.- . ,. Изобретение относится к области автоматики и вычислительной техники. Оно может быть использовано в системах с числовым Программным управлеиием для подготовки исходной числсао информации управляющим устройством . и для формирования шаговых траекторий исполнительных органов. Известно устройство, содерж амдее сумматоры/ регистр, компаратор, логическне элементы и триггеры. Это устройство используется в. Системах с числовым управлением для формирова ния линейных, круговых и параболичес к их траекторий 1. Недостатком этого устройства явл ется его сложность, т.е. наличие накапливающейся ошибки при формировании траекторий. При эт(4 оно не обес печивает подготовку исходных данных (иачальных условий) для устройств, формирующих отрезки траекторий в режиме интерполяции. Известно также устройство, содер жащее сумматоры, компаратор, логические элементы. Это устройство пред назначено для формирования траекторий в системах с числовым программным управлением 2. Недостатком этого устройства является то, что оно не позволяет выполнять подготовку исходной информации для устройств, формирующих траектории в режиме интерполяции. Наиболее близким техническим решением к предлагаемому является интерполятор, содержащий счетчики и сумматоры, ко входам которых подключены выходы счетчиков. Сущность формирования траекторий с помощью этого интерполятора, заключается в расчете узловых точек, совежупность и последовательность кс горых представляет определенную траектрршо. Этот интерполятор предназначен для расчета узловых точек в режиме интерполяции, т.е. между заданными опорными точкаMi 3.. Недостатком тевсого интерполятора является то, что он не обеспечивает выполнения обратного процесса интерполяции,- т.е. расчета координат опорных точек по заданной последовательности узловых точос. Из-за этого недостатка данный интерполятор не может быть использован для. подготовки инфорУ1ации, необходимой для формирования траекторий в режиме интерполяции.
Цель изобретения - расширение области применения интерполятора.
Поставленная, цель достигается тем что интерполятор, содержащий первый сумматор первый вход которого соединен с первым выходом интерполятора, с первым входом второго сумматора и с выходом первого счетчика, а второй вход - со вторым выходом интерполятора, со BTOiXiiM входом второго сумматоi e и с выходом второго счетчика, первый вход которого и первый вход пер-вого счетчика, соединены с первыми входами интерполятора, а первый и второй выходы первого сумматора подсоединены соответственно к третьему и четвертому выходам интерпопятора, содержит блок элементов задержки и элемент И-НЕ, выход которого соединен с пятым выходом интерполятора, а входы - с первым выходом первого и выходом второго сумматоров, первые выходы блока элементов задержки подключены ко вторым входам первого и второго счетчиков соответственно, третий и четвертый выходы - к третьим и четвертым входам nejpsoro и второго сумматоре соответственно, пятый и шестой выходы к пятым входам первого и второго сумматоров, первые входы - ко вторым входам интерполятора, а BTOtxje входл - к первому и второму выходам первого сумматора, шестой вход -которого и шестой вход второго сумматора соединены с третьим и четвертым входами интерполягора.
Введение в интерполятор блока
элементов задержки, элемента И-НЕ и новых связей позволило дополнительно выполнять обратный процесс интерполяции, что расширило класс решаемых устройством задач и область его применения.
