Изобретение относится к способам регулирования движения транспортных единиц и может быть использовано в автоматизированных системах диспетчерского управления работой в открытых разрезах рудных месторождений.
Целью изобретения является повышение информативности способа.
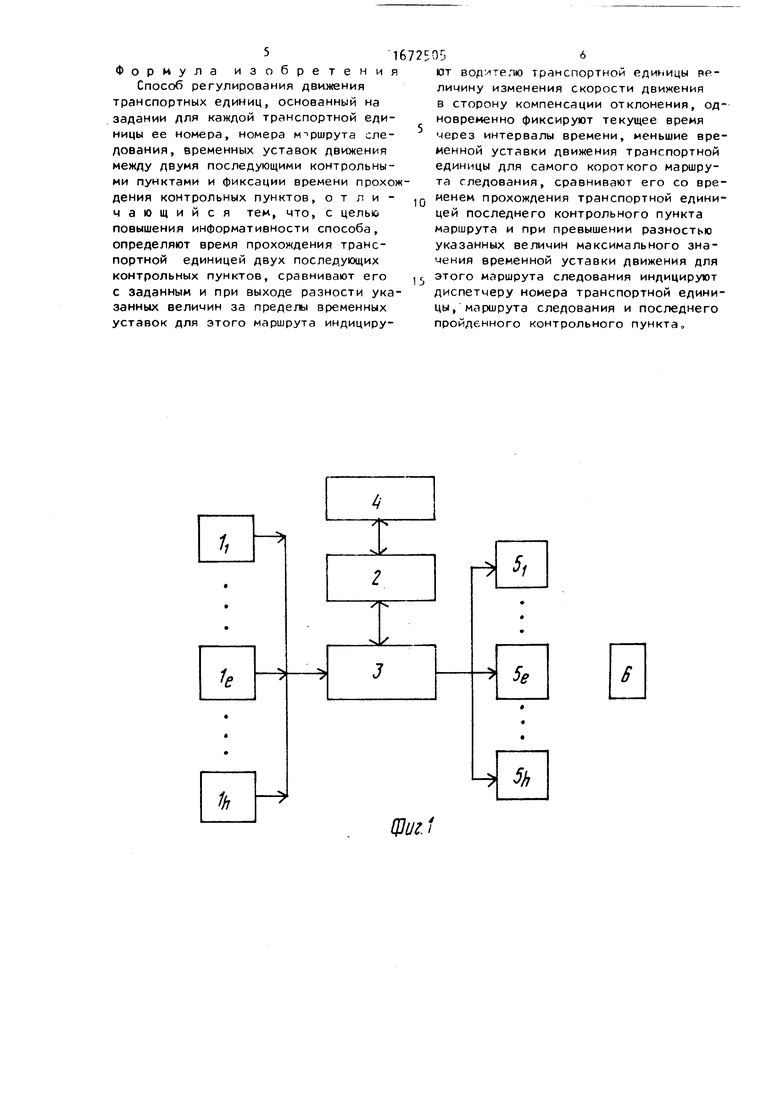
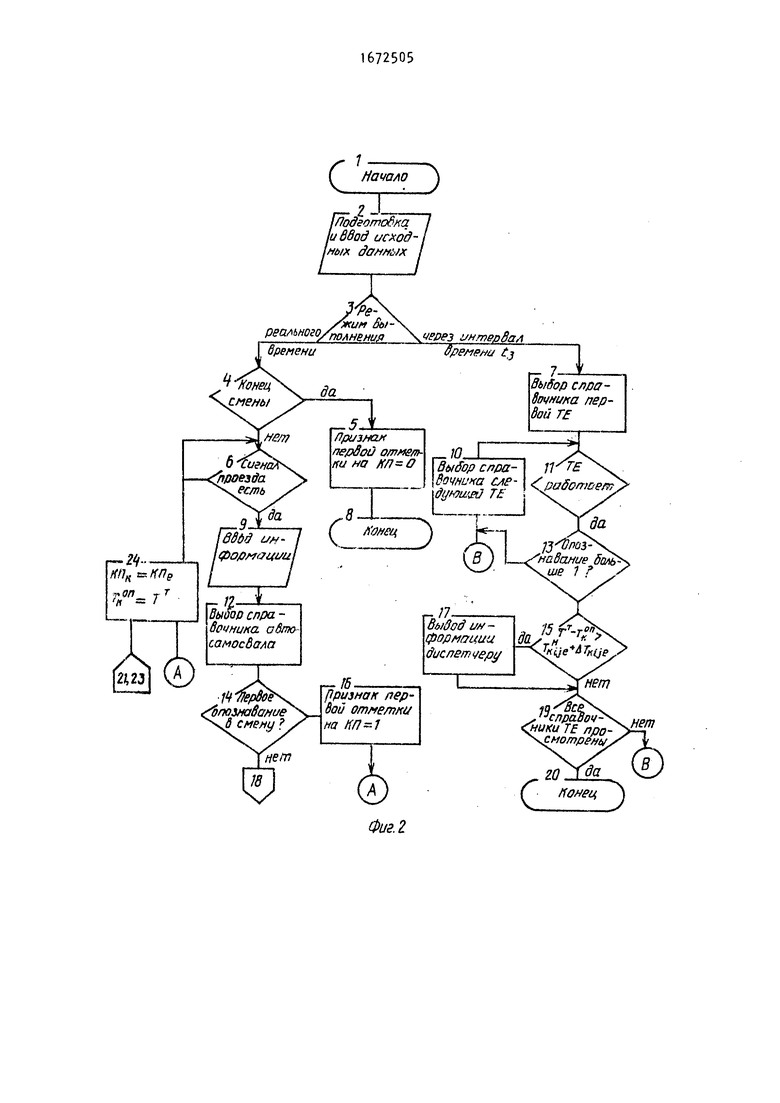
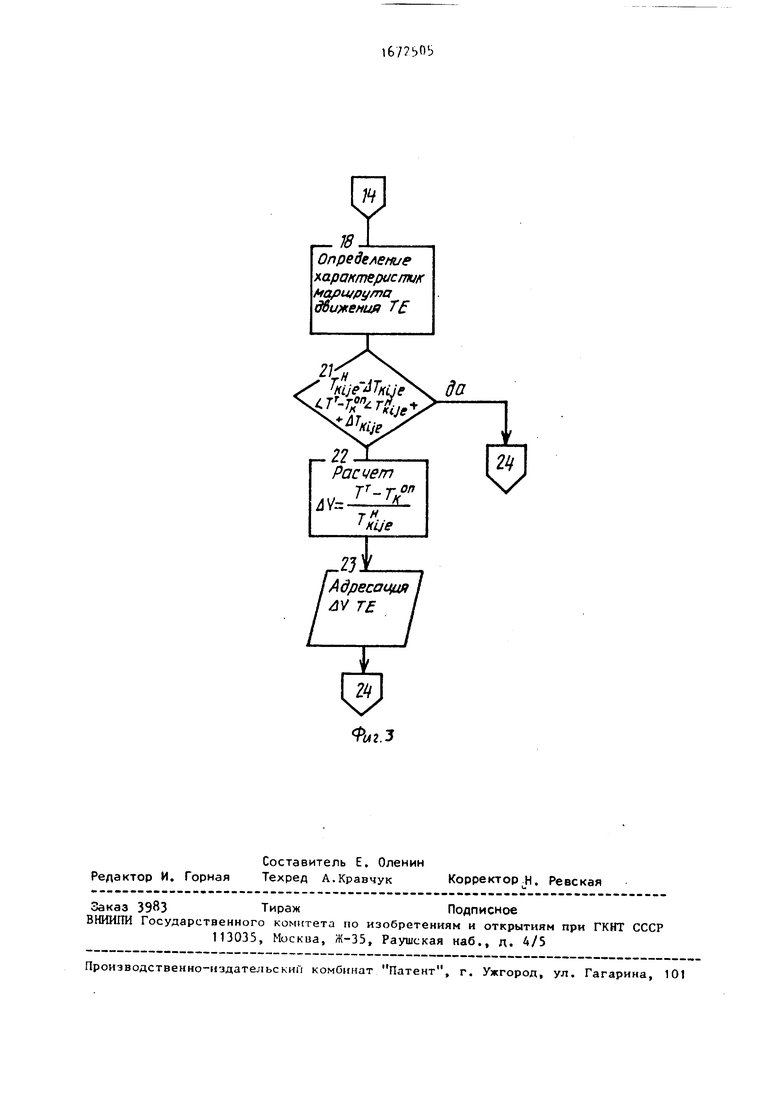
На фиг01 представлена блок-схема устройства для реализации предлагаемого способа; на фиг „2 - блок-схема алгоритма работы устройства; на фи,г03 продолжение блок-схемы на фиг. 2,
Устройство для реализации способа содержит блоки 1.1,.. ,1 е,.,,,КЬ контроля номера и направления движения транспортных единиц, вычислитель J, выполненный в виде ЭВМ серии СМ, С -ок 3 связи с объектами, выполненный в виде стандартной платы модуля ввода-вывода дискретной информации, блок k отображения информации диспетчеру, блоки 5о1,а,„,5,е,. „,5.п отображения информации водителю транспортной единицы, транспортную единицу 6. На блок-схеме алгоритма работы устройства (фиг.2 и 3) показаны блоки 1-2.
