(54) СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОДВИЖНЫХ
ЕДИНИЦ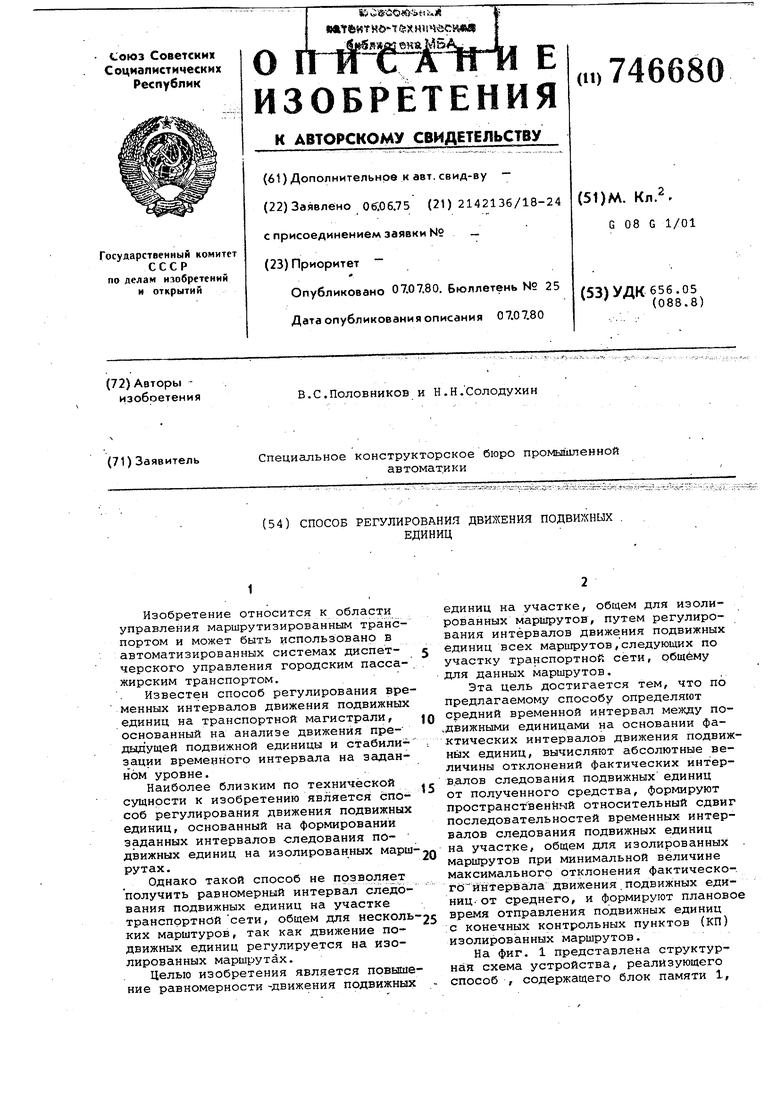

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ ДВИЖЕНИЯ ПОДВИЖНЫХ ЕДИНИЦ НА ТРАНСПОРТНОЙМАГИСТРАЛИ | 1971 |
|
SU423159A1 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2042211C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Устройство для контроля временных интервалов транспортировки и обработки слитков | 1986 |
|
SU1371937A1 |
| Устройство контроля равномерности подачи слитков к нагревательным колодцам | 1985 |
|
SU1294685A1 |
| Способ регулирования движения транспортных единиц | 1989 |
|
SU1672505A1 |
Изобретение относится к области управления маршрутизированным транспортом и может быть использовано в автоматизированных системах диспетЧерского управления городским пассажирским транспортом. Известен способ регулирования вре менных интервалов движения подвижных единиц на транспортной магистрали, осн ованный на анализе движения предыдущей подвижной единицы и стабилизации временного интервала на заданном уровне. Наиболее близким по технической сущности к изобретению является способ регулирования движения подвижных единиц, основанный на формировании заданных интервалов следования подвижных единиц на изолированных марш рутах. Однако такой способ не позволяет получить равномерный интервал следования подвижных единиц на участке транспортнойсети, общем для несколь ких марштуров, так как движение подвижных единиц регулируется на изолированных маршрутах. Целью изобретения является повыше ние равномерности -движения подвижных единиц на участке, общем для изолированных маршрутов, путем регулирования интервалов движения подвижных единиц всех маршрутов,следующих по участку транспортной сети, общему для данных маршрутов. Эта цель достигается тем, что по предлагаемому способу определяют средний временной интервал между по.движными единицами на основании фактических интервалов движения подвижнйх единиц, вычисляют абсолютные величины отклонений фактических интерв.алов следования подвижных единиц от полученного средства, формируют пространственный относительный сдвиг последовательностей временных интервалов следования подвижных единиц на участке, общем для изолированных . маршрутов при минимальной величине максимального отклонения фактическо-. го йнтервала движения.подвижных единиц- от среднего, и формируют плановое время отправления подвижных единиц с конечных контрольных пунктов (КП) изолированных маршрутов. На фиг. 1 представлена структур-ная схема устройства, реализующего способ , содержащего блок памяти 1,
арифметический блок 2, блок сравнеия 3 .и счетчик шагов относительного ременного сдвига 4.