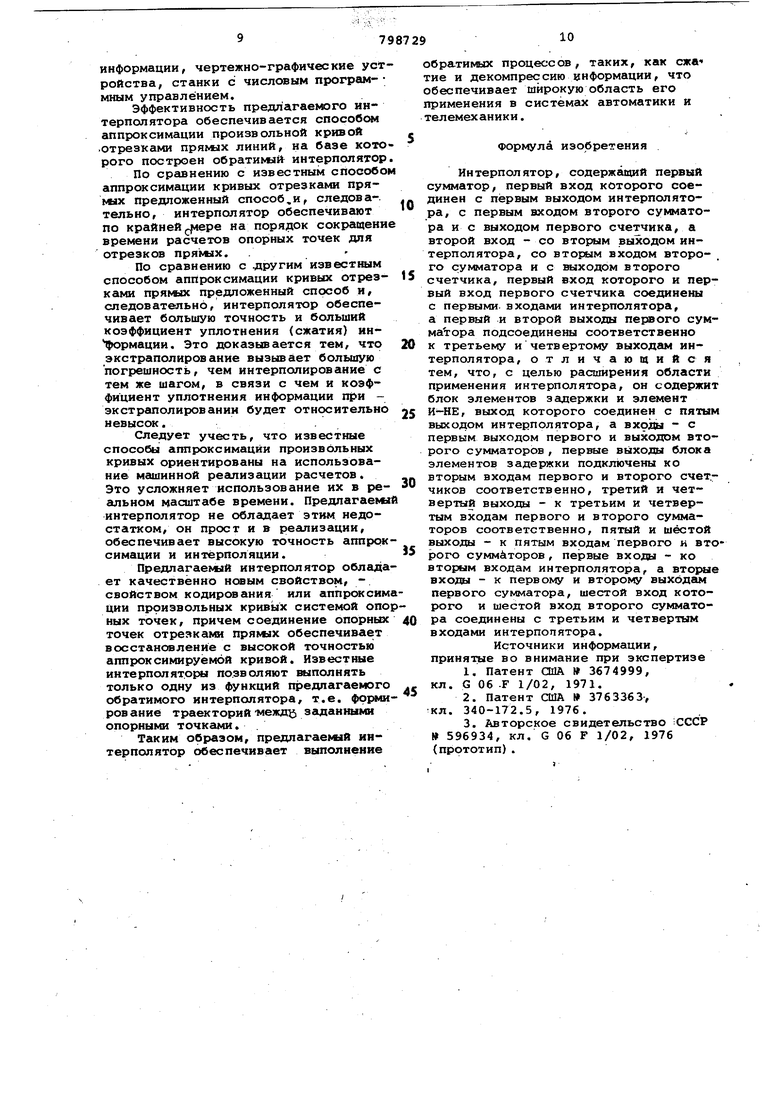
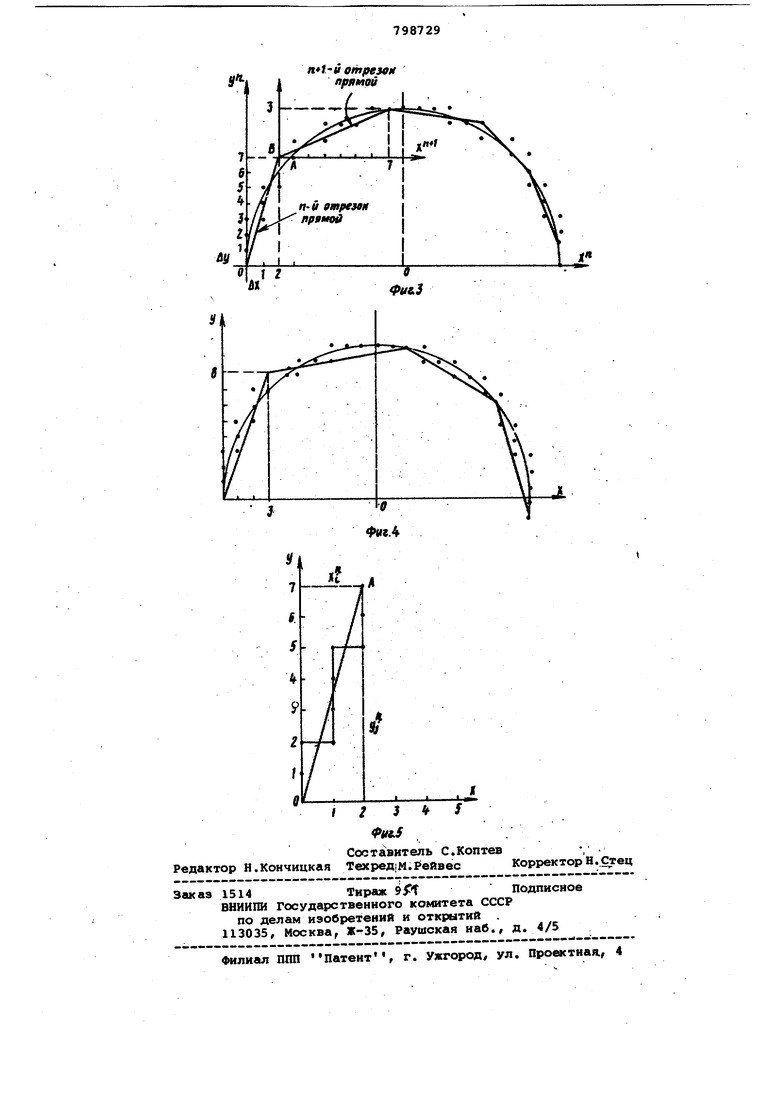
Йа фиг. 1 представлена блок-схема интерполятора; на фиг. 2 - график, поясняющий принцип его работы; на фиг. 3 и фиг. 4 -. окружность, аппроксимированная с помощью данного интерполятора с различной точностью; на фиг. 5 - пример линейной интерполяции/ выполненный с помощью этого интерполятора.