Си
vl
ю
СП
о
СЛ
Способ осуществляют следующим образом.
Перед началом смены информацию о времени окончания смены, заданных интервалах движения транспортных единиц между двумя последовательными контрольными пунктами всех маршрутов следования в виде временных уставок (максимальных и минимальных), а также справочники каждой транспортной единицы, содержащие помимо другой информации ее номер и маршрут следования, признак первой отметки на контрольном пункте (на начало смены равного 0), заносят в вычислитель 2.
Временные уставки движения транспортных единиц между двумя последовательными контрольными пунктами маршрута определяются как
и
K je
± ат.
Mje
где Т,
Kije
IT
Kije
нормативное время движения транспортной единицы между контрольными пунктами k и е маршрута ij; допустимое отклонение времени движения транспортной единицы между контрольными пунктами k и е маршрута ij.
В справочник транспортной единицы в реальном масштабе времени зано-. сится номер контрольного пункта ( пройденного транспортной единицей последним, и время его прохождения (Т°п). При первом опознавании транспортной единицы на любом КП изменяется признак первой отметки на КП.
Появление транспортной единицы на е-м контрольном пункте фиксируется устройством контроля номера и направления движения транспортной единицы 1,е (номер может определяться фотоспособом на просвет по кодовой решетке, а направление движения - по первой цифре кода - в .одном направлении 1, в другом О), таймером вычислителя - время опознавания- (Тт)о Информация с е-го КП вводится в вычислитель 2 посредством блока 3 (фиго2 и 3).
В вычислителе 2 из справочника соответствующей транспортной единицы выбирается маршрут следования и номер последнего пройденного КП на данном маршруте (КПц), признак первой отметки на КП„ Если признак равен О,
то он увеличивается на 1 (блок 16, фиго2) и ожидается отметка следующей транспортной единицы. Исходя из направления движения и значения КП определяется номер контрольного пункта (КПе), на котором произошло опознавание транспортной единицы, выбираются временные уставки движения (фиг.2 и 3).
