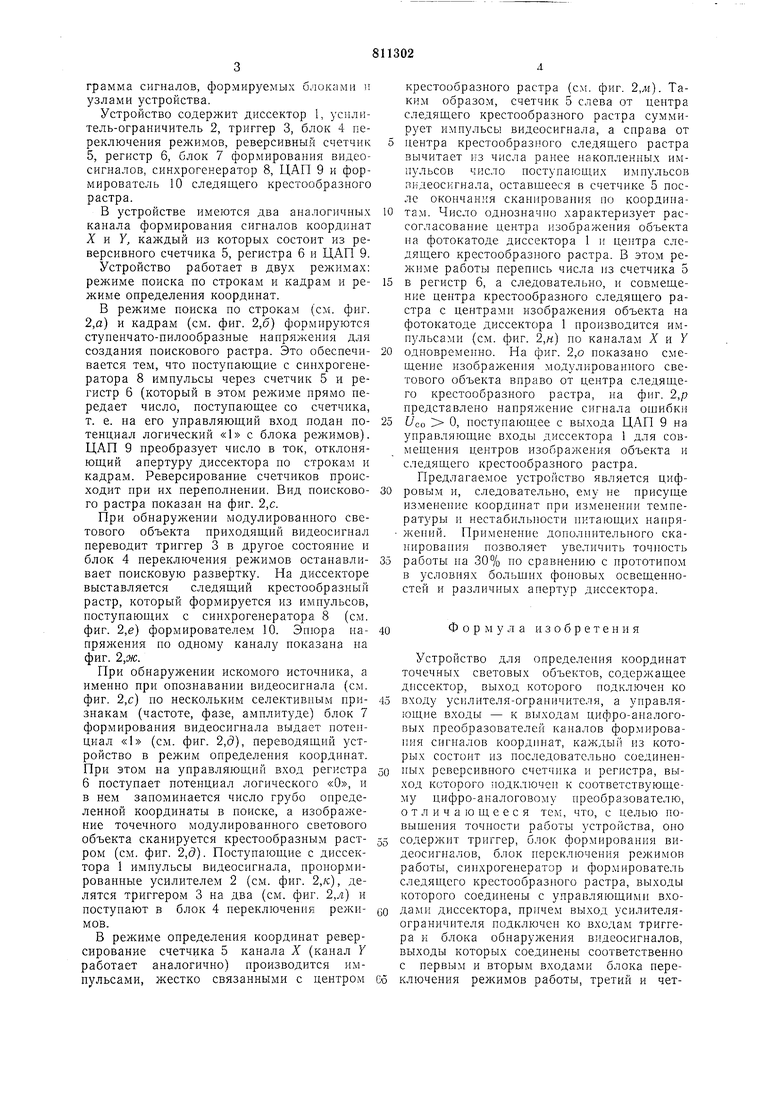
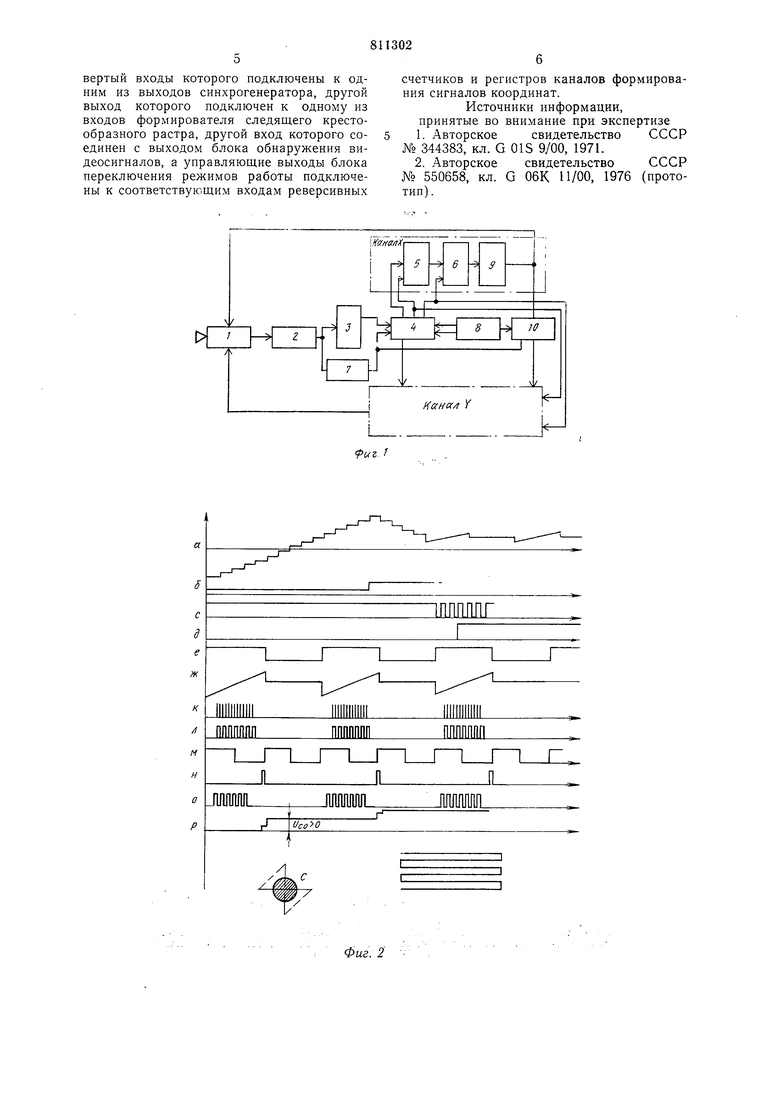
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - временная диаграмма сигналов, формируемых блоками и узлами устройства.
Устройство содержит диссектор 1, усилитель-ограничитель 2, триггер 3, блок 4 переключения режимов, реверсивный счетчик 5, регистр 6, блок 7 формирования видеосигналов, синхрогенератор 8, ЦАП 9 и формирователь 10 следящего крестообразного растра.
В устройстве имеются два аналогичных канала формирования сигналов координат X и Y, каждый из которых состоит из реверсивного счетчика 5, регистра 6 и ЦАП 9.
Устройство работает в двух режимах: режиме поиска по строкам и кадрам и режиме определения координат.
В режиме поиска по строкам (см. фиг. 2,а) и кадрам (см. фиг. 2,6) формируются ступенчато-пилообразные напряжения для создания поискового растра. Это обеспечивается тем, что поступающие с синхрогенератора 8 импульсы через счетчик 5 и регистр 6 (который в этом режиме прямо передает число, поступающее со счетчика, т. е. на его управляющий вход подан потенциал логический «1 с блока режимов). ЦАП 9 преобразует число в ток, отклоняющий апертуру диссектора по строкам и кадрам. Реверсирование счетчиков происходит при их переполнении. Вид поискового растра показан на фиг. 2,с.
При обнаружении модулированного светового объекта приходящий видеосигнал переводит триггер 3 в другое состояние и блок 4 переключения режимов останавливает поисковую развертку. На диссекторе выставляется следящий крестообразный растр, который формируется из импульсов, поступающих с синхрогенератора 8 (см. фиг. 2,е) формирователем 10. Эпюра напряжения по одному каналу показана на фиг. 2,ж.
При обнаружении искомого источника, а именно при опознавании видеосигнала (см. фиг. 2,с) по нескольким селективным признакам (частоте, фазе, амплитуде) блок 7 формирования видеосигнала выдает потенциал «1 (см. фиг. 2,(Э), переводящий устройство в режим определения координат. При этом на управляющий вход регистра 6 поступает потенциал логического «О, и в нем запоминается число грубо определенной координаты в поиске, а изображение точечного модулированного светового объекта сканируется крестообразным растром (см. фиг. 2,д). Поступающие с диссектора 1 импульсы видеосигнала, пронормированные усилителем 2 (см. фиг. 2,/с), делятся триггером 3 на два (см. фиг. 2,л) и посТупанэт в блок 4 переключения режимов.