Интерполятор (см. фиг. 1) содержит первый 1 и второй 2 счетчики, первый 3 и второй 4cy aтopы, блок элементов задержки 5, элемент И-НЕ б, выходные шины 7 и 8 счетчиков 1 и 2 соответственно, вторые входы 9 и 10 интерполятора, входные шины 11. и 12 счетчикса 1 и 2 соответственно, третий 13 и четвертый 14, шестой 15 и пятый 16 выходы блока 5, первый выход 17 сумматора 3, выход 18 сумматора 4, второй выход 19 сумматора 3, первые входы 20 и 21 интерполятора, пятый выход 22 интерполятора, третий 23 и четвертый. 24 в ходы,интерполятора и первый 25, второй 26, третий
27 и четвертый 28 выходы интерполятора .
Счетчики 1 и 2 служат для счета приращений координат в режиме обратной интерполяции и используются в качестве регистров в режиме линейной интерполяции; сумматоры З.и 4, например, параллельного действия, предназначены для расчета значений оцено ных функций; блок 5 элементов задержкн служит для задержки сигналов, посТупающих на входы и выходы 17 и 19; элемент И-НЕ 6 служит для сравнения знаков содержимого сумматора 3 и 4 и выработки сигнала на выход 22, когда знаки содержимого сумматоров 3 и 4 равны.
Принцип обратной линейной интерполяции, т.е. расчета приращений координат между опорнымн точками и определения момента, когда нарушается линейность расположения узловых точек заключается в следующем.
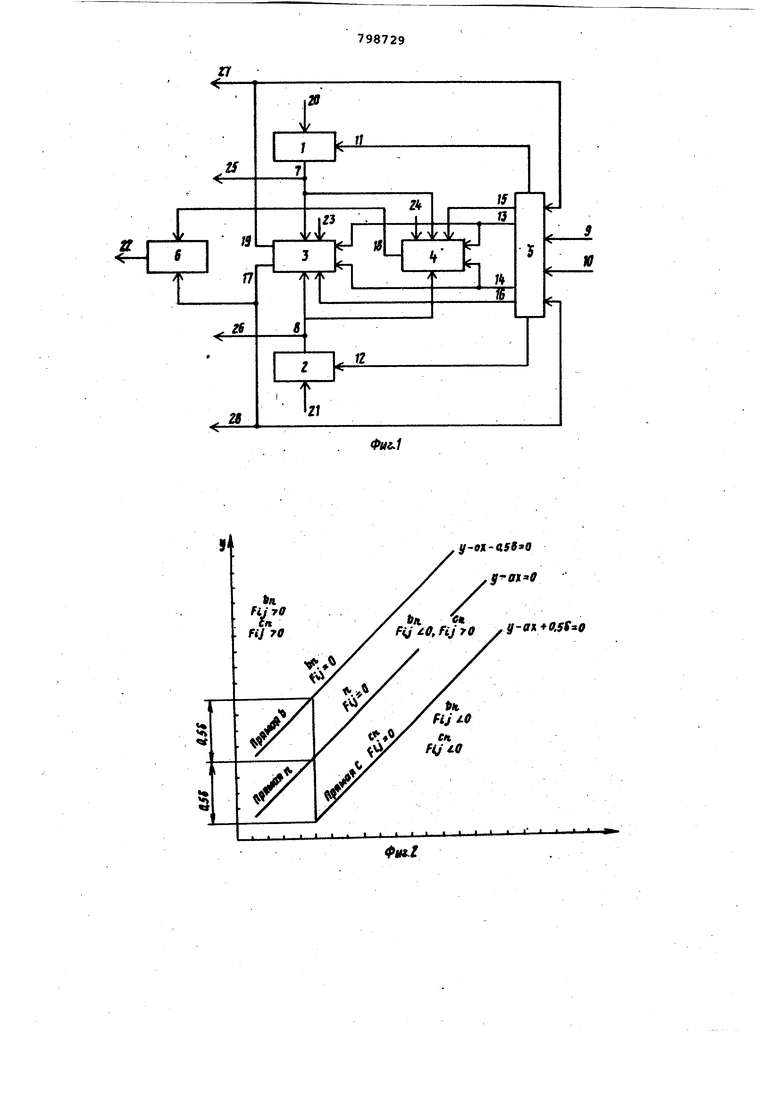
В реальных условиях, в силу конечности разрядной сетки устройств, считьшание информации об отрезке гладкой прямой (фиг. 2), например, вида
у - ах О(1)
выполняется в дискретной системе координат с шагами квантования д.х и А. у. Аналогом выражения (1) в дискретной системе координат для отрезка Прямой п является выражение
У - . V J Р. /о
1 и i )
где ,у, - узловые точки, располо женные возле отрезка прямой п; а--у//х - эквивалент коэффициента наклона отрезка прямой
и
оценочная функция,харак теризующая отклонение узловых точек х, у. от прямой п.
Существует следующая закономер.ность для узловых точек, расположенных на отрезке прямой п, значение F 0; для узловых точек, расположённых Нсщ отрезком этой прямой, значение F, Oi для узловых точек, расположенных под отрезком этой прямой, значение F,j 0.
Реёшизацию способа определения принадлежности узловых точек х|; ,yj отрезку прямой л ведут следующим образом. По отношению к отрезку прямой п проводится (фиг. 2) две параллельные прямее, а именно, вида (в)
у - ах - 0,5 СГ О(3)
и вида (с)
у - ах + 0,5 tf О,(4)
которые создают коридор сГ , по середине которого расположен отрезок прямой п.Ширину коридора можно задавать изменяя величину . Считается, что все узловые точки, расположенные внутри этого коридора, принадлежат отрезку прямой п. Из закономерности расположения знаков оценочной функции по отношению к Ътрезку прямой следует, что внутри коридора rf значения F и Pf вычисленные для npHNUx Ь и с имею разные знаки, а вне этого коридора .