1
Изобретение относится к области управления маршрутизированным транспортом и может быть использовано в системах автоматизированного диспетчерского управления равномерным проследованием подвижными единицами контрольных пунктов маршрута.
Известен способ регулирования временных интервалов движения поездов, основанный на определении временного интервала движения двух поездов и стабилизации этого интервала на заданном уровне.
Однако такой способ не позволяет сохранить динамическое равновесие интервалов следования подвижных единиц в случае возмуш,ающих воздействий.
Целью изобретения является обеспечение равномерности движения подвижных единиц и при наличии возмуш.ающих воздействий.
Эта цель достигается тем, что по предложенному способу определяют фактическое время и фактическое время проследования предыдущего контрольного пункта последующей подвижной единицей. Затем определяют интервалы между фактическим временем проследования конечного контрольного пункта данной подвижной единицей и плановым временем проследования конечного контрольного пункта предыдущей подвижной единицей, а также между фактическими временами проследования предыдущего контрольного пункта данной и последующей подвижными единицами. Определяют плановый интервал отправления данной подвижной единицы путем усреднения полученных временных интервалов и формируют плановое время отправления данной подвижной единицы с конечного контрольного пункта.
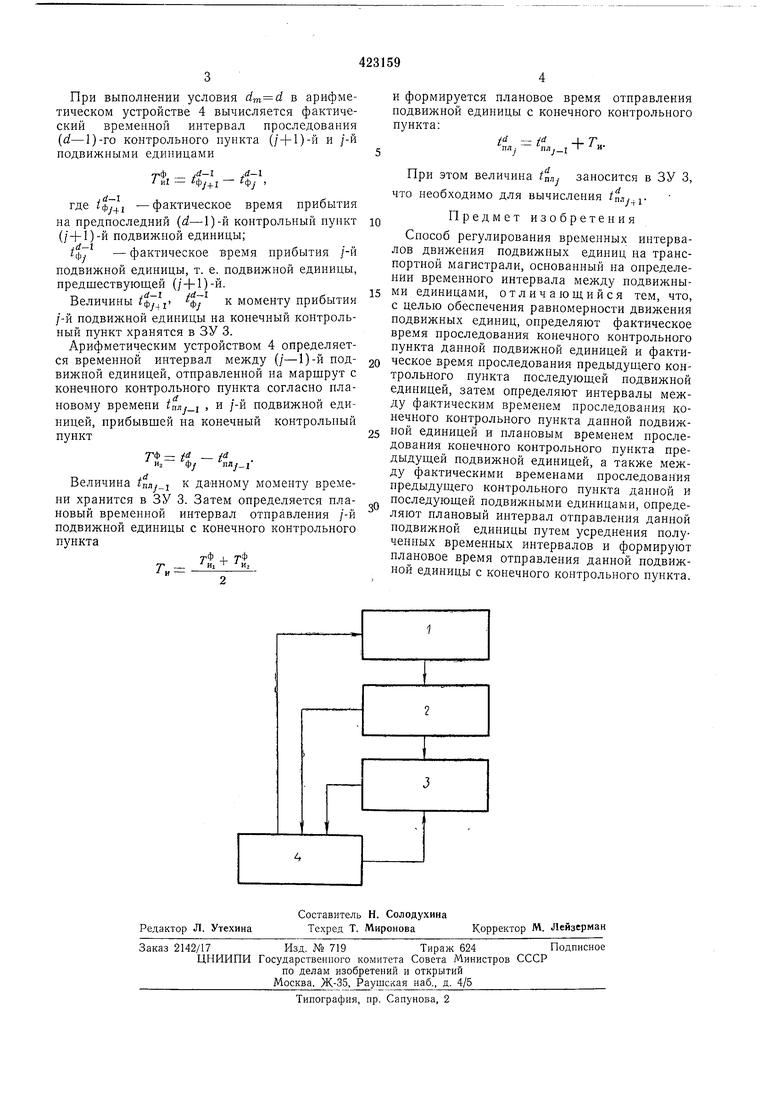
Способ иллюстрируется чертежом.