В режиме определения координат реверсирование счетчика 5 канала X (канал У работает аналогично) производится импульсами, жестко связанными с центром
крестообразного растра (см. фиг. 2,м). Таким образом, счетчик 5 слева от центра следящего крестообразного растра суммирует импульсы видеосигнала, а справа от центра крестообразного следящего растра вычитает из числа ранее накопленных импульсов число поступающих импульсов видеосигнала, оставшееся в счетчике 5 после окончания сканирования по координатам. Число однозначно характеризует рассогласование центра изображения объекта на фотокатоде диссектора 1 и центра следящего крестообразного растра. Б этом режиме работы перепись числа из счетчика 5
в регистр 6, а следовательно, и совмещение центра крестообразного следящего растра с центрами изображения объекта на фотокатоде диссектора 1 производится импульсами (см. фиг. 2,н) по каналам X и Y
одновременно. На фиг. 2,о показано смещение изображения модулированного светового объекта вправо от центра следящего крестообразного растра, на фиг. 2,р представлено напряжение сигнала ошибки
f/co О, поступающее с выхода ЦАП 9 на управляющие входы диссектора 1 для совмещения центров изображения объекта и следящего крестообразного растра.
Предлагаемое устройство является цифровым и, следовательно, ему не присуще изменение координат при изменении температуры и нестабильности питающих напряжений. Применение дополнительного сканирования позволяет увеличить точность
работы на 30% по сравнению с прототипом в условиях больших фоновых освещенностей и различных апертур диссектора.
Формула изобретения
Устройство для определения координат точечных световых объектов, содержащее диссектор, выход которого подключен ко
входу усилителя-ограничителя, а управляющие входы - к выходам цифро-аналоговых преобразователей каналов формирования сигналов координат, каждый из которых состоит из последовательно соединенных реверсивного счетчика и регистра, выход которого подключен к соответствующему цифро-аналоговому преобразователю, отличающееся тем, что, с целью повышения точности работы устройства, оно
содержит триггер, блок формирования видеосигналов, блок переключения режимов работы, синхрогенератор и формирователь следящего крестообразного растра, выходы которого соединены с управляющими входами диссектора, причем выход усилителяограничителя подключен ко входам триггера и блока обнаружения видеосигналов, выходы которых соединены соответственно с первым и вторым входами блока переключения режимов работы, третий и четвертый входы которого подключены к одним из выходов синхрогенератора, другой выход которого подключен к одному из входов формирователя следящего крестообразного растра, другой вход которого соединен с выходом блока обнаружения видеосигналов, а управляющие выходы блока переключения режимов работы подключены к соответствующим входам реверсивных
счетчиков и регистров каналов формирования сигналов координат.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 344383, кл. G. 01S 9/00, 1971.
2.Авторское свидетельство СССР № 550658, кл. G 06К И/ОО, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат точечных световых объектов | 1983 |
|
SU1113822A2 |
| Устройство для определения координат точечных световых объектов | 1981 |
|
SU991455A2 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОШЕНИЯ РАЗМАХА ВИДЕОСИГНАЛА К ЭФФЕКТИВНОМУ ЗНАЧЕНИЮ ФЛУКТУАЦИОННОЙ ПОМЕХИ | 1985 |
|
SU1276050A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННАЯ ЦИФРОВАЯ СИСТЕМА ДЛЯ ДИАГНОСТИКИ ПАРАМЕТРОВ ПУЧКОВ | 1989 |
|
SU1732781A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
| Способ обработки графической информации | 1987 |
|
SU1501111A1 |
| Устройство коррекции телевизионного сигнала | 1988 |
|
SU1628224A1 |
с
е
ж
ЖШШЕ.