значения F, и Ff имеют одинаковые знаки. Это обстоятельство используется для определения прингшлежности узловых точек х у; отрезку прямой п. Конец отрезка прямой п определяется моментом обнаружения узловой Уочки, не принадлежащей коридору f . В интегральной форме выражения (1), (3) и (4)имеют вид I dy - а Г dx 0(5) Выполнив переход из непрерывной система координат в дискретную систему координат, и.таким образом, от интегральной формы зетиси уравнений к форме записи с использованием сумм получены выражения, описывающие процесс вычисления значений РЛ и в предложенном обратимом интерполятэ (6) (xb)|..-.jL.VO. V где л.х ьу; - элементарные шаги, выполняемое копировальным органом при следовании вдоль прямой п п - индекс отрезка прямой. Правило расчет значений fP и F, следующее. Если копировальный оргай выполняет шаг &х, то в выражении (6) и (7) значение i увеличивается на единицу; если выполняется шаг &у: то в этих выражениях увеличивается значение j на единицу. Логическое условие принадлежности узловых точек отрезку прямой п следую |цее siy.F.. (в) fim f - i О 8лт, Ч 10.вслмFff 0 laecKv. К Вели при съеме информации о прои вольной кривой копировальный орган проходит.через узловую точку, для ко торой нарушается условие (8), то с этой точки формируется новый п-Игй бтреэок прямой с узловыми точками xj , У . Последняя узловая точка х , у выд ется в качестве опорной точки п-й пр мой. Совокупность отрезков прямых п аппроксимирует произвольную кривую при этом кгикдый отрезок определяется опорными точками в виде прир шений W V . Xj Vj Обратным процессу сглаживания (аппроксимации) дискретного набора данных характеризующих произвольную кривую в дискретной системе координа :является процесс интерполяции, т.е. расчет узловых точек между заданными опорными точками в виде приращений Процесс интерполяции в предложенном интерполяторе описывается выражением..V, ч. v - г v F (9) Z .-) 1 01гО где ,у- - приращения отрезков . Значительно структурное сходство выражений (6), (7) и (9) позволяет доработать интерполятор и для формиро Яания линейных приращений. Правило формирования траекторий с использованием выражения (9) следующее. Если F О, то выполняется элементарный шаг дх, в выражении (9) к значению 1 прибавляется единица если ,,- 0, то выполняется элементарный шаг &у, а в выражении (9)-к значению j прибавляется единица. Работа интерполятора в режиме обратимой интерполяции происходит путем формирования отрезков прямвьос линий, аппроксимирующих окружность, представленную на фиг. -3. Процесс расчета (сГ 2) опорных точек для отрезков прямых, представленных на фиг. 3, выполняется в интерполяторе. , В этом режиме на входы 9 и 10 . интерполятора поступают сигналы дх, йУ, которые соответствуют выпблнению элементарных приращений при движении от одной узловой точки кривой к соседней узловой точке, например, из точки О в точку 1 (шаг ) , Приращения координат опорных точек х, у. для