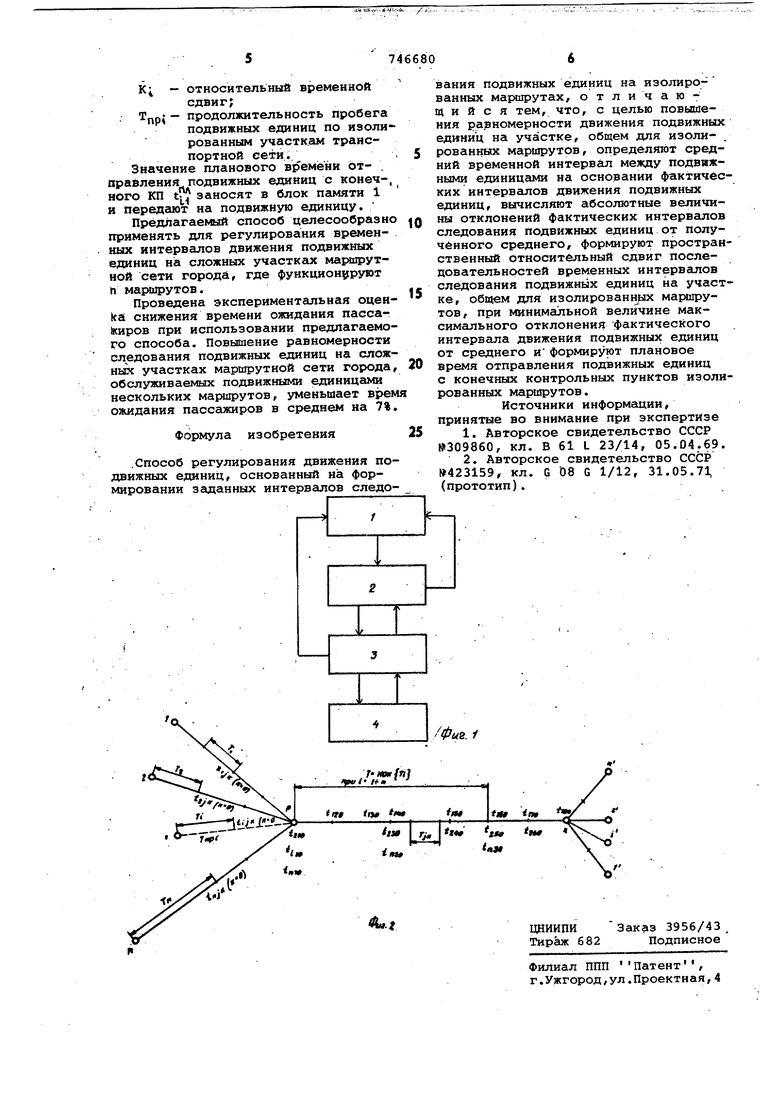
На фиг. 2 приведена развернутая хема маршрутов следования подвижных диниц при относительном временном сдвиге где маршруты обозначены следующим образом:
1-Р-К-1 ; 2-Р-К-2 ,..; t-P-K-1 ; ...;п-Р-К-п; Т , Т,,...,т ,. ..jTr, - заданные интервалы следования подвижных единйц на соответствующих маршрутах;
t - фактические моменты отправения подвижных единиц с конечных
кп;
ТПР - продолжительность пробега подвижных единиц по участкам транспортной сети;
- j-й момент времени отправ ilK
ения подвижной единицы 1-го маршрута при К-ом относительном временном сдвиге.
Информацию о заданных интервалах следования подвижных единиц на изолированных маршрутах, показанных на фиг. 2, а также фактические моменты времени отправления подвижных единиц с конечных КП 1-п (лйбо,Р при конфигурации маршрутов Р-К-1 , Р-К-2 ; ..., Р-К- , ..., Р-К-п ) и продолжительность пробега подвижных единиц по участкам транспортной сети от конечного КП до пункта начала совмеенного участка сети заносят в блок памяти 1.