Точность соблюдения /-и подвижный единицей временного интервала по отношению к (/-1)-Г1 подвижной единице регистрируется блоком контроля 1 проследования ш-го контрольного пункта (dm - текущий номер контрольного пункта), где выясняется факт проследования /-Й подвижной единицей предыдущего, cf(m-i)-ro контрольного пункта и определяется отклонение от планового фактического времени нроследования расстояния между двумя соседними контрольными пунктами
п-1 -тПри проследовании dm-ro контрольного пункта /-Й подвижной единицей узел сравнения 2 анализирует условия , , где d - номер конечного контрольного нункта,
& dm - текущий номер контрольного пункта. При выполнении условия фактическое время проследования предпоследнего (d-1)-го контрольного пункта /-и подвижной единицей заносится в запоминающее устройство (ЗУ) 3.
При выполнении условия в арифметическом устройстве 4 вычисляется фактический временной интервал проследования (d-1)-го контрольного пункта (/-|-1)-й и /-Й подвижными единицами
Т1ф jd1;d1
к - ФJ+l Фу
,d-I
где tфJ.l -фактическое время прибытия на предпоследний (d-1)-й контрольный пункт (/+1)-й подвижной единицы;
ф7 - фактическое время прибытия /-и подвижной единицы, т. е. подвижной единицы, предшествующей (/+1)-й.
Величины к моменту прибытия /-Й подвижной единицы на конечный контрольный пункт хранятся в ЗУ 3.
Арифметическим устройством 4 определяется временной интервал между (/-1)-й подвижной единицей, отправленной на маршрут с конечного контрольного пункта согласно плановому времени , и /-и подвижной единицей, прибывшей на конечный контрольный пункт
-pff-fd /d
ИгфуПЛу |
Величина гплу„1 к данному моменту времени хранится в ЗУ 3. Затем определяется плановый временной интервал отправления /-и подвижной единицы с конечного контрольного пункта
т-Ф j т
т- Ki Кг
И - 1
И формируется плановое время отправления подвижной единицы с конечного контрольного пункта:
d - idл т
. пл,1 иПри этом величина /пл,- заносится в ЗУ 3, что необходимо для вычисления плу хПредмет изобретения
Способ регулирования временных интервалов движения подвижных единиц на транспортной магистрали, основанный на определении временного интервала между подвижными единицами, отличающийся тем, что, с целью обеспечения равномерности движения подвижных единиц, определяют фактическое время проследования конечного контрольного пункта данной подвижной единицей и фактическое время проследования предыдуш,его контрольного пункта последуюш.ей подвижной единицей, затем определяют интервалы между фактическим временем проследования конечного контрольного пункта данной подвижной единицей и плановым временем проследования конечного контрольного пункта предыдущей подвижной единицей, а также между фактическими временами проследования предыдущего контрольного пункта данной и последующей подвижными единицами, определяют плановый интервал отправления данной подвижной единицы путем усреднения полученных временных интервалов и формируют плановое время отправления данной подвижной единицы с конечного контрольного пункта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования движения подвижных единиц | 1975 |
|
SU746680A1 |
| Устройство для управления движением поездов | 1976 |
|
SU592067A1 |
| Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне | 2021 |
|
RU2762453C1 |
| Устройство управления движением поездов метрополитена | 1977 |
|
SU727504A2 |
| Способ регулирования движения подвижных единиц | 1988 |
|
SU1571637A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПРОИЗВОДИТЕЛЬНЫХ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ ЭЛЕКТРОПОДВИЖНЫМ СОСТАВОМ ПРИ НАГОНЕ ГРАФИКОВОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ БОРТОВЫХ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ УЧЕТА ЭЛЕКТРОЭНЕРГИИ | 2015 |
|
RU2591558C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| Система автоматического управления движением поездов | 1975 |
|
SU768685A1 |
| Способ контроля проследования поездов по перегону | 2021 |
|
RU2775025C1 |