п-го отрезка прямой нёцсапливаются в счетниках 1 и 2 соответственно. В начгшьном состоянии (НС) в суммато1Ш 3 и 4 по входам 23 и 24 заносятся значения чисел 0,5(f и -0,5(} соответственно, а счетчики 1 и 2 устанавливаются в нулевое положение. По мере поступления импульса элементарного приращения лх на вход 9, вырабатывается команда Вычесть, поступающая на управляющие входы сумматоров 3 и 4 с выхода 13. По этой команде из содержимого сумматоров 3 и 4 вычитается содержи- , мое счетчика 2, при этом из содержимого сумматора 4 дополнительно вычитается единица, поступающая на младший разряд с выхода 15. При поступлении импульса элементарного приращения лу на .вход 10, вырабатьшается команда Сложить , поступающая на управляющие входы сумматоров 3 и 4 с выхода 14. По этой команде к содержимому сумматоров 3 и 4 прибавляется- содержимое счетчика 1, а в младший разряд сумматора 3 дополнительно прибавляется единица, поступающая на вход сумматора 3 с выхода 16. После выполнения арифметических операций в сумматорах. 3 и 4 выполняется сравнение знаков содержимого об их сумматоре. Если содержимое сумматоров 3 и 4 имеют разные знаки, то это значит, что данная узловая точка принадлежит отслеживаемому ртрезку прямой, В этом случае на выходе элемента И-НЕ б сигнал отсутствует. Выработка сигнгша на выходе элемента И-НЕ 6 осуществляется в зависимости от значения знаковых разрядов сумматоров 3 и 4, подключенных ко входам схекы И-НЕ 6 с выходами 17 и 18 Вели содержимоесумматоров 3 и имеют одинаковые знаки, то на выходе элемента И-НЕ б появляется сигнал свидетельствукпций о том, что данная узловая точка (например, точка А на ФИГ, 3) не принадлежит отрабатываемому отрезку прямой. Вследствие заде ки снгнапсе, поступающих на входы 9 и 10/ через элеменхы блока 5 задерж ки, поступаю&дах на входы счетчиков 1 и 2 по шинам 11 и 12, в счетчиках 1 и 2 накаплившотся значения приращений для предыдущей узловой точки. Например, при расчете координат точ ки А в счетчиках 1 и 2 накоплены приращения координат для точки в (Фиг. 3). Значения этих приращений по шинам 7 и 8 поступают на вцход обратимого интерполятсфа в виде при ращений косчрдинат (х. 2. у/ 7, фиг. 3) . После того, как на выход интерполятора поступают приращения опорных точек для п-го отрезка прямой начинается отработка нового (п + 1) го отрезка прямой. Счетчики 1 и 2 снова устанавливаются в начальное со тояние (НС), а в сумматоры 3 и 4 по входам 23 и 24 заносятся значения 0,5cfH -0,5cf и, таким образом, интерполятор готов к отработке следующ го отрезка прямой. При этом значения приращений следующего отрезка прямой, (п + 1)-го, вычисляются в новой относительной системе координат , и т.д. Таким образом, для каждогб отрез ка систеккл прямых линий, аппроксими рукщих произвольную кривую, выдаются по шинам 7 и 8 приращения координат опорных точек х, у-..