Временные интервалы следования подвижных единиц на сложном участке транспортной сети Р-К, общем дляп маршрутов, изменяются в широком диапазоне
- ti(i-A)K
Определение временных интервалов Tj проводят с помощью арифметичесKbio блока 2 путем определения разности значений времени двух соседних координат.
Закономерность чередования временных интервалов следования подвижных единиц на участке транспортной сети, общем для нескольких маршрутов, имеет периодический характер.
Продолжительность периода Т равна наименьшему общему кратному (НОК) чисел Т , представляющих собой инTepBajttj следования подвижных единиц на Изолированных маршрутах, т.е. Т НОК (Т .
с помощью арифметического блока 2 определяют среднгао величину интер Всша следования подвижных единиц на участке р-к, общем для нескольких маршрутов,
Т
d
СР
где d - количество временных интервалов Tj в периоде, продолжительностью Т.
С помощью блока сравнения 3 определяют максимальное значение абсолютной величины отклонений фактических интервалов следования подвижных единиц на участке транспортной ;сети, общем для нескольких маршрутов от среднего
At - Tiax TJK| .
Полученные значения заносят в бло памяти 1. При одновременном прибытии подвижных единиц разных маршрутов на сложный транспортный уз-ел Р относительный временной сдвиг К О, Если подвижные единицы разных маршрутов прибывают на сложный транспортный узел р не одновременно, то относительный временной сдвиг К 0. Ша изменения относительного временного сдвига i-й последовательности временных интервалов может быть равен, например, одной минуте (шаг изменения К зависит от величины Т ). Количество шагов изменения относительного временного сдвига заносят в счетчик 4. При К ( О процесс определения At аналогичен случаю K 0. Ограничением является величина Д К НОД(Т) где КОД .1 тД - наибольший -общий делитель чисел, представляющих интервалы движения на изолированных маршрутах. В этом случае диапазон KI составляет 0 - НОД т. Величину ДК заносят в блок памяти 1.
При каждом изменении относительного временного сдвига с помощью блока сравнения 3 анализируют содержимое счетчика 4.
При выполнении условия ДК К; с помощью арифметического блока 2 определяют минимальную величину максимального отклонения фактического итервала движения от среднего значени min max ) - Tj , Ki Г - Д к1 f Величина относительного временного сдвига Kj, при которой обеспечивается минимальная величина макси- мального отклонения фактического интервала движения подвижных единиц на сложном участке транспортной сети от средней величины интервала является оптимальной, так как при этом обеспечивается максимальное приближение к равномерному интервалу следования подвижных единиц на участке Р-К, общем для нескольких маршрутов, и в целом на маршрутной сети.
С помощью арифметического блока 2 определяют плановое время отправления подвижных единиц с конечных КП
марафутов .пл
- К-, -1
.Г)А
где - плановое время отправления подвижных единиц с конечных КП) .
tlK момен-г времени отправления ;подвижной единицы I-маршрута при относительном временном сдвиге KL; . К; - относительный временной сдвиг; пр продолжительность пробега подвижных единиц по изоли рованным участкам транспортной сети. Значение планового времени от- . правления подвижных единиц с конеч-, него КП tjV заносят в блок памяти 1 и передают на подвижную единицу. ; Предлагаемьай способ целесообразно применять для регулирования временных интервалов движения подвижных единиц Hia сложных участках марарутной сети города, где функционируют и маршрутов. Проведена экспериментальная оценka снижения времени ожидания пасса1киров при использовании предлагаемого способа. Повышение равномерности следования подвижных единиц на сложньк участках маршрутной сети города обслуживаемых подвижными единицами нескольких маршрутов, уменьшает врем ожидания пассажиров в среднем на 7% Формула изобретения .Способ регулирования движения подвижных единиц, основанный на формировании Зсшанных интервалов следования подвижных единиц на изолированных мардрутах, отличающийся тем, что, с целью повышения равномерности движения подвижных единиц на участке, общем для изолированных маршрутов, определяют средний временной интервал между подвижными единицами на основании фактических интервалов движения подвижньлс единиц, вычисляют абсолютные величины отклонений фактических интервалов следования подвижных единиц от полученного среднего, формируют пространственный относительный сдвиг последовательностей временных интервалов следования подвижных единиц на участке, общем для изолирован1улх марярутов, при минимальной величине максимального отклонения фактического интервала движения подвижных единиц от среднего и формируют плановое время отправления подвижных единиц с конечных контрольных пунктов изолированных маршрутов. Источники информсщии, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №309860, кл. В 61 L 23/14, 05.04.69. 2.Авторское свидетельство СССР №423159, кл. G Ь8 G 1/12, 31.05.71, (прототип).