На основе выбранной информации в вычислителе 2 проверяется соотношение
Лтк. це
т1 т° / тн. Tmje
+ а т,
че,
п
0
0
5
При выходе разницы (Тт - Т2)
к за
границы, определенные уставками, вычислителем 2 рассчитывается величина изменения скорости движения транспортной единицы (), при движении с которой транспортная единица до следующего контрольного пункта компенсирует отклонение от заданного времени движения и которая индицируется водителю транспортной единицы блоком отображения,,
В справочнике соответствующей транспортной единицы заменяется КП на КПе и Т°п на Тт (фиг,2 и 3)
Перед каждым переходом на ожидание сигнала проезда производится проверка окончания смены (текущее время Т сравнивается с временем конца смены ), и в случае алго- 5 ритм заканчивает работу.
Через промежутки времени t,,( ) вычислитель 2 для
каждой работающей транспортной единицы (работающей считается транспортная единица, хотя бы один раз опоз- навшаяся на любом КП) сравнивает TЈ° с текущим временем Тт (берется от таймера вычислителя 2) и в случае
Тт on
Т
Kije
+ Mt
Sje
посредством
- блока 4 отображения диспетчеру индицируют номер транспортной единицы, маршрут следования, номер последнего пройденного КП, что позволяет определить участок аварийной остановки
0 транспортной единицы (фиг.2 и ЗК
При расчетах в вычислителе 2 собирается статистика о временах прохождения участков маршрутов, ограниченных послгдовательными КП, при различных условиях (погодных, сезонных и т.п.) соответственно корректируются применительно к обстановке Т.nje
AT
чуе
1зФориула изобретени
Способ регулирования движения транспортных единиц, основанный на задании для каждой транспортной единицы ее номера, номера маршрута следования, временных уставок движения между двумя последующими контрольными пунктами и фиксации времени прохождения контрольных пунктов, отличающийся тем, что, с целью повышения информативности способа, определяют время прохождения транспортной единицей двух последующих контрольных пунктов, сравнивают его с заданным и при выходе разности указанных величин за пределы временных уставок для этого маршрута индицируя
672 356
ют водителю транспортной единицы ре- личину изменения скорости движения в сторону компенсации отклонения, одновременно фиксируют текущее время через интервалы времени, меньшие временной уставки движения транспортной единицы для самого короткого маршрута следования, сравнивают его со вреJQ иенем прохождения транспортной единицей последнего контрольного пункта маршрута и при превышении разностью указанных величин максимального значения временной уставки движения для
(5 этого маршрута следования индицируют диспетчеру номера транспортной единицы, маршрута следования и последнего пройденного контрольного пункта

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| Способ управления движением автомобильного транспорта на открытых разработках | 1988 |
|
SU1548806A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Устройство для контроля движения транспортных средств | 1980 |
|
SU936006A1 |
| Устройство контроля равномерности подачи слитков к нагревательным колодцам | 1985 |
|
SU1294685A1 |
| Устройство для контроля перемещения железнодорожных составов | 1983 |
|
SU1207875A1 |
Изобретение относится к способам регулирования движения транспортных единиц и может быть использовано в автоматизированных системах диспетчерского управления работой в открытых разрезах рудных месторождений. С целью повышения информативности способа определяется время прохождения транспортной единицей двух последующих контрольных пунктов, сравнивается с заданным и при выходе разности указанных величин за пределы временных уставок для этого маршрута индицируется водителю транспортной единицы величина изменения скорости движения в сторону компенсации отклонения, одновременно фиксируется текущее время через интервалы времени, меньшие временной уставке движения транспортной единицы для самого короткого маршрута следования. Это время сравнивается со временем прохождения транспортной единицей последнего контрольного пункта маршрута. Эти превышения разности указанных величин максимального значения временной уставки движения для этого маршрута, индицируются диспетчеру номера транспортной единицы, маршрута следования и последнего пройденного контрольного пункта. 2 ил.
//
-
Щиг.1
О
C4J
СМ
т
,-# Определение характернопик Haputpy/na движения TЈ
21
W
т
делен терн py/na ния
да
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