С помощью пред ложенного интерполятора получать и абсолютные координаты опорных точек отрезков прякых/ для чего достаточно просуммировать сигналы, пост пающие-по шинам 11 и 12. Если процесс отрабо1;ки (п + 1)-г отрезка прямой прекращается до того, как обнаружится узловая точка, не принадлежащая этому отрезку прямой, то на выход интерполятора подаются. текущие значения приращений, накопле ные в счетчиках 1 и 2. Для изменения ширины коридора ап проксимации кривой достаточно на вхо сумматора 3 и 4 подать. соответствующ значения +0, и -О,5rf по входам 23 и 24,причем величина d в этом случае характеризует ширину коридора аппроксимации. Пример аппроксимации окружности при (rf 10) приведен на фиг.4. Работу интерполятора в режиме интерполяции рассмотрим на примере формирования отрезка линейной траектории, представленной на фиг. 5. В этом режиме на вход 20 и 21 подаются соответственно значения приоаиений опорных точек х, yj (например,х 2,у| 7 на фиг. 5) для п-го отрезкафо1)1 мруемой траектории, а на вход 23 подается начальное значение оценочной функции для этого отрезка, равное величине 0,5 (xj - уМ . В этом режиме сумматор 4 и элемент И-НЕ 6 не Используются, а счетчики 1 и 2 исполь Эуются в режиме регистров, т.е. содержимое счетчиков в процессе формирования линейной траектории не меняется. Формирование траекторий выполняется путем выработки импульсов дх, АУ элементарных приращений, которые поступают На выходы 17 и 19. Эти импульсы вырабатываются в зависимости от значения знакового разряда сумматора 3, Импульсы с выходов 17 и 19 поступают в дальнейшем на исполнительный орган, отрабатывающий формируемую траекторию, и, через элементы задержки блока 5, на вход сумматора 3 по шинам 13 н 14., Если значение знакового разряда сумматора 3 положительноеj то на выходе 17 появляется сигнал дх, а на выходе - 13 команда Вычесть, по которой в следующем цикле из содержимого сумматора 3 вычитается содержимое счетчика 2. Если значение знакового разряда сумматора 3 отрицательное, то на выходе 19 появляется сигнал ду, а на выходе 14 команда Сложить, по которой в следующем цикле к содержимому сумматора 3 прибавляется содержимое счетчика 1. Процесс формирования линейной траектории прекращается, .когда исполнительный орган прндет в опорную точку с координатами х, у. (точка А на фиг. 5) . Разработка такого интерполятора вызвана необходимостью создания высокоэффективного и в то же время простого устройства, . сочетающего в себе функции кодирования графической или телеметрической информации и обратного процесса, т.е. формирования шаговых траекторий или восстановления закодированной информации. Интерполя-: тор предназначен в первую очередь для выполнения функций, которые имеют место в системах программного управления движением исполнительных органов автоматизированных устройств, таких как коднрювщикн графической
информации, чертежно-графические устройства, станки с числовым програм- мным управлением.
Эффективность предлагаемого интерполятора обеспечивается способом аппроксимации произвольной кривой отрезками прямых линий, на базе которого построен обратимлй интерполятор.
По сравнению с известным способом аппроксимации кривых отрезками прякых предложенный способен, следова-, тельно, интерполятор обеспечивают по крайней ере на сокращение времени расчетов опорных точек для отрезков пряшх.
По сравнению с лругим известным способом аппроксимации кривых отрезками прямых предложенный способ и, следовательно, интерполятор обеспечивает большую точность и больший коэффициент уплотнения (сжатия) ин рмации. Это доказывается тем, что экстраполирование вызывает болыоую погрешность, чем интерполирование с тем же шагом, в связи с чем и коэффициент уплотнения информации при экстраполировании будет относительно невысок..
Следует учесть, что известные способы аппроксимации произвольных кривых ориентированы на использование машинной реализации расчетов. Это усложняет использование их в реальном масштабе времени. Предлагаемый интерполятор не обладает этим недостатком, он прост и в реализации, обеспечивает высокую точность аппроксимации и интерполяции.
Предлагаемой интерполятор обладает качественно новым свойством, свойством кодирования или аппроксима Ции произвольных кривых системой опор ных точек, причем соединение опорных точек отрезками прямых обеспечивает восстановление с высокой точностью аппроксимируемой кривой. Известные интерполяторы позволяют выполнять только одну из функций предлагаемого обратимого интерполятора, т.е. формирование траекторий-межд заданными опорными точками. .
Таким образом, предлагаемый интерполятор обеспечивает выполнение
обратиных процессов, таких, как ежа тие и декомпрессию информации, что обеспечивает широкую область его применения в системах автоматики и телемеханики.
формула изобретения .
Интерполятор, содержащий первый сумматор, первый вход которого соединен с первым выходом интерполято0ра, с первым входом второго сумматора и с выходом первого счетчика, а второй вход - со вторым выходом интерполятора, со вторым входом второго cyvwaTopa и с илходом второго
s счетчика, первый вход которого и первый вход первого счетчика соединены с первыми, входами интерполятора, а первый и второй выходы первого сумматора подсоединены соответственно
0 к третьему и четвертому выходам интерполятора, отличающийся тем, что, с целью расширения области применения интерполятора, он содержит блок элементов задержки и элемент И-НЕ, выход которого соединен с пятым
5 выходом интерполятора, а входы - с первым выходом первого и выходом второго сумматоров, первые выходы блока элементов задержки подкл10чены ко вторым входам первого и второго счет0чиков соответственно, третий и четвертый выходы - к третьим и четвертым входам первого и второго сумматоров соответственно, пятый и шестой выходы - к пятым входам первого и вто5рого сумматоров, первые входы - ко вторым входам интерполятора, а вторые входы - к первому и второму выходам первого сумматора, шестой вход которого и шестой вход второго суммато0ра соединены с третьим и четвертым входами интерполятора.
Источники информации, принятые во внимание при экспертизе
1.Патент ОНА 3674999, кл. G 06 -F 1/02, 1971.
5
2.Патент США 3763363, кл. 340-172.5, 1976.
3.Авторское свидетельство ;СССР 596934, кл. G 06 F 1/02, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для интерполяции и кусочно- линейной аппроксимации | 1977 |
|
SU734709A1 |
| Интерполятор | 1983 |
|
SU1108395A1 |
| Устройство для формирования шаговых траекторий | 1979 |
|
SU930262A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Интерполятор | 1983 |
|
SU1089551A1 |
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Интерполятор | 1987 |
|
SU1596346A1 |
| Устройство для формирования окружностей | 1981 |
|
SU991486A1 |
| Устройство для формирования окружностей | 1984 |
|
SU1221678A2 |
